
Fターム[3F027FA01]の内容
Fターム[3F027FA01]の下位に属するFターム
Fターム[3F027FA01]に分類される特許
1 - 20 / 70
コンベヤベルト装置
異常検出機能付き搬送装置用軸受ユニットおよびコンベア設備
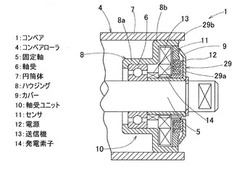
【課題】 センサ,電源,配線系の構成が簡素で、集中管理が行い易く、軸受の的確な異常検出に貢献できる異常検出機能付き搬送装置用軸受ユニットを提供する。
【解決手段】 転がり軸受6をハウジング8内に設置してなり、コンベア1等の搬送装置に装備される搬送装置用軸受ユニット10に適用する。軸受6の状況を検出するセンサ11と、このセンサ11で検出した情報を無線送信する送信機13と、環境エネルギによって発電する発電素子14を有する電源12とを設ける。前記発電素子14としては、振動発電素子や熱発電素子を用いる。コンベア1におけるコンベアローラ4や、プランマブロック等に適用する。
(もっと読む)
生産設備および生産システム

【課題】生産ラインの構築および構成変更時のプログラム作成および修正の必要がなく、柔軟に切り離しおよび組み替えが可能な生産設備および生産システムを提供する。
【解決手段】生産設備1と生産設備1aの間でワークを授受する際に、ワーク搬送の協調に必要な情報およびワークに対する作業の動作制御に必要な情報を連携情報として生産設備1と生産設備1aとの間で授受する。作業制御手段4は他の生産設備1aから移動してきたワークに対する自生産設備1の作業を、同じく他の生産設備1aから取得した連携情報を用いて制御する。
(もっと読む)
バケットエレベータ内部の結露または粉体の付着を予測及び検出する方法及び装置とそれに用いられる測定ユニット
【課題】高価な購入品、複雑な制御を必要とせず、簡便なセンサと制御で、バケットエレベータ内部への搬送物の堆積、付着量の増加を予測、検知する技術を提供する。
【解決手段】バケットエレベータ8のケーシング9にセンサユニット4を設置する。このセンサユニット4は、内部の水分値を測定する水分測定手段と、雰囲気温度を測定する雰囲気温度測定手段と、大気温度を測定する大気温度測定手段とを備える。また、粉体を搬送するための駆動手段の電流値を測定する電流値測定手段を設け、これらの水分値、雰囲気温度、大気温度及び電流値の関係から、結露や粉体の付着の有無を判断する。
(もっと読む)
コンベヤのアキューム量検出方法および装置
【課題】びん等の容器が溢れた状態でアキューム量を検出するのではなく、搬送される容器間に余裕があってもアキューム量が検出できて、アキューム量に応じたコンベヤの運転制御ができ、また、びん等の容器への傷付きを押えることができるコンベヤのアキューム量検出方法および装置を提供する。
【解決手段】びん等の容器Pをチェーン等の搬送体で搬送するコンベヤライン10におけるコンベヤ11のアキューム量検出方法において、前記チェーン等の搬送体を支持するレール2に貼付したひずみゲージ3によってレール2のひずみ量を検出することにより、コンベヤ11上の容器Pのアキューム量を推定するようにしたことを特徴とする。
(もっと読む)
コントローラ、ローラコンベア装置、ローラコンベア装置の制御方法、ならびにプログラム作成支援プログラム
【課題】構成部品の削減が可能であり、制御方法の自由度を向上可能なコントローラ、ローラコンベア装置、ローラコンベア装置の制御方法、ならびにプログラム作成支援プログラムを提供する。
【解決手段】モータを有したローラコンベア装置を、制御可能なコントローラであって、モータ制御基板を有し、モータ制御基板は、ロジック内蔵ドライバ14と、書き換え可能なメモリ16と、CPU16とを有する。CPU16と、書き換え可能なメモリ16とを有したモータ制御基板は、略コンピュータである。よって、PLC等の外部の制御装置、ならびにPLCを収納する制御盤を削減できる。
