
Fターム[3F072GE01]の内容
Fターム[3F072GE01]の下位に属するFターム
同速移載 (48)
Fターム[3F072GE01]に分類される特許
81 - 100 / 126
シート状部材の移載方法及びその装置
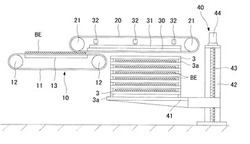
【課題】コンベアからトレイにシート状部材を短時間で移載することができ、または、トレイから巻付ドラムにシート状部材を短時間で移載することのできるシート状部材の移載方法及びその装置を提供する。
【解決手段】コンベア10の上方に設けられた無端状ベルト20にコンベア10のベルト部材BEが吸着され、無端状ベルト20によってベルト部材BEがトレイ3の上方に搬送されるとともに、磁石30の吸着が解除されることにより、コンベア10からトレイ3にベルト部材BEが移載されることから、ベルト部材BEをコンベア10によって無端状ベルト20側に搬送するだけでベルト部材BEをコンベア10からトレイ3に移載することができ、ベルト部材BEをコンベア10からトレイ3に短時間で移載することができる。
(もっと読む)
充填装置

【課題】充填装置におけるタイミングスクリューの異常を検知する。
【解決手段】充填装置100は、容器10を公転させながら容器10に液体を充填する充填部1と、充填部1に容器10を供給するスターホイール2と、コンベア4によって搬送されてくる容器10をスターホイール2に供給するタイミングスクリュー3と、タイミングスクリュー3の異常を検知するセンサ14と、センサ14によって異常が検知された場合にエラー処理を実行する制御部12とを備える。
(もっと読む)
ワーク搬送装置
【課題】ワーク収納凹部内に残ったワークを外方へ確実に排出することができるワーク搬送装置を提供する。
【解決手段】ワーク搬送装置はベース2と、ベース2上に回転自在に配置され、外周にワークWを収納する多数のワーク収納凹部1aが形成された搬送テーブル1と、搬送テーブル1のワーク排出位置において、ワーク収納凹部1aの一側に配置された噴出口2bと、ワーク収納凹部1aの他側に配置されたワーク排出パイプとを備えている。ワーク排出位置Pに、ワーク収納凹部1b内のワークWの有無を検出する検出センサが設けられている。搬送テーブル1と噴出口2bは制御部20により制御され、制御部20は検出センサ5からの信号に基づいてワークWがワーク収納凹部1bから排出されない場合に、搬送テーブル1を所定距離だけ移動させて、ワーク噴出口2bからエアを噴出する。
(もっと読む)
頭部付き軸体の搬送装置
【課題】ねじが振動フィーダから回転テーブルに乗り移る際、ねじの軸部が回転テーブルの切欠き溝の縁に引っ掛かるのを防止する
【解決手段】ねじWを吊り下げる2本の平行なレール3,3を有し、そのレール3,3を振動させてねじWをレール3,3の下端3bから排出する振動フィーダ2と、レール3,3の下端3bから排出されるねじWの軸部を導入する切欠き溝8を外周に一定の間隔をおいて形成した回転テーブル1と、その回転テーブル1を連続的に回転させる駆動装置と、ねじWがレール3,3の下端3bからレール3,3の定位置まで整列しているか否かを検知するワークセンサ7と、そのワークセンサ7でねじWがレール3,3の定位置まで整列していないことを検知したときに回転テーブル1の回転速度を下げる制御部13とを有する構成をねじ等の頭部付き軸体すべての搬送装置に採用する。
(もっと読む)
電線用防水シールの供給装置
【課題】きわめて簡単な構造を用いながらも防水シールの向きを確実にかつ高速に揃えることができる防水シール供給装置を提供する。
