
Fターム[3F022NN02]の内容
Fターム[3F022NN02]の下位に属するFターム
絶対番地方式 (13)
相対番地方式(カウント方式) (3)
Fターム[3F022NN02]に分類される特許
1 - 20 / 154
電動式移動棚
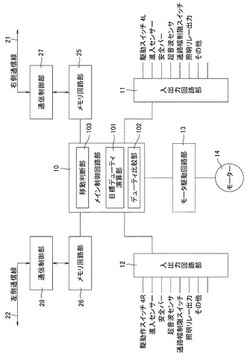
【課題】構成が簡単で、迅速に順次駆動が行われる電動式移動棚を得る。
【解決手段】複数の移動棚がモータ14の駆動力により移動可能に並べられてなる電動式移動棚システムを構成する個々の電動式移動棚が、駆動源であるモータ14と、モータ14の正逆回転および停止を制御する制御回路10と、を有し、個々の移動棚における制御回路10は、目標とする駆動デューティと現在の駆動デューティを比較するデューティ比較部102を有し、個々の移動棚は、デューティ比較部102による比較結果が現在の駆動デューティより目標とする駆動デューティが大きい場合にモータ14を駆動するモータ駆動回路部13を有してなる。
(もっと読む)
在庫品目を輸送する方法及びシステム

【課題】在庫システムに関する不利及び問題を実質的に軽減し或いは解消する。より具体的には、特定の種類の操作誤りの自動的な訂正のための技法を支持する移動式在庫システムを提供する。
【解決手段】在庫品目を輸送するためのシステムは、在庫品目を貯蔵し得る在庫ホルダと、移動式駆動ユニットとを含む。移動式駆動ユニットは、移動式駆動ユニットに連結され且つ移動式駆動ユニットによって支持される少なくとも1つの在庫ホルダと共に第一地点に移動し得る。移動式駆動ユニットは、追加的に、在庫ホルダの位置を決定し、在庫ホルダの場所と第一地点との間の差を計算し得る。移動式駆動ユニットは、次に、差が所定の公差よりも大きいか否かを決定し得る。差が所定の公差よりも大きいという決定に応答して、移動式駆動ユニットは、在庫ホルダの場所に基づき第二地点に移動し、在庫ホルダと結合し、且つ、移動式駆動ユニット及び在庫ホルダを第一地点に移動し得る。
(もっと読む)
自動倉庫設備
【課題】地震の揺れによる損傷を極力抑制できる自動倉庫設備を提供すること。
【解決手段】物品収納棚3が、棚奥行き方向に並べて配置される前後一対の支柱6a・6bからなる支柱対6を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で支柱対の間に収納部2が位置するように構成され、地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段が設けられ、スタッカークレーン5の作動を制御する制御手段が、スタッカークレーンを走行作動させている場合において、揺れ予測情報取得手段が揺れ予測情報を取得すると、地震対策処理としてベイごとに設定された走行停止位置にスタッカークレーンを停止させるべく、スタッカークレーンの作動を制御するように構成されている。
(もっと読む)
自動搬送システム
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
物品収納設備
【課題】物品保持部を引退位置からの突出作動を開始するタイミングを簡単な処理で求めることができる物品収納設備を提供する。
【解決手段】複数の収納部のうちで移載作業対象とする収納部が指示されると、移動開始位置から設定移動速度まで加速して設定移動速度で移動した後、減速して移載作業対象とする収納部に対する目標停止位置まで移動させるべく、移動基台の移動を制御する移動制御を実行し、計時手段にて計時された経過時間が移動開始位置から目標停止位置に移動基台が移動する所要時間より突出用設定時間だけ短い時間になると引退位置からの突出作動を開始して、移動基台が目標停止位置に停止する前に、移載装置における物品保持部を引退位置から突出位置に向けて突出作動させることを開始する突出制御を実行する。
(もっと読む)
自動倉庫設備
【課題】地震の揺れやスタッカークレーンの走行等により物品収納棚が揺動又は震動した場合にも、物品における荷が荷崩れを起こすことを抑制できる自動倉庫設備を提供する。
【解決手段】制御手段が、物品収納棚2における設定高さTより低い位置に位置する収納部を下方側収納部2Sdとして管理するように構成され、かつ、物品における荷の荷姿についての荷姿情報に基づいて入庫対象の物品が設定荷姿条件を満たすか否かを判定する荷姿条件判定処理を実行し、入庫対象の物品が設定荷姿条件を満たさない場合は、収納部選択処理において、選択対象の収納部を下方側収納部2Sdに制限した制限選択条件に基づいて、当該物品を収納する収納部2sを選択するように構成されている。
(もっと読む)
走行体制御装置、走行体制御方法、走行体制御プログラム及び記録媒体
【課題】被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することが可能な走行体制御装置を提供する。
【解決手段】ガラス板Gを搬送するスタッカクレーンSを制御する場合に、ガラス板GのスタッカクレーンSへの搭載及びガラス板Gにおける振動の発生が共に検出されたとき、スタッカクレーンSを減速又は停止させる。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け渡しの際の位置決めをより好適に行う。
【解決手段】ロール体搬送用無人搬送車100は、ロール体の胴部が載置される載置台102と、ターレットに対する載置台102の位置を検出する第1位置検出器138、第2位置検出器140と、載置台102を非鉛直方向に動かす移動部と、載置台102を回転させる回転部と、本体168がロール体をターレットに渡すために停止しているとき、第1位置検出器138、第2位置検出器140によって検出される載置台102の位置が所定の基準位置に近づくように、移動部および回転部のうちの少なくともひとつを制御する制御部50と、を備える。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け取りをよりスムーズに行う。
【解決手段】ロール体搬送用無人搬送車100は、ターレットによって空中に支持されているロール体の胴部に鉛直方向下側から接触する載置台102と、載置台102にかかる荷重を検出する荷重検出部と、荷重検出部によって検出される荷重に基づいて、載置台102がロール体を押す力を調整する荷重調整部と、を備える。荷重調整部は、荷重検出部によって検出される荷重がロール体の重量に近づくように、載置台102がロール体を押す力を調整する。
(もっと読む)
搬送車システムのシミュレーションシステムとシミュレーション方法
【課題】
半導体等の生産計画に沿って搬送車システムを動作させた際の状況をシミュレーションする。
【構成】
処理装置での仮想的な生産計画を管理し、生産計画に従って、仮想的な搬送車への走行計画を作成し、作成した走行計画に従って、仮想的な搬送車の位置と速度を時間の関数として表す走行スケジュールを作成し、走行スケジュールに従って仮想的な搬送車を、実在の搬送車システムの制約に従って、かつ搬送車間の干渉を回避するように走行させる。
(もっと読む)
自動倉庫システム
【課題】 省スペース化した自動倉庫システムを提供することを目的とする。
【解決手段】 自動倉庫システム(20)は、垂直に伸びる複数の支柱(103)と水平に伸びる複数の梁(105)とによって組み上げられた複数の保管エリア(RC)に荷物(BG)を格納し、複数の保管エリアに荷物を搬入し且つ複数の保管エリアから荷物を搬出する。そして自動倉庫システムは、支柱に配置された縦ガイドレール(110)と、梁に配置された横ガイドレール(110)と、少なくとも1つの保管エリアと同じ矩形状の縦枠及び横枠を有する枠体(51)と、縦枠に配置され縦ガイドレール又は横枠に配置され横ガイドレールと係合するガイドローラ(52)とを有する移動台車(50)と、を備える。
(もっと読む)
移動棚装置
【課題】移動棚を固定して移動棚間の間口を確保するとともに間口幅を調整する調整負担を回避し、しかも保管物を出し入れする作業負担を回避するとともに装置全体の部品点数増大を回避し、さらに災害時に保管物を保護する移動棚装置を提供することである。
【解決手段】複数のカム溝131A、131B、131C、131D、131Eのそれぞれが、第1カム溝部分131A1、131B1、131C1、131D1、131Eとガイドレール110、110の長手方向Lに斜交する第2カム溝部分131A2、131B2、131C2、131D2、131E2と第3カム溝部分131A3、131B3、131C3、131D3、131E3とから構成されている移動棚装置100。
(もっと読む)
走行車
【課題】所定の停車位置に対する走行車がずれて停止した場合に、停止ポイントへのリトライ動作を効率よく行う。
【解決手段】スタッカークレーン3は、走行台車23と停止制御部55とを備える。停止制御部55は、所定の停止ポイントに対する走行台車23の停止位置がずれたかどうかを判断する。停止制御部55は、走行台車23の停止位置がずれている場合に、走行台車23を停止ポイントから離間させ停止ポイントへ接近させるリトライ動作を制御し、リトライ動作ごとに停止ポイントからの走行台車23の離間距離、停止ポイントに対する走行台車23の離間方向及び停止ポイントに対する走行台車23の接近速度のうち少なくとも一つを変更させる。
(もっと読む)
物品収納設備
【課題】収納部の適正位置に物品を迅速に移動させる物品収納設備を提供する。
【解決手段】移載装置本体28a側の引退位置とその移載装置本体28aから物品収納体3が位置する外方側に突出する突出位置との間で出退移動自在な出退移動体28cを備えた出退式の移載装置14にて構成されている物品収納設備であって、物品1の搬入部又は収納部から物品1を取り出して別の収納部に収納する場合に、物品1を取り出す際に、移載装置14の出退移動体28cに物品1を搭載しつつ、突出位置から引退位置に引退移動させた場合に、移載装置本体28aに対する物品1の存在位置P1について、出退移動体の出退方向での適正位置Pからの位置ずれ量Eが検出され、その取り出した物品を別の収納部へ収納する際に、その検出された位置ずれ量Eに応じて引退位置から突出位置に出退移動体28cを突出移動させる突出移動量を調整して収納部の適正位置に物品を収納する。
(もっと読む)
制御方法、プログラム、記録媒体、及び、制御装置
【課題】複数の固有振動数が生じる場合において、運ばれる物体に移動装置の振動に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供する。
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
(もっと読む)
移動駆動ユニットの動きを調整するシステムおよび方法
【課題】一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法を提供する。
【解決手段】一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法が、第一の移動駆動ユニットから、第一の方向に動くために第一の経路セグメントの使用を要求する予約要求を受信する段階を含む。本方法はさらに、前記第一の経路セグメント上に第二の移動駆動ユニットが現在位置されていることを判定する段階と、前記第二の移動駆動ユニットが前記第一の方向に動いているかどうかを判定する段階とを含む。さらに、本方法は、前記第二の移動駆動ユニットが前記第一の方向に動いているのではないと判定するのに応答して、前記予約要求が拒否されることを示す予約応答を送信する段階を含む。本方法はまた、前記第二の移動駆動ユニットが前記第一の方向に動いていると判定するのに応答して、前記予約要求が承認されることを示す予約応答を送信する段階を含む。
(もっと読む)
移動体及びその移動方法
【課題】
移動体の消費電力のピーク値を小さくする。
【構成】
移動体は、水平移動用の水平移動モータと昇降用の昇降モータとを備えている。From位置からTo位置への1回の移動で、移動の開始時に水平移動モータを加速動作させると共に昇降モータを下降動作させて回生電力を発生させ、移動の終了時に水平移動モータを減速動作させて回生電力を発生させると共に昇降モータを上昇動作させる。
(もっと読む)
保管及び取り出しシステム
【課題】個々のケースユニットを効率的に保管して取り出すための保管及び取り出しシステムを提供する
【解決手段】取り出し通路130A、取り出し通路内に配されている保管場所、及び少なくとも1つの搬送デッキ130Bを有する保管レベルの垂直アレイと、非収容ケースユニットを受け取る保管レベルの垂直アレイへかつそこから非収容ケースユニットを搬送するマルチレベル垂直コンベヤシステム150A、150Bと、保管レベルの各々に配置されて、保管場所の各々とマルチレベル垂直コンベヤシステム150A、150Bとの間で非収容ケースユニットを搬送する少なくとも1つの自立搬送装置110と、搬送デッキ130B及び取り出し通路130Aを通って保管場所のうちの所定の1つに達する主アクセス経路を生成し、かつ主経路が通過不可能な場合に保管場所のうちの当該所定の1つに達する副経路を生成するコントローラ120とを含む。
(もっと読む)
物体移動装置
【課題】フォロワ台車に地面に対する走行車輪の滑り等による運動誤差が生じた場合でも、物体を目標位置まで確実に搬送し得る物体移動装置を提供する。
【解決手段】リーダ台車Aとフォロワ台車Bを物体の重心における制御点回りにインピーダンス制御し、リーダ台車Aに与えられる目標軌道に基づくフォロワ台車Bの目標軌道を該フォロワ台車Bにも与え、フォロワ台車Bに搭載された軌道センサを用いて算出したフォロワ台車Bの位置・姿勢と実空間における位置・姿勢との運動誤差を推定し、該推定される運動誤差を修正しながらフォロワ台車Bを移動させるよう構成する。
(もっと読む)
移載装置
【課題】 荷物の種類に応じて荷物の適正な位置にフックを当てて荷物を移載することが可能な移載装置を提供する。
【解決手段】 移載装置1は、進退部材2、フック3、旋回駆動源4、および旋回制御手段5を備える。進退部材2は、荷物Wの移載経路Kyを挟む両側のうちの少なくとも片側に設けられ、移載経路Kyに沿って進退する。フック3は、進退部材2に移載経路Kyと直交する平面上で旋回可能に設けられ、移載経路Ky上に張り出して荷物Wに引っ掛かり可能な引掛用位置および移載経路Kyから退避した退避位置に位置変更可能である。旋回駆動源4は、フック3を正逆に旋回駆動する。旋回制御手段5は、荷物Wの種類に応じて引掛用位置におけるフック3の旋回角度を変更するように旋回駆動源4を制御する。
(もっと読む)
1 - 20 / 154
[ Back to top ]