(もっと読む)
ローラの劣化状態判定方法
【課題】ローラが組み込まれる装置の稼働中において、ローラ又はその軸受等に決定的な問題のあるローラのみを特定し、未だ正常に使えるローラ以外の、交換すべきローラのみを交換することができるローラの劣化状態判定方法を提供する。
【解決手段】複数のローラが組み込まれる装置における複数のローラの側面に、被監視部として該ローラの回転数の変化に応じて見え方が変化する色彩及びパターンを付す被監視部作成手順S10と、装置の稼働中における複数のローラの回転時に、各ローラの前記被監視部の変化パターンを監視及び比較することにより標準の回転数を下回るローラを特定し(S101)、該特定したローラの発熱異常を判定する判定手順(S102)と、を備える。
(もっと読む)
配管詰まり検知装置及び配管詰まり検知方法
【課題】投入物の流量、質の変化によらず、安定して配管の詰まりを検知できる検知装置を提供する。
【解決手段】本発明の配管詰まり検知装置1は、ごみ焼却炉2の投入配管3に設けられたものであり、この配管詰まり検知装置1は、配管の管壁に取り付けられた複数の振動センサ7A,7B,7Cと、この複数の振動センサ7A,7B,7Cにより検出された振動がそれぞれ異なるタイミングで低減した際に、配管に詰まりが発生したと判定する判定部8とが備えられている。振動センサ7A,7B,7Cにより検出された振動加速度(振動波形)は、運転パラメータにより変化する閾値L及び検知時間Tを用いて、その閾値Lよりも高い振動加速度をその検知時間T内に計測した衝撃振動回数nとして判定部8で用いられる。検知時間T及び/又は閾値Lは投入物の状態に応じて閾値変更部24で変更される。
(もっと読む)
熱処理を受ける被搬送製品のためのベルトコンベアおよび方法
熱処理プロセスを通して連続的に製品を搬送するセンサ搭載コンベアベルトを含む環境制御されたコンベアシステム、およびセンサの瞬間位置を特定する方法に関する。温度センサまたは他のセンサはコンベアベルトの幅にわたって、その長さに沿って組み込まれ、殺菌装置トンネルを通るような熱処理プロセスを通る製品と共に進行する。センサの測定結果は、システムをモニタまたは制御するためにベルトから遠隔システムコントローラに無線送信される。環境またはベルトの状態を測定するセンサからのデータを用いてセンサの瞬間位置を特定し、センサのデータをセンサ位置と連動させる。 (もっと読む)
ベルト脱索防止システム
【課題】ベルトコンベアのベルトの脱索、破損を事前に回避できるシステムを提供する。
【解決手段】搬送物をベルトコンベア2に投入する投入コンベア1と、投入された搬送物を搬送するベルトコンベア2と、各種の制御盤3A,3Bと、演算処理装置4によって構成する。ベルトにはベルトの張力を計測できるベルト張力計測装置6と、ベルトの積載量を測定するズリ積載量計測装置61,7を設置する。制御盤3A,3Bとしてベルトコンベア2の移動速度を制御するベルトコンベア制御盤3Aと、投入コンベアの駆動量を制御する投入量制御盤3Bを設置する。
(もっと読む)
コンベヤベルトの摩耗状態検出装置
【課題】簡単な構成で、コンベヤベルトの摩耗状態を正確に検出することができるとともに、摩耗が進行した状態でもコンベヤベルトの摩耗状態を精度よく検出する。
【解決手段】コンベヤベルト1内に、その進行方向と厚さ方向との両方に対して傾斜する傾斜ゴム磁石11とコンベヤベルトの厚さ方向と垂直な面内に延長しその中心が上記傾斜ゴム磁石11の基端に対抗する位置に配設された平板磁石12とから成る摩耗検知用磁石13を埋設するとともに、上記平板磁石12から所定距離離隔して当該コンベヤベルト1の厚さ方向と垂直な面内に延長する基準磁石14を埋設し、上記コンベヤベルト1の表面1a側に配置された磁気センサ15にて、上記摩耗検知用磁石13からの磁界変化のピークと上記基準磁石14からの磁界変化のピークとを検出し、上記2つのピークの時間間隔から、当該コンベヤベルト1の摩耗状態を検出するようにした。
