
Fターム[3F072GE01]の内容
Fターム[3F072GE01]の下位に属するFターム
同速移載 (48)
Fターム[3F072GE01]に分類される特許
101 - 120 / 126
PTPシート製品・添付文書集積装置

【課題】単位時間当たりの処理数を向上させ、しかもそれに比例して設備床面積が増加しないように複数台の集積装置を回転する円板状に放射状に配設し、各作業を円板一回転中に順次実行させるPTPシート製品・添付文書集積装置を提供すること
【解決手段】複数の製品文書集積機構部10を回転する円形基板状に搭載したPTPシート製品・添付文書集積装置100であって、製品文書集積機構部10は、PTPシートを複数枚積重ねてバンド掛けしたバンド掛け品からなる製品1を、その添付文書2の一端の略半分の上に積重ねて、その製品1を両側から把持する2枚のスライド板13a、13bと、その製品1の所定外側面に添付文書2をU字形に曲げて(折り目をつけずに曲げて)捲付け、製品を把持している製品側アーム11と、その添付文書2の他端を載せた文書側アーム12とから少なくとも構成される。
(もっと読む)
多目的カートン詰機械

【課題】カートンの縦軸に沿って並置された2種類のカートンの両方を選択的に製造するためのカートン詰機械を提供する。
【解決手段】箱用のコンベヤ組立体13を有し、第一のコンベヤ19が、整列して連続的に側面で配置された個別の箱4を前記蓄積部26に送給して倒して積み重ねられた箱4のサブグループを形成し、第二のコンベヤ27が、第一のコンベヤ19によって搬送された箱4を受け取り、また、箱4を包装機14に送給するように第一のコンベヤ19に関係付けられており、コンベヤ組立体13が、第二のコンベヤ27が蓄積部26で第一のコンベヤ19に接続されて、倒して載置された箱4のサブグループの連続体を第一のコンベヤ19から受け取る第一の形態と、第二のコンベヤ27が蓄積部26の上流で第一のコンベヤ19に接続されて、整列して連続的に側面で配置された個別の箱4を受け取る第二の形態とをとる。
(もっと読む)
物品移載装置
【課題】ホルダコンベヤのチェーンが長時間の使用により伸びた場合に、簡単な調整で対応できるようにする。
【解決手段】エンドレスチェーンに取り付けたホルダに物品を保持して搬送するホルダコンベヤから、物品を取り出して所定の載置位置に移載する物品移載装置において、ホルダコンベヤのチェーンが伸びてくると第一保持手段80の支持部材84に対する取り付け位置を変更して物品を取り出す位置を調整し、この調整により中間部での物品の載置位置がずれた分は、第二保持部材82の開閉する把持部材の開閉量によって吸収するようにしたので、長時間の伸びに対して簡単な調整で対応する。
(もっと読む)
電子部品の処理装置及びその処理方法
【課題】搬送制御の高速処理及び装置の簡易化を図ることができる電子部品の処理装置及びその処理方法を提供する。
【解決手段】電子部品の処理装置1は、ダイレクトドライブモータ2により進行と停止のサイクルを繰り返しながら回転するターンテーブル3と、パーツフィーダ等の搬送手段から送られる電子部品Sを供給する供給機構4と、ターンテーブル3の円周上等間隔に配置され電子部品Sに工程処理を施す各種の工程処理ユニット5a〜5kとを備える。電気特性検査、特性分類、マーキング、外観検査等の工程処理のうち処理時間が相対的に長いマーキングユニット5f及び外観検査ユニット5iとの間にはターンテーブル3からマーキングユニット5fと外観検査ユニット5iに電子部品Sを受け渡す衛星テーブル10が設けられている。
(もっと読む)
製品梱包用の箱を取り出して立体化する装置
【課題】製品梱包用の箱を取り出して立体化するための装置として、公知の従来装置よりも速い生産速度で運転可能な装置を提供する。
【解決手段】マガジン(3)から平坦な状態の平行6面体の箱(2)を1つずつ取り出す機構(5)と箱を立体化する手段(6)とが周縁部に設けられた回転ドラム(4)と、回転ドラム(4)から次の製造ステーションに向けて立体化された箱(2)を搬送するコンベヤ(7)とを備え、コンベヤ(7)は回転ドラム(4)の回転軸と平行な回転軸を有して複数の外周台座(11)を形成する回転コンベヤ(10)を備え、取り出し機構(5)に設けられた把持・開放手段(8)によってマガジン(3)から把持された箱(2)を立体化された状態で外周台座(11)内に収容することにより、次の製造ステーションに向けて箱(2)を順に搬送する。
