
Fターム[3F072GD05]の内容
Fターム[3F072GD05]の下位に属するFターム
パレット(台板)を含むもの (10)
Fターム[3F072GD05]に分類される特許
1 - 20 / 44
物品処理装置
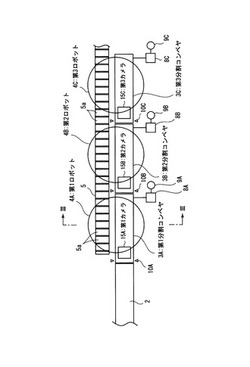
【解決手段】 直列に配置された分割コンベヤ3A〜3C毎にそれぞれロボット4A〜4Cが設けられている。各ロボットは各分割コンベヤに供給された物品を、例えば10本を一まとめとしてバケットコンベヤ5の1つのバケット5a内に受け渡すことができるようになっている。各分割コンベヤは、搬送コンベヤ2から多くの物品が供給されている状態ではそれぞれ連続して運転されているが、各分割コンベヤへの物品の供給がなくなると停止されるようになっている。各分割コンベヤは、物品が新たに供給される都度間欠的に運転され、それによって各分割コンベヤ上に所定数の物品を貯溜させるようになる。各割コンベヤ上に所定数の物品が貯溜されたら、該物品は一まとめとしてバケット内に受け渡される。
【効果】 各割コンベヤ上に所定数の物品を貯溜することができるので、各ロボットによる所定本数ずつの処理を効率的に行える。
(もっと読む)
把持装置及びワーク搬送装置

【課題】重ねられ通気性を有する板状ワークであっても確実に把持し得る把持装置及びワーク搬送装置の提供。
【解決手段】板状ワークの一方の面側に対向可能な対向面11及び該対向面11に対し該対向面11の面直方向に突出すると共に該対向面11に沿う所定方向に近接離間可能な一対の爪部12を備える把持部10と、板状ワークの一方の面側に対向面11が当接したか否かを検出する第1検出部20と、を有し、第1検出部20は、板状ワークの一方の面側に当接可能な大きさの板面21aを備えて、該板面21aが、対向面11と同一面上に位置する第1の位置と、対向面11から面直方向に突出した第2の位置と、の間において移動可能な板状部材21を有する把持装置1を採用する。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】複数のカメラ3a,3bが、コンベアの搬送路上の異なる領域をそれぞれ撮像し、制御装置5が、カメラ3a,3bによって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、ワークの保持動作を、カメラ3a,3bによって撮像される領域ごとに対応付けられたロボット2a,2bに対して指示する。
(もっと読む)
PTPシート搬送装置
【課題】PTPシートの搬送時間を短縮できると共に、十分な受渡し時間を確保することのできるPTPシート搬送装置を提供する。
【解決手段】PTPシート搬送装置11は反転装置12を備え、反転装置12にはハウジング16の周囲に90度間隔で固定クランプ装置21Aと可動クランプ装置21Bとが1つおきに交互に設けられている。反転装置12は、可動クランプ装置21Bの回動軸18の傘歯車26と、ハウジング16の駆動軸14と同心で回転可能に設けられ、傘歯車26に噛合される傘歯車27と、傘歯車27の回転及び停止を駆動制御する駆動制御機構とを備えている。そして、受取り区間や第1受渡し区間等に可動クランプ装置21Bが在る場合においては、傘歯車27をハウジング16と同期して回転させることにより、可動クランプ装置21Bが回転軸18の軸線回りに回転しない構成となる。
(もっと読む)
補助作業具
【課題】ロボットバンドを利用して食製品の上部にゴマなどの添え物を載置するなどの補助作業を行う補助作業具を提供する。
【解決手段】食製品5を保持自在なロボットハンド19に装着して補助作業を行うための補助作業具であって、食製品5に対して補助作業を行う補助作業部123Aを一端部に備えた補助作業具本体113の他端部に、ロボットハンド19に備えた複数の保持部材63A〜63Fによって把持される被把持部117を備え、この被把持部117は弾性部材によって構成してあり、前記被把持部117の上面に、ロボットハンド19に備えたエアー噴出口97と接続自在なエアー接続部121を備えている。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 一時保持装置40は、箱検知器66が箱詰め位置Pに箱が位置したことを検知しない限り、第3及び第4の羽根車41、42のある一対の羽根上に投下装置20から投下された物品を受け取って保持し、箱検知器66が箱詰め位置Pに箱が位置したことを検知すると、該第3及び第4の羽根車41、42のある一対の羽根上に保持した物品を投下するよう構成されている。