【解決手段】第1の搬送手段10によって連続的に搬送されて来る防水シール1のうち、小径部1aが前側となって搬送された来たものが円形部材31の受取孔33に入り込んで保持され、円形部材31の回転に伴って前方に搬送されて第2の搬送手段20に受け渡される。これに対して、大径部が前側となって搬送された来た防水シール1は、払い出しピンによって排除されて第1の搬送手段10に戻る。
(もっと読む)
ワークの移載装置および移載方法
【課題】温度変化による建屋架構の伸縮等によってガイドレールが位置ずれし、ガイドレールの位置ずれによってキャリヤの位置がワークをキャリヤに移載するマニピュレータに対して相対的にずれた場合でも、精度よく、かつ短時間にワークの移載をおこなうことのできるワークの移載装置および移載方法を提供する。
【解決手段】鉛直方向に延設する昇降ガイド部材1と、昇降ガイド部材1に昇降自在に装着されたロボットアーム2と、ワーク(ドアD)を支持する支持部材26と、支持部材26とキャリヤFとの離間を計測する計測装置とがロボットアーム2の先端に取付けられてなる移載装置10である。計測装置は、複数のリミットスイッチと、キャリヤまで伸長しながら該複数のリミットスイッチをそれぞれONまたはOFFさせることで離間を計測する計測部材とから構成されている。
(もっと読む)
プラスチックボトル搬送装置
【課題】インラインボトル成形充填システムにおいて、成形直後のボトルをエア搬送路に受け渡す際にボトル同士が衝突して変形するのを防止する。
【解決手段】ブロー成形機からボトルを搬出するシステムは、回転式のボトル取り出し機によって各成形型から取り出されたボトル10がスターホイール18を介してネック式エア搬送路17に送り出される。ネック式エア搬送路17は、そのフレームFがスターホイール18と干渉しない位置に設置され、エア搬送路17の入口17aはフレームFからスターホイール18側に延長されて、上方から見たときにスターホイール18と干渉する位置までスターホイール18に接近して配置されている。
(もっと読む)
間欠動作する包装装置における製品の移送方法およびユニット
【課題】安価で容易に実施可能な間欠動作する包装装置を提供することである。
【解決手段】容器への包装装置(1)において、コンベア(13、19、25、39)上に設置されたポケット(12、22、28、42)は工程的に移送ステーション(51、55、57、59)に到達する。そこで、2つの連続する動作工程のあいだの停止期においてポケット(12、22、28、42)が移送ステーション(51、55、57、59)で捕捉されているあいだに、少なくとも1個の製品(3)を、同コンベア(13、19、25、39)上のポケット(12、22、28、42)から取り出すか同ポケットに取り込むかするほか、当該製品(3)が積み替えられる前、移送ステーション(51、55、57、59)に位置するポケット(12、22、28、42)に同コンベア(13、19、25、39)に対して動かし同ポケット(12、22、28、42)を所定の移送位置にする。
(もっと読む)
搬送物品間の分離ピッチの変更装置
動く物品の一の流れの中の複数の物品(A)間のピッチを変更するデバイスであって、複数の物品(A)の一の取り上げ(T)位置と一の解放(G)位置との間での一の主軸(X10)周りの一の軌道運動を行うよう適合し、軌道運動の速度が取り上げ(T)位置と解放(G)位置との間の経路において選択的に可変である、複数の物品(A)を搬送する少なくとも一つの部材(12)と、少なくとも一つの搬送部材(12)が前記複数の物品(A)を取り上げる吸引動作を選択的に行えるよう、少なくとも一つの搬送部材(12)に対して減圧を分配する複数の部材(18、19、20、312)と、を有し、減圧を分配する複数の部材(18、19、20、312)は、主軸(X10)周りに回転できる一の分配器(312)を有し、一の回転分配器(312)と少なくとも一つの搬送部材(12)との間には、減圧を少なくとも一つの搬送部材(12)に伝える、可撓性のパイプあるいはホース(18)が各々設置され、パイプあるいはホース(18)の可撓性により、分配器(312)と少なくとも一つの搬送部材(12)との間に、主軸(X10)に対する相対的な角度配向が可能となる、デバイス。 (もっと読む)