(もっと読む)
リンクコンベアチェーンの伸び測定装置
【課題】センサの設置が簡単であるとともに、伸び量の測定精度を高めることができるリンクコンベアチェーンの伸び測定装置を提供することを課題とする。
【解決手段】センタリンク2とサイドリンク3とが交互に連結されたリンクコンベアチェーン1の伸び測定装置10であって、センタリンク2の特定部位を検出する基準センサ20と、この基準センサ20が特定部位を検出したときに、前後に配置された二体のセンタリンク2,2に一方から光を照射し、二体のセンタリンク2,2の間から他方に通過した光を受光する幅センサ30と、予め設定された基準の受光量と幅センサ30が検出した受光量との誤差量を算出する制御装置40と、を備えている。
(もっと読む)
コンベヤベルト
【課題】多数のローラーを備えるベルトコンベヤ装置において、ベルトコンベヤ装置のコスト上昇や検出ユニットの故障の頻度を抑制しつつ、それぞれのローラーの不具合を確実に検出できるコンベヤベルトを提供する。
【解決手段】本発明に係るコンベヤベルト1は、複数のローラー10と、ローラー10の状態を検出する検出部110と、検出部110と接続され、検出部110からの出力信号を処理する処理部120とを備える。処理部120が取り付けられる取付部7を有する。取付部7は、コンベヤベルト1の幅方向端部5に設けられる。
(もっと読む)
コンベアの駆動制御装置
【課題】誘導電動機に適正な給電制御を行うことにより、コンベア本体の簡易で効率のよい駆動制御が可能であり、また機能の異なるコンベア本体に対しても簡易かつ安価に対応が可能なコンベアの駆動制御装置を提供する。
【解決手段】金属の切削加工により生じたチップを搬送するコンベア本体13において、チップの詰まりが生じたとき、誘導電動機12に負荷が加わりその駆動電流が増加して、電流検出器の検出値が限界電流値以上になったとき、マイクロコンピュータにより限界電流値以上と判定されてインバータによる誘導電動機12への給電を停止させ、さらに所定時間後にインバータにより反転モードで給電を行わせ、誘導電動機12を反転させる。これにより、チップコンベア本体13に詰まったチップの詰まりを除くことができ、コンベアの回転力を最大限に活用しつつ誘導電動機12の焼損等の不具合を適切に回避することができる。
(もっと読む)
保持手段駆動装置、その制御方法、及び制御プログラム
【課題】電子部品と工程処理機構の処理位置とが適切かつ良好に接触することが可能な電子部品保持手段の保持手段駆動装置、その制御方法及び制御プログラムを提供する。
【解決手段】制御装置1405は、サーボモータ1403を駆動源として操作ロッド1401を下方駆動させることで、吸着ノズル1101に保持された電子部品3が駆動制御パターンに記憶された動作を実行する位置に到達し、この際の駆動電流を検知する。その後、当該サーボモータ1403の駆動電流値が上昇し始め、当該駆動電流値は電子部品3に加える適切な荷重に相当する所定の基準値に達する。この電流値の状態を、制御装置1405は、サーボモータ1403による操作ロッド1401の下方駆動が適正に行われている、すなわち、適切に電子部品が工程処理と接触していると判断する。
(もっと読む)
コンベヤベルトのモニタリングシステム
【課題】集音マイクが、ガイドローラの回転音を収集する際に、搬送物やガイドローラにより破壊される可能性が低いコンベヤベルトのモニタリングシステムを提供する。
【解決手段】集音マイク2は、コンベヤベルト1の耳部(ベルト幅方向端部)に集音部をベルト幅方向外向きにして埋設されており、コンベヤベルト1の走行時にガイドローラの回転音を連続的に検出する。解析ユニット3は、コンベヤベルト1の走行時に集音マイク2からの信号を解析する。ガイドローラが回転不良となった場合には、回転音に変化が生じることから、この音を収集し、解析することでその周波数変化により、ガイドローラの回転不良を特定することができる。
(もっと読む)
スクリュー駆動搬送装置
【課題】構成を簡素化しつつ、搬送体がスクリュー軸を円滑に乗り継ぐことができ、高速に連続して搬送することができるスクリュー駆動搬送装置を提供することである。
【解決手段】搬送体120の係合部がスクリュー軸110の螺旋溝130に係合して搬送されるスクリュー駆動搬送装置において、スクリュー軸110が搬送方向に複数直列に配置され、それぞれのスクリュー軸110の駆動手段130が隣接するスクリュー軸110と回転速度及び回転位相を電気的に同期させる同期制御手段を有するように構成されていること。
(もっと読む)
無人車の搬送システム
【課題】複数のシステムの走行路の一部が共用化された共用エリアを有する無人搬送システムにおいて無駄な走行指示をなくすことができる無人車の搬送システムを提供する。
【解決手段】Aシステムに連結されるとともにAシステムにおける無人車の走行路の一部とBシステムにおける無人車の走行路の一部とが共用化された共通エリアを有している。地上制御盤50は、共用エリアでの荷置き作業が終わった全ての無人車をAシステムのホームステーションに回送する。また、地上制御盤50は、共用エリアでの荷置き作業が終わった全ての無人車について、Aシステム用の無人車であるかBシステム用の無人車であるかをリセットした後に、新たにAシステム用またはBシステム用のどちらかに割付ける。
(もっと読む)
複合コンベア装置、複合コンベア装置の合流制御方法、およびコンピュータプログラム
【課題】待機ワーク数を支流コンベア間で平均化し、待機状態のワークによる上流側への影響を抑制し、合流待ち時間を抑制した搬送効率の高い複合コンベア装置、複合コンベア装置の合流制御方法、およびコンピュータプログラムを提供する。
【解決手段】複合コンベア装置1は、ワークWcをそれぞれ搬送する複数の支流コンベア10(支流コンベア10−1、支流コンベア10−2、・・・、支流コンベア10−m)と、支流コンベア10によって搬送されたワークWcを支流コンベア10に対応させたそれぞれの合流位置CP(合流位置CP−1、合流位置CP−2、・・・、合流位置CP−m)で合流させて搬送する本流コンベア20と、支流コンベア10から本流コンベア20へのワークWcの合流を制御する合流制御部30とを備える。
(もっと読む)
搬送制御装置及び搬送制御方法
【課題】被搬送物の搬送先の負荷が高くなった場合にも、処理装置の総体としてのタクトタイムの短縮を図り、また、枚葉搬送ラインにおいても、演算処理を要するデータ量を増大させず、大掛かりな演算処理装置が不要で、演算処理時間が長くならない搬送制御装置を提供する。
【解決手段】処理設備の各搬送装置を制御する制御手段2は、上位システムから仕分け条件を受信し、この仕分け条件に基づいて仕分け情報を生成し、生産ロットが開始済みであるかを判別し、開始済みであれば、処理設備の被搬送物の搬出ポートのうち、空の搬出ポートがあるか否かを判別し、生産ロットが完了済みであるかを判別し、優先度の高い仕分け条件があるかを判別し、生産ロットが完了済みであり、空の搬出ポートがあれば、優先度の高い仕分け条件にしたがって、搬出ポートに仕分け情報を割付け、この仕分け情報にしたがって、搬送装置3−1,3−2,・・・3−nを制御する。
(もっと読む)
1 - 20 / 70
[ Back to top ]