(もっと読む)
箱詰め装置
【課題】簡単かつ安価に製造することができるとともに、収納箱内における物品の整列状態を安定させることができる箱詰め装置を提供する。
【解決手段】箱詰め装置は、一対の第1羽根車60と、一対の第1羽根車60を互いに逆方向に回転させる第1回転手段とを有する第1羽根車装置42を備え、一対の第1羽根車60のそれぞれの第1羽根66は、複数の物品14のうちの1つを支持する第1支持部74と、他の1つを第1支持部74よりも供給方向の前方において支持する第2支持部84とを有しており、第1支持部74および第2支持部84は、回転軸L1に対して交差する方向において段差88を有するように2段に構成されており、第1羽根66が複数の物品14を支持する回転位置にあるとき、第1支持部74が第2支持部84よりも下方に位置する。
(もっと読む)
野菜又は青果が梱包された段ボール箱の幅検査装置及びピッキング装置
【課題】廉価で比較的確実に段ボール箱の変形や破損を検知して次行程に搬送できる野菜又は青果が梱包された段ボール箱の幅検査装置及びピッキング装置を提供。
【解決手段】野菜又は青果が梱包された段ボール箱2と、段ボール箱を搬送する搬入コンベア4と、搬入コンベアから移送された段ボール箱を所定位置に停止させる待機部10と、待機部の段ボール箱を把持するロボット13と、ロボットに把持された段ボールが積み込まれる搬送用台車15とを有するピッキング装置1及び、ピッキング装置に用いる幅検査装置5であって、待機部の前行程に一対の当接板54,56を段ボール箱の両側面4bに当接させ、一対の当接板の距離Hが予め定められた距離以上の場合には、待機部外7,8へ搬出し、未満の場合には、待機部へ搬送する判別機6を設ける。
(もっと読む)
板状ワークの分離供給設備
【課題】積み重ねられている板状ワーク群からの板状ワークの分離供給を、常に衝撃を少なくして安定して行える板状ワークの分離供給設備を提供する。
【解決手段】板状ワークAを積み重ねて保持する保持装置10と、保持装置10に隣接された送り装置20と、保持装置10の最上位の板状ワークAを送り装置20へ移す移載装置30を有する。保持装置10は、送り装置20側を下位として板状ワークA群を傾斜させて保持するとともに、板状ワークA群をワーク厚さt分だけ間欠的に上昇させるように構成した。送り装置20は滑動形式であって、保持装置10の傾斜角度θと同様の傾斜角度θの滑動上面21aを形成するとともに、この滑動上面21aに液体Wを供給するように構成した。移載装置20は、板状ワークAの上面に作用自在な吸着盤31を、傾斜方向に沿って往復移動自在にかつ昇降自在に構成した。
(もっと読む)
パレタイズされるべきパッケージの層を形成するためのシステムおよびパレチゼーションプラント
グリップヘッド(1)は、第1回転軸線(α)を中心に回転するように構成された支持要素(11)、例えば水平板を備え、前記支持要素により2つ以上のグリッパ(12)が枢動自在に結合され、各グリッパはその対称軸線(β)を中心に回転するように構成され、前記回転軸線は互いに平行であり、各グリッパの回転運動は互いに独立している。したがって、各グリッパはその対称軸線(β)を中心に回転し、かつそれらが枢動自在に結合された支持要素の回転軸線(α)を中心に旋回するように構成される。前記グリップヘッド(1)を備えた好ましいプラントは、ベルトコンベヤと、前記グリップヘッド(1)が枢動自在に結合された機械的肢部(2)とを含む。 (もっと読む)
加工機械の送込みステーション内において板状要素を位置決めする装置