(もっと読む)
搬送装置及び搬送システム
【課題】
ワークWを供給部Aから搬出部Bに、搬送・整列させる多点位置搬送において、タクト時間の短縮が難しい。
【解決手段】
水平移動ブロック部10と、回転ブロック部20と、開閉ブロック部30とを具備し、前記開閉ブロック部30は開閉駆動部40と、開閉駆動部40に開閉可能に設けた一対のハンド54,55及びこれらハンドの上下動手段52,52を有する開閉移動部50とから構成してなり、一対のハンドで交互に支持したワークWを、水平移動ブロック部,回転ブロック部,開閉ブロック部の協働作用により、ワーク供給部60から搬送距離の異なるワーク搬出部70の多数の搬出ポジションにほぼ同等の時間で搬送するようにした。
(もっと読む)
厚紙の箱に製品を自動的に包装するための機械
本発明は、厚紙の箱(12)への製品(28)の自動包装機械(10)であって、ブランク(14)を形成する第1ステーション(A)と、このステーション(A)で形成された箱(12A)を外への経路に沿い製品(28)を箱詰めする箱詰め用第2ステーション(B)に向け、さらにこの箱(12C)を閉じる第3ステーション(C)に向けて搬送するための搬送装置(30)とを有する機械(10)に関する。本発明は、搬送装置(30)が、台(32)を有し、この台は、最上流側及び最下流側の位置の間を長手方向に可動に取付けられ、第1ステーション(A)から第2ステーション(B)へ形成された箱(12A)を搬送する少なくとも1つの第1の把持部(36)と、第2ステーション(B)から第3ステーション(C)へ他の詰められた箱(12B)を同時に搬送する第2の把持部(38)とを有している箱の搬送手段(34)を支持していることを特徴とする。 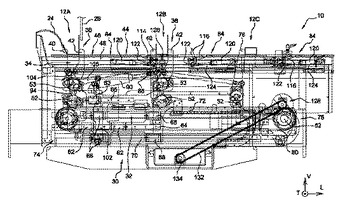 (もっと読む)
(もっと読む)
筒状物品の側面部検査方法およびその装置
【課題】筒状物品の側面部に存在する欠陥を、高精度、高速に且つ、高精度に検査できる筒状物品の側面部検査方法を提供する。
【解決手段】筒状物品としての電池3の側面部の総高以下かつ半周未満を保持し、撮像手段としての撮像素子6を介して保持部以外の側面部面を検査したのち、電池3を反転させて保持し、撮像手段としての撮像素子6を介して保持部以外の側面部面を検査することにより、電池3の側面部全域を高精度に検査する。
(もっと読む)
部品整列供給装置
【課題】
装置の簡素化によって省スペース化を図ると共に、サイクルタイムと整列精度を高め、信頼性を向上させた部品整列供給装置を提供する。
【解決手段】
前後方向で性状が異なる軸状部品を所定の方向に整列して次工程に供給する部品整列供給装置において、部品Wを送路11上に長手方向に並べて搬送する部品供給装置1と、この外周部の最終送路12に対向して配設された整列部3と、この整列部3を構成する回転ドラム4を連続的に回転駆動する駆動部と、部品Wを他の装置に搬送する搬送部6とを備え、回転ドラム4の外周面4aが円形に形成され、これに所定のピッチ間隔で放射方向に凹所15が穿設され、この中に部品Wがエアーによって強制的に導入されると共に、最終送路12に回転ドラム4から所定間隔でフード部12aが対向配置され、このフード部12aにより、所定方向以外の部品Wを払い落とすようにした。
(もっと読む)
製品集積方法および製品集積装置
【課題】高速運転可能で、確実に作動させることができる製品集積方法および製品集積装置を提供すること。
【解決手段】所定間隔で取り付けた多数の羽根部材6を備え、隣接する羽根部材6の間に製品収容部6Aが形成される無端状の回転コンベア2と、該回転コンベア2の各製品収容部6Aに1個づつ製品を供給する製品供給手段20と、N個の製品収容部6Aと少なくとも1個の空の製品収容部6Aを交互に形成する間隔形成手段30Aと、を備えた製品集積装置1を構成し、回転コンベア2および製品供給手段20を運転した状態で、間隔形成手段30Aと製品供給手段20を同期して作動させて、製品を収容したN個の製品収容部6Aと少なくとも1個の空の製品収容部6Aを交互に形成してN個単位の製品を集積して搬送できるようにした。
