
Fターム[3E054GC07]の内容
包装位置への供給−物品の供給 (7,769) | 検知、制御(制御) (316) | マイコン制御 (53)
Fターム[3E054GC07]に分類される特許
1 - 20 / 53
物品整列装置
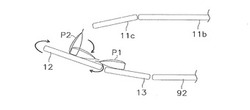
【課題】異なる形状の端部を有する物品を効率よく箱詰めすることを可能にする物品整列装置。
【解決手段】袋P2は、傾斜搬送部11cから停止中の第2の搬送装置12に落下する。袋P2の落下が、落下検知センサによって検知されると、第2の駆動部は制御される(第1の処理)。第2の駆動部は、袋P2が第2の搬送装置12のベルトコンベアに落下した後、第2の搬送装置12を駆動させる。このとき、袋P2は、上端を下流側に倒す。袋P2は、上端が下流側、下端が上流側に位置するように倒れる。これにより、袋P2は、第2の搬送装置12によって第2の平面状態で搬送される。第2の駆動部のモータの回転数が所定値に達すると、袋P2は、第3の搬送装置13に受け渡される。
(もっと読む)
丁合い封書作製装置

【課題】封書を簡単に製造できる丁合い封書作製装置を提供する。
【解決手段】縦方向搬送部30は、下表紙3の左側縁部3Lに、接着材3aを縦方向Yに沿って塗布する下表紙−封入物接着材塗布部34と、接着材3aによって、下表紙3及び封入物4を接着して積層体5を作製する下表紙−封入物積層部35と、積層体5の下表紙3の右側縁部3Rに、接着材3bを縦方向Yに沿って塗布する第1下表紙−上表紙接着材塗布部37と、積層体5の封入物4の左側縁部4Lに、接着材4bを縦方向Yに沿って塗布する封入物−上表紙接着材塗布部38とを備え、左右方向搬送部40は、積層体5の下表紙3の縦方向Yの上下縁部3D,3Uに、接着材3cを左右方向Xに沿って塗布する第2下表紙−上表紙接着材塗布部43と、接着材3a,4b,3c,3dによって、上表紙2及び積層体5を接着して封書1を作製する積層体−上表紙積層部44とを備える。
(もっと読む)
果実の容器詰め装置
【課題】出荷パック内に見栄え良くイチゴを整列する。
【解決手段】制御部は、マシンビジョン62が取得した収穫箱70に収容されたイチゴの画像に基づいてイチゴの吸着位置を検出し、イチゴ搬送装置10に、収穫箱70に収容されたイチゴを吸着保持させるとともに、中継コンベア40上にイチゴを一旦載置させる処理と、マシンビジョンが取得した中継コンベアに載置されたイチゴの画像に基づいてイチゴの向き及び吸着位置を検出し、イチゴ搬送装置に、中継コンベアに載置されたイチゴを吸着位置にて吸着保持させるとともに、イチゴの向きに基づいて出荷パック52A〜52Dにイチゴを搬送させる処理とを実行させる。
(もっと読む)
整合装置及び封入封緘装置
【課題】用紙の幅寸法に対して封筒の幅寸法に余裕があるときに整合動作を省略して生産性を向上させる。
【解決手段】搬入した用紙の両側端を整合する整合部4を備えた整合装置1において、用紙を封入する封筒の封筒サイズ情報から得られる幅寸法から整合対象となる用紙の用紙サイズ情報から得られる幅寸法を差し引いた差分値と、予め設定された整合動作実行判別用閾値とを比較し、前記閾値を超えたときに整合動作を行わないように制御する制御部7を備えた。
(もっと読む)
果実保持装置
【課題】イチゴを吸着保持する際のイチゴの損傷を抑制する。
【解決手段】制御部が、吸着前画像取得部により取得されたイチゴの画像から、イチゴの向きと吸着位置とを検出し(ステップS10,S12)、移動部を介して、一端部にイチゴと接触する接触部を有する筒状の吸着管を移動して、接触部をイチゴの吸着位置に接近させ、接触部がイチゴの吸着位置に接触する前に、吸着管の内部を負圧にする負圧発生機構の動作を開始する(ステップS18)。これにより、イチゴの方が、イチゴが載置されている面(載置面)から離れて吸着管に吸い寄せられるようになる。
(もっと読む)
箱詰め装置の運転方法
【課題】 物品収容部外へと物品を飛び出させるリスクおよび無端ベルトへの過剰負荷が、従来例よりも低減する箱詰め装置の運転方法を提供する。
【解決手段】 箱詰め装置100の運転方法は、整列コンベア2の運転パターンが、物品1の受け渡しにおける整列コンベア2での物品の処理能力に応じて区分けされている。そして、制御装置30が、検出手段20を用いて物品供給コンベア3での物品1の供給能力のサンプリングを行い、このサンプリングデータに基づいて物品1の供給能力の最大値を抽出し、この最大値に適合する運転パターンの設定値を用いて整列コンベア2での物品1の処理能力を調整する方法である。
(もっと読む)
搬送装置
【課題】構造をシンプルにして小型化した搬送装置を提供する。
【解決手段】搬送装置10は、物品XA1を収容することができる複数のバケット19,20と、これらのバケット19,20を、水平方向に往復走行させる直動ロボット13,14と、バケット19,20を、鉛直方向に往復走行させるエアシリンダユニット15,16と、直動ロボット13,14およびエアシリンダユニット15,16を協働させて各バケット19,20を順次環状の移動軌跡上を循環させる制御部と、を備えている。
(もっと読む)
複数の食製品の半重ね方法及び装置
【課題】扁平状な食製品を半重ねする方法及び装置を提供する。
【解決手段】食製品5を搬送する搬送コンベア7の搬送方向に長い一対の製品受け部材23を開閉自在に備えた製品受け装置19における前記一対の製品受け部材23を、前記搬送コンベア7における搬送方向の上流側へ相対的に移動し一対の製品受け部材23を閉動作して、当該一対の製品受け部材23の長手方向の受け入れ位置に、食製品5を受け入れて保持する。次に、前記一対の製品受け部材23の長手方向の前記受け入れ位置よりも上流側の所定位置に対応する下方位置に、前記次の食製品5が達したときに、前記一対の製品受け部材23を開動作して、保持していた食製品5を前記次の食製品5に重ねる。そして、前記次の食製品5が前記受け入れ位置に対応したときに、前記一対の製品受け部材23を閉動作して重ねた状態の食製品5を受け入れて保持することを、複数回繰り返す。
(もっと読む)
画像形成システム、画像形成方法、及び画像形成制御プログラム
【課題】任意の封筒に紐付けされた一意の印刷ジョブをその封筒へ封入することができるようにする。
【解決手段】用紙に対して画像を形成する画像形成装置本体1と、画像形成する印刷データを記憶するハードディスクと、印刷データの識別情報としてバーコードで印刷された封筒を供給する封筒給紙装置4と、バーコードを読み取って認識するCIS70と、を備えた画像形成システムにおいて、読み取ったバーコード情報に基づいてハードディスクに記憶されている印刷データを選択し、用紙に画像形成装置で前記選択された印刷データを印刷させ、SSP装置3で封筒窮地装置4から給紙された封筒内に印刷された用紙を封入する。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができ、箱に投下した物品の姿勢が乱れるのを防止することができる箱詰め装置を提供すること。
【解決手段】 第3及び第4の羽根車21、22の下方の所定位置に一時保持装置40を設け、一時保持装置40は、受け取り角度位置において投下装置20から投下された複数の物品を受け取って、減速しながら停止角度位置に停止し、その後、複数の物品を箱に落下させる。
(もっと読む)
封入装置及び封入管理方法
【課題】封筒に封入する封入物を送信先毎に選択することのできる封入装置を提供することを目的とする。
【解決手段】封入装置1は,封筒3に封入する封入物2をスタックするスタッカー11aを有する複数のフィーダ11を備え,送信先毎に割り振られた管理番号に関連付けて,管理番号に対応する送信先へ送信する封入物2の種別を示す種別記号が記述された事前データを用い,管理番号に関連付けられた種別番号で示される種別の封入物2がスタックされているフィーダ11のみを作動させるように制御しながら,事前データに記述された管理番号毎に封入処理を行う。
(もっと読む)
姿勢制御装置
【課題】包装物を効率よく収納させる姿勢に制御させる姿勢制御装置を提供することである。
【解決手段】姿勢制御装置400においては、第1保持板410、第2保持板430を有する。第1保持板410、第2保持板430、第3保持板、一対の開閉装置440,441により略直立姿勢で集積された包装物800が集積方向の両側から保持される。また、包装物800をダンボール箱内に箱詰めする前に振動装置460により第1保持板410が矢印MV1の方向に往復移動され間隔が変動される。
(もっと読む)
製品マルチパックおよび当該製品マルチパックを方向付けて包装するシステム
製品マルチパックと当該マルチパックを方向付けかつ包装するシステムとが提供される。マルチパックは、ロケータウェブによって連結され、カートン内に収容されてディスプレイされる複数の細長い製品容器を含む。システムは、マルチパックを方向付けかつ包装するための複数のステーションと通信するコントローラを有している。運搬中の一連の容器上にウェブを取り付けるウェブ付加ステーションが提供される。容器を方向付けするためのウェブに対して各容器を回転させるようにコントローラと通信する整列ステーションが提供される。接続された一連の容器を、連結された容器のサブアセンブリに分離するようにコントローラと通信するウェブ切断ステーションが提供される。さらに、システムは、連結されて方向付けされた容器を各カートンに受け渡す受け渡しステーションおよびカートン供給ステーションを有している。 (もっと読む)