本発明は、所定の中間位置に配置された板状要素(7a,7b,7c)を把持して板状要素(7a,7b,7c)を連続して位置する加工ステーション(3,4,6)中に定格走行状態で運搬するコンベヤ(8,9)を備えた板状要素の加工機械の送込みステーション(2)内において板状要素(7)を位置決めする装置であって、‐上流側位置から下流側位置に、そして下流側位置から上流側位置に交互(A)に長手方向に移動している板状要素(7a,7b,7c)を一時的に保持して板状要素(7a,7b,7c)を後側位置でピックアップし、これを中間位置に運ぶようにし、そして空の状態で戻る手段(18)と、‐定格走行状態の関数として保持手段(18)を上流側位置から下流側位置に、そして下流側位置から上流側位置に長手方向に移動させるモータ(23)と、‐板状要素(7,7a,7b,7c)の後側長手方向位置を検出して位置信号を出力する手段(27)とを有する形式の装置に関する。モータ(23)は、板状要素(7,7a,7b,7c)を後側位置から中間位置に移動させるよう保持手段(18)を検出手段(27)により出力された信号に従って上流側位置から種々の下流側位置に移動(A,Aa,Ab,Ac)させることができる。 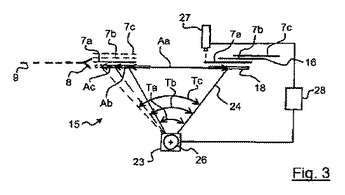 (もっと読む)
(もっと読む)
プリント基板供給装置
【課題】 プリント基板供給装置の装置本体への基板のセット作業や搬送作業を極めて簡単かつ敏速に行えるようにする。
【解決手段】 同一の寸法、形状を有する多数の基板を互いに重ね合わせてなる基板束4を縦置きすることができる基板セット部Sを装置本体内2に設けるとともに、複数個の無接触吸着パッド8を突設したL字形作動アーム7を所定の角範囲に亘って往復回動可能に設け、該作動アームと共に往復回動するそれらのパッドで基板束から基板を1枚づつ吸着分離して搬出面上へ搬送するようにする。
(もっと読む)
分離装置
【課題】本発明は半導体検査装置において半導体素子を一つずつ分離して反り問題を解決するための分離装置を開示する。
【解決手段】この分離装置は動力源、押下台、第一スウィングアームセット、第二スウィングアームセット、第三スウィングアームセット、第一グリッパーセット、第二グリッパーセット、第一プッシュブロック、第二プッシュブロック及びストップアームからなる。動力源を駆動して押下台を下降させて各スウィングアームセットを押さえ付けることによって、第一グリッパーセット、第二グリッパーセット及びストップアームで分離作業を行う。この分離装置は動力源のみを有すると共にこの動力源で各部材を動かして分離を行うので、分離速度を加速してフィードシステムの体積を縮小することができる。
(もっと読む)
パレタイジング設備の受取ステーションとパケット把持器具ならびに受取りステーションからパケット把持器具へのパケットの移転方法
【課題】簡便に製造することが可能であるにもかかわらずパケット把持器具上へのパケットの正確な位置決めが可能となる受取ステーションおよびパケット把持器具を提供する。
【解決手段】各パケット収容室(A,B)に対してキャリッジ(7)上に支承されていて作動位置と後退位置の間で移動可能なそれぞれ1つの制止要素(16,16′)を設置し、前記パケット把持器具(2)によってパケット(4,4′)を移転箇所(D)の手前側停止個所から前記制止要素(16,16′)に対して移動させその制止要素(16,16′)上に接合させることが可能なような形態で、前記制止要素(16,16′)がその作動位置において該当するパケット収容室(A,B)内に突立する。
(もっと読む)
プレス用オートパレタイザ
【課題】ロボットの必要数が少なく、サイクルタイムを大幅に短縮できるプレス用オートパレタイザを提供する。
【解決手段】プレスライン3に沿ってワーク1を一定ピッチで搬送するワーク搬送装置12と、ワーク搬送装置上で隣接する1対のワーク1をセンタリングするセンタリング装置14A,14Bと、ワーク搬送装置の幅方向に隣接しセンタリング装置14A,14Bのプレスライン方向中間位置に位置する移載ロボット16と、ワーク搬送装置の幅方向に隣接しセンタリング装置のプレスライン方向同一位置に位置するパレットステーション18A,18Bとを備える。移載ロボット16は、上流側及び下流側のセンタリング装置14A,14B上のワーク1をそれぞれのパレットステーション18A,18Bにそれぞれ上流側回り及び下流側回りで移載する。
(もっと読む)
搬送装置
【課題】電力消費量を抑えて、省電力を実現することが可能な搬送装置を提供する。
【解決手段】商品処理システム1における箱詰部6は、搬入コンベア53と、アーム部材と、制御システムとを備えている。搬入コンベア53は、商品Xを搬送する。アーム部材は、商品Xを吸引して保持するためのブロアを有し、所定の経路を移動可能に配置されている。制御システムは、搬入センサ22からの受信信号を受信してから第1所定時間が経過した時に、搬入コンベア53を停止させるように制御し、第2所定時間が経過した時に、ブロアを停止させるように制御している。
(もっと読む)
パレット積み込み装置用小包グリッパと小包をパレット積み込み方法
【課題】手動作用無しに異なった小包フォーマットと特別な小包長さに関して置換できる小包グリッパを創作すること。
【解決手段】小包グリッパは、印刷された或いは印刷されていない製品のそれぞれに少なくとも一つの小包が供給装置から受け取られてパレット上に放出され得る。小包グリッパは架台6と、第一と第二位置の間に移動できる架台に支承されたフィンガー22とを備えていて、フィンガーがストッパ42の後の少なくとも領域に第一位置に、水平作業状態におけるストッパの前の第二位置に存在する。一つのスタンプ25によりフィンガー上に載置してストッパに当接する小包が締付けできる。作業状態に存在するフィンガーの前端とストッパとの間の間隔Lが小包の異なった長さBに適合させるように変更できる。特にストッパ及びフィンガーの長さ又はそのいずれか一方が異なったフォーマットと特に小包長さBに適合させるように調整できる。
(もっと読む)
移送装置
【課題】保存箱からキャップシール装着装置へのスタック体の移送を自動化でき得る移送装置を提供する。
【解決手段】移送装置は、スタック体100を吸引保持する吸引ヘッド14や、吸引ヘッド14を移動させる移動機構、保存箱内のスタック体100の位置を検出するレーザセンサ40、移動機構等を制御する制御部などを備えている。吸引ヘッド14の先端には、スタック体100の長軸方向に並んだ複数の吸引ノズル30と、レーザセンサ40が取り付けられている。制御部は、レーザセンサ40での検出結果に基づいて、吸引ノズルが保存箱内のスタック体100に接触する位置まで吸引ヘッド14を移動させた後、吸引ノズル30でスタック体100を吸引保持させる。その後、吸引ヘッド14を移動させることで、スタック体100を移送させる。
(もっと読む)
搬送装置
【課題】動作時間の短縮、部品点数の低減、及び安定した位置決めが可能な搬送装置の提供を課題とする。
【解決手段】第1の位置T1に配置される第1の物品110を着脱自在に把持する把持手段11と、把持手段11を第1の物品110の搬送方向に対して平行な方向Xに移動自在に保持すると共に、把持手段11を上下移動させる第1の上下移動手段13を有する保持手段12と、保持手段12を第1の位置T1から第2の位置T2まで移動させる移動手段103と、第1の位置T1と第2の位置T2との間に配置され、第1の物品110が把持手段11によって把持されている状態で、第1の物品110を保持手段12に対して予め定められた位置関係となるように位置決めする位置決め手段14と、把持手段11が保持手段12に対して相対的に移動するのを停止する停止手段と、を備える。
(もっと読む)
物品移送装置
【解決手段】 ケーサ3を構成するロボット6の作業ヘッド32は、X方向に移動する12本のステー42と、Y方向に移動する3本のシャフト43とが交差する位置に連結されるとともにグリッパ33を保持する36個の保持部材35とを備えている。
上記ステーはX方向パンタグラフ機構48によって移動し、該X方向パンタグラフ機構を構成する第4〜第8支軸56d〜56hには、リンク部材55の端部同士を同一軸上で回転するように保持する同軸状態(a)と、これを離隔させた位置で回転するように保持する異軸状態(b)とに切換える第1〜第5連結手段57a〜57eが設けられている。
この連結手段により、同軸状態とした際における隣接するグリッパの間隔と、異軸状態とした際における隣接するグリッパの間隔とを異ならせることができる。
【効果】 グリッパの間隔を任意に変更することができ、多彩な収納パターンに対応することができる。
(もっと読む)
1 - 20 / 44
[ Back to top ]