容器検査装置
【課題】ガイド部材が存在しても、容器側面の全範囲において傷等の欠陥の有無を確実に検出することのできる容器検査装置を提供する。
【解決手段】容器検査装置は、容器を検査区間を含む旋回経路に沿って搬送するメインロータ2と、旋回経路の外周側で該旋回経路に沿って円弧状に延び、かつ容器側面を支持するガイド装置と、検査区間での容器BTの側面画像を取得するカメラ6と、を備え、側面画像に基づいて容器BTを検査する容器検査装置1において、容器側面の、ガイド装置5が支持する位置の容器底部からの高さを、検査区間の複数地点A,Bで互いに変化させ、カメラ6を、複数地点A,Bでの容器の側面画像をそれぞれ取得する位置に配置する。
(もっと読む)
容器の搬送装置
【課題】所定の搬出位置からこの搬出位置から搬出すべき容器を確実に搬出することが可能な容器の搬送装置を提供する。
【解決手段】検査装置200の検査結果に基づいて壜BTを不良品搬出位置P2又は良品搬出位置P3から搬出する搬送装置1において、ポケットとポケットに取り込んだ壜BTを保持する保持状態及びこの保持を解除する解除状態に切り替え可能なチャック装置5とを有し、ポケットを搬入位置P1から不良搬出位置P2を経由して良品搬出位置P3まで搬送するホイールと、搬入位置P1と不良品搬出位置P2との間の解除位置P4にてチャック装置5を解除状態に切り替える保持解除部80と、解除位置P4から不良品搬出位置P2まで壜BTを案内する搬送ガイド90と、壜BTが良品と判断された場合に解除位置P4から不良品搬出位置P2に至る間でチャック装置5を保持状態に切り替える状態切替機構70と、を備える。
(もっと読む)
容器の搬送スターホイール及び容器の搬送方法
【課題】充填ラインの処理装置と搬送コンベアの間に配置される出口スターホイールに、処理装置から供給・静置される容器の底面高さ(容器の種類によって変わる)と、搬送コンベアの搬送面高さ(容器の種類によって変わらない)の差を容易に吸収し、且つ壜容器に無理な外力を与えず、円滑に受け渡しを行う容器の搬送スターホイール及び容器の搬送方法を提供する。
【解決手段】回転するスターホイールの外周上には、容器を底で支持する底板と、倒れを防ぐガイドアームから成るガイドポケットが、等間隔で複数備えられており、それぞれのガイドポケットは、ホイールの外周に接近して設けられた固定の円形ガイドバーに規制されて、容器を保持する空間を形成するとともに、当該ガイドポケットは、垂直なガイドレール及びガイドバーによって上下に案内されており、ホイールの回転に伴って旋回すると、付設されたカムフォロワーと環状カムの作用で降下し、保持した容器を低水準にあるコンベア面に搬送できるように構成されている容器の搬送スターホイール。
(もっと読む)
洗浄装置
【課題】水平に連続回転する2台のロータリー洗浄装置間で、洗浄ノズルの干渉を避ける洗浄ノズル移動手段を備えることにより、直接容器を受渡し可能とした洗浄装置を提供する。
【解決手段】連続回転する回転体の一定半径の円周上で等ピッチに支えられた倒立容器の開口部を通し、容器の内側に向かって上方に洗浄水を噴出し、容器の内部を洗浄する複数の洗浄ノズルを備えた2台のロータリー洗浄装置(洗浄装置1、洗浄装置2とする)間で、容器の間隔ピッチ速度を同調して容器を受渡しするとき、洗浄装置1の洗浄ノズルを保持する回転体の外周を駆動カムとして洗浄装置2の洗浄ノズルを移動させる洗浄ノズルの移動手段を備えることにより、洗浄ノズル間の干渉を避けるようにした洗浄装置。
(もっと読む)