(もっと読む)
物品移送装置
本発明は、例えば卵や果物といった物品の流れの中から不良品を取り除く装置に関し、これらの物品は、少なくとも1列の循環コンベヤ上の適切に決められた位置に、例えばローラコンベヤのローラ上に載置するように供給され、そして、これらの物品は、搬送方向に送られて、実質的に供給コンベヤと同じ高さに配置された後続する少なくとも1列の循環コンベヤへと移送され、各物品の移送は、物品移送部材によって行われ、この物品移送部材は、移送時に2つの列の間に並ぶ移送位置をとり、不良品は、供給コンベヤの端で物品の流れから取り除かれ、物品移送部材は、駆動されて移送位置から移動される。物品移送部材は、少なくとも供給コンベヤから後続コンベヤへの製品の移送時のみ、移送位置をとり、供給コンベヤの後から後続コンベヤの前までの物品の流れにおいて、物品は物品移送部材のみと接触する。物品移送部材は、供給コンベヤと後続コンベヤとの間のシリンダドラムに設けられることが好ましい。  (もっと読む)
(もっと読む)
袋状容器の搬送装置
【解決手段】 内部に流動体の充填された袋状の胴部3と、当該胴部3より突出した口部4とを備えた袋状容器1における、上記胴部3の流動体の上方に位置するヘッドスペースを減少させるため、第7、第8回転ホイールG,Hの第1、第2保持手段24G,25Hには、それぞれ上記胴部3のヘッドスペースの位置に合わせて押圧部材81が設けられている。
第7、第8回転ホイールG,Hによる袋状容器1の受け渡し位置で上記押圧部材81は相互に接近し、これら押圧部材81によって胴部3が圧縮され、胴部3内の気体が排出されてヘッドスペースが減少する。
【効果】 効率的で安価にヘッドスペースを潰すことができる。
(もっと読む)
郵便物の送込み装置
【課題】 厚いものと薄いものが混在した状態の封書を一枚ずつ供給する場合、厚さの影響を受ける方式のものは不安定であった。郵便物処理の高速多様化に対応すべく厚さの影響を受けない方式で確実に1通ずつ高速供給でき安価で耐久性のある装置を提供する。
【解決手段】郵便物3を前下がり傾斜で重ね並べることが出来る供給コンベア1と、その最前方の郵便物3に係合して吸着搬送する吸着送込み機構2とから成り、放射状に備えた複数の吸着パッド2aが耐久性のある歯車機構で規定された軌跡に従って次々と連続的に高速送出ししていく装置である。
(もっと読む)
イチゴ自動収容方法と、イチゴ自動収容装置と、イチゴ収容容器
把持手段によりイチゴの蔓を把持し、把持手段を容器側に移動させて把持手段で把持しているイチゴを容器の上まで送り出し、把持手段が送り出されるにつれて把持手段に把持されているイチゴが容器への収容に適した姿勢となるように把持手段の姿勢を変え、その後に把持手段によるイチゴの蔓の把持を開放してイチゴを容器内に収容し、収容後は把持手段を戻し、容器はイチゴ収容時には停止させ、収容後は容器内の次の収容箇所がイチゴ収容位置に来るまで移動させ、前記把持手段によるイチゴの把持、把持手段の移動、把持手段の姿勢変更、把持手段によるイチゴ把持の開放、容器へのイチゴの収容を繰り返して、一つの容器に順次自動的にイチゴを収容する。  (もっと読む)
(もっと読む)
物品で充填された容器を連続的に荷空けする装置と方法
【課題】容器の迅速且つ簡単な荷空けと他方で既に荷空けした容器の迅速な返送とを保証する装置を創作し、容器を荷空け返送する簡単且つ迅速な方法を可能とする。
【解決手段】移送装置16に満杯容器12を供給する供給要素14並びに空容器を取り出す取出し要素15を包含し、移送装置16が旋回装置として形成され、その旋回装置は自由端20に配置された収容部21を備える旋回アーム17を包含し、下収容位置Aから上荷空け位置Eへ旋回し、旋回軸線18を中心に戻し旋回可能に形成される、物品11で充填された容器12を連続的に荷空けする装置に関し、自由端20にける収容部21は少なくとも二つの容器12を収容する少なくとも二つの室22,23 を有する。荷空け位置Eにおいて容器12を荷空けするのと同時に、既に前もって荷空けされた容器13が収容部21に導入されて、容器13が収容位置Aへの戻り旋回後に再び収容部21から取り出される一方、同時に満杯の容器12が収容部21に導入される。
(もっと読む)
機械ラインにおける装置の迅速な切り替え
機械配置は、機械ライン(102)を構成する方法で互いに協力するように配置された複数の機械装置を含む。この機械ライン(102)は、缶が前記機械ライン(102)の缶供給部(104)から缶排出部(148)へ通過し、所定の形状を呈する進路に沿って移動する際に、少なくとも、前記缶の移送、保持、操作及び形成のうちの一つを行うため、前記機械装置に関連する、及び/又は前記機械装置の一部を構成する装置(100)を含む。この装置は、第1の組の寸法を有する缶の修正に適した設定から、第2の組の寸法を有する缶に適した設定に切り替えるために必要な作業を最小限に抑える。 (もっと読む)
容器取出し受渡し装置
容器を走行中にコンベアから受部材へ受渡せる装置を提供する。
【解決手段】 定速で連続走行するコンベアのリテーナと同期して同速で並走して並走中に容器をリテーナから押し上げる押上げ体3と、押上げ体3と同時期に同期して同方向に同一速度で並走する仲介部材4と、この並走中に並走速度と異なる速度で移動して容器を上記受部材6へ受け渡す受渡し部材7とを有し、仲介部材4は上記受部材の上面とほぼ同一高レベルの上面を有しており、仲介部材4は受部材6への至近位置まで並走移動し、受渡し部材7は、仲介部材4が至近位置で、押上げ部材により容器の底面が整形部材の上面よりも若干上方にもたらされたときに、容器Pを受部材6へ移動せしめる。
(もっと読む)
スクリューキャッパ
【課題】容器4のフランジ4bに回転止め用の爪24を噛み込ませて安定した容器4の受け渡しを可能にするとともに、構造を簡素化する。
【解決手段】回転体18に設けられたキャッピングヘッド26と、容器4を吊り下げた状態で搬送するセンターガイド20と、このセンターガイド20に設けられた回転止め用の爪24とを備え、供給ホイール6から供給された容器4に、キャッピングヘッド26から荷重をかけて前記爪24をフランジ4bに噛み込ませてキャピングを行う。供給ホイール6によって容器4を移送する際にその底面を支持するプレート8の下流側に、渡り板34を設け、スプリング40によって上方へ付勢して、上昇時に前記プレート8と同じ高さになるように構成し、容器4がこの渡り板34上を移送されている間にキャッピングヘッド26によって容器4に荷重をかけて回転止め用の爪24をフランジ4bに噛み込ませる。
(もっと読む)
自動作業システム
【課題】データキャリアに対する情報の書込み或は読取りのために、搬送手段を停止させずとも済む自動作業システムを提供する。
【解決手段】データキャリアをワーク2に設け、第1および第2のロボットアーム5および8の先端部にリードライト装置を設ける。検査装置4での検査結果情報をデータキャリアに書き込む動作を、第1のロボットアーム5の先端部が検査装置4のワーク2に接近してから当該ワーク2を搬送中のパレット3上に載置して上昇するまでの間に行う。そして、ワーク2を検査結果に応じて良品収納ケース6或は不良品収納ケース7に分けて収納するために、データキャリアに書き込まれた検査結果情報を読み取る動作を、搬送中にあるワーク2に追従して移動するようになってからワーク2を把持してベルトコンベア装置1から取り出すまでの間に行う。
(もっと読む)
打こん防止ワーク投入装置及びそれを用いた打こん防止投入方法
【課題】製品運搬容器を回動させる回動角度や回動速度、ワーク投入高さ等を制御することにより、熱処理前の鍛造品や成形直後の合成樹脂製品などの表面が軟らかく傷付き易い各種成形品のワークの投入時に発生する打こんを効果的に低減することができ信頼性、汎用性に優れる打こん防止ワーク投入装置の提供。
【解決手段】成形品のワークが収容される製品運搬容器を回動自在に保持する回動保持部と、製品運搬容器を回動させる回動角度及び/又は回動速度可変な回動駆動機構と、製品運搬容器の下方に配設され製品運搬容器から投入されるワークを下流側の製品搬送部に案内するワーク受け部と、を備えている。
(もっと読む)
101 - 120 / 126
[ Back to top ]