薬剤供給装置
【課題】作業者によって行われる事前準備を簡易化した薬剤供給装置を提供する。
【解決手段】タブレットケース3に収納した薬剤以外の種類の薬剤を、ホッパー54内に投入自在な薬剤フィーダ90を有し、薬剤フィーダ90が、薬剤投入口99および投入された薬剤を一時的に留め置くシャッターユニット91を備え、該ケース内に投入されシャッターユニット91に留め置かれた薬剤の種類を外部から視認可能に構成し、さらにシャッターユニット91を開くシャッター開閉スイッチ113を備えるようにした。
(もっと読む)
知的製品供給システムおよび方法
【課題】知的製品供給システムを提供する。
【解決手段】知的製品供給システムは、複数の列として形成され各列が投入機構と送出機構の間の処理方向に沿って直列に配置された1以上の搬送モジュールを含む配列であって、搬送モジュールの少なくともいくつかが可変速度搬送モジュールであり、個々の可変速度搬送モジュールが、後続モジュールまたは送出機構へ製品を供給すべく先行モジュールまたは投入機構から製品を受け入れる第1端部から第2端部へ製品を搬送するモジュール搬送機構および製品搬送速度を制御すべくモジュール搬送機構に接続された速度制御要素を含む配列と、製品がどの経路を辿るかを記述する計画を作成し投入機構により配列へ不規則に配送された製品のグループを指定された製品構成に従い向きを揃えて同期的に送出機構へ搬送すべく列の少なくとも1個のモジュールを計画に従い動作させるべく速度制御要素と接続されたプランナとを含む。
(もっと読む)
矯正装置、搬送ユニットおよび電子部品収納システム
【課題】電子部品に対してストレスを与えずに姿勢を矯正することができる矯正装置、搬送ユニットおよび電子部品収納システムを提供する。
【解決手段】カメラ4による電子部品の姿勢の検出結果に基づいて、矯正装置5のアライメントポケットを電子部品の姿勢に応じた位置に移動させてアライメントポケットに当該電子部品を収容させた後、この電子部品が所定の姿勢となるようアライメントポケットを移動させることにより、従来のように電子部品Aを挟み込まなくてよいので、電子部品Aに対してストレスを与えずに姿勢を矯正することができる。
(もっと読む)
手撒き薬剤供給装置、薬剤の手撒き方法、及び、薬剤分包装置
【課題】一度に複数の処方データについて薬剤を手撒きでき、しかも種々の要望に応じて適切に手撒きできるようにする。
【解決手段】処方データを受信する受信手段7と、トレイ5の各枡4に収容する薬剤の割当条件を記憶する記憶手段8と、受信手段7に順次受信される処方データ12に基づいて、記憶手段8に記憶させた割当条件に従って、トレイ5の各枡4に手撒きする薬剤の位置を決定する位置決定手段10と、位置決定手段10によって決定された手撒き位置を表示する表示手段9とを備えた構成とする。
(もっと読む)
薬剤包装装置の自由形状錠剤の自動排出器及び錠剤供給方法
多様な形状の錠剤を自動包装させ、錠剤供給を清潔で正確に投与するようにし、迅速に錠剤供給を行える薬剤包装装置の自由形状錠剤の自動排出器及び錠剤供給方法に関するものである。薬剤包装装置の自由形状錠剤の自動排出器は、内部に錠剤が収容される空間部が設けられ、空間部に収容された錠剤の移送をガイドするものであって、上向きに形成された案内トラックを備える本体と、本体の空間部に収容された錠剤が、案内トラックに沿って上部に移送されるように、本体を振動させる駆動部と、を備えることを特徴とする。 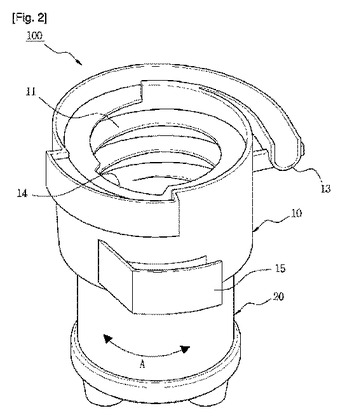 (もっと読む)
(もっと読む)
製品供給装置
自動供給装置は医薬投与剤形等の製品をブリスタパックに充填するためによく用いられる。これらの装置は通常特定の形状及び寸法の製品を扱うために設計されている。異なる形状の製品を扱うためには、製品と接触する全ての部品を取替える必要があり、高価になる。本発明は一つの供給装置が多種多様な製品寸法/形状を扱うために迅速に構成されることを可能にする。装置(21)は一連のテーパ状の溝(40)を画定するトレイ(36)と、前記トレイの上方に摺動可能に取付けられたコンテナ(22)とを備える。前記コンテナの壁及び前記溝は共に各溝内に製品が前記コンテナから通過する開口を画定する。前記コンテナの前記平面的なトレイ表面(38)を横切って、前記溝に沿った、かつ該溝を越えた摺動により、前記開口の寸法を、扱われる製品の寸法に従い、同一の部品を用いて調節することが可能になる。 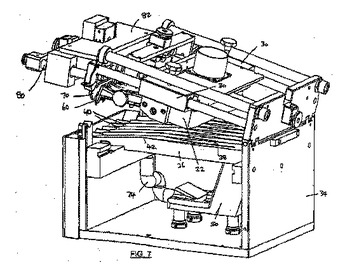 (もっと読む)
(もっと読む)
1 - 20 / 53
[ Back to top ]