ターンテーブル及びターンテーブルを含むローラコンベアを用いた搬送システムの制御方法
【課題】 ターンテーブルを含むローラコンベアを用いた搬送システムにおいて遮断された電源を再投入する際に、効率的に被搬送物の搬送を再開する。
【解決手段】 ドグ検出センサ3と補助ドグ検出センサ4とドグ5とからなる回転位置検出機構2により回転テーブル6の回転位置を検出して、フォトセンサ26によりローラ支持フレーム42上のキャリア23の存在を確認する(S1、2)。ローラ支持フレーム42上にキャリア23が存在する場合は、フォトセンサ26でキャリア23が所定の停止位置にあるか確認する(S3、4)。キャリア23が所定の停止位置に無い場合はキャリアを撤去してする(S4、5)。次に、回転テーブル6が所定の停止位置にあるか確認し(S6)、所定の停止位置に無い場合は回転テーブル6を正常位置にした後(S7)、回転テーブル6を目標位置に回転し、搬送システム1の電源を再投入する(S8、9)。
(もっと読む)
ワーク搬送装置
【課題】 トランスファープレス等におけるワーク搬送装置において、ワーク把持装置を移動させるサーボモータの故障による運転停止の頻度を低減させるとともに、保守部品の保管・管理の負担を軽減することができる装置を提供する。
【解決手段】 所定のワーク1を把持するワーク把持部15と、ワーク把持部15にそれぞれ回転可能に接続された一対のアーム7,8と、各アーム7,8のそれぞれの他端に回転可能に接続されると共に往復直線移動する一対のスライダ4,5と、一対のスライダ4,5をそれぞれ駆動する一対の駆動部17,18と、を備えるワーク搬送装置101において、一対の駆動部17,18が、それぞれ複数のアクチュエータ31A,31B,32A,32Bにより構成される。
(もっと読む)
チップ部品搬送装置
【課題】 搬送されてきたチップ部品を安定した姿勢で取り出すことができるチップ部品搬送装置を得る。
【解決手段】 チップ部品搬送装置12は、搬送テーブル30と、円盤状のターンテーブル32とを含む。ターンテーブル32に、円形に並べられた複数のキャビティ部34を形成し、ここにチップ部品20を吸引保持する。ターンテーブル32を回転させることにより、チップ部品20を円形の軌道を描くように搬送し、チップ部品取出し部でチップ部品20をキャビティ部34から取り出す。チップ部品取出し部において、搬送テーブル30に噴出孔46が形成され、噴出孔46から圧縮空気を噴出させることにより、チップ部品20をキャビティ部34から取り出す。1つのキャビティ部34に対して複数の噴出孔46が形成され、チップ部品20の重心が移動する重心移動ライン48の両側に噴出孔46が配置される。
(もっと読む)
物品の受け渡し装置
【課題】両受け渡し領域において、容器を円滑、かつ確実に受け渡すこと。
【解決手段】回転式のラベラ1の回転体3とロボット15との間に容器2を受け渡す第1受け渡し装置14を備えている。 第1受け渡し装置14は、水平面で循環走行されるタイミングベルト28と、このタイミングベルト28に等間隔で設けた保持手段を備えている。 保持手段はカム部材とカムフォロワとによって移動を案内されるようになっている。そして、各保持手段は、受け渡し領域Eで直線状に移動されてロボット15から容器2を受け取る。他方、受け渡し領域Fでは、容器2を保持した各保持手段が、回転体3の円弧状の移動軌跡に追従して移動して、回転体3側の保持手段31へ容器2を受け渡すようになっている。
(もっと読む)
ラベル装着システム
【課題】 テイクアップ部材によるラベルの受け取りタイミングを容易に調整することのできるラベル装着システムを提供する。
【解決手段】 本願発明のラベル装着システムは、ラベル生成装置4によって生成された各ラベルLを吸着して下流のラベル受渡位置K6に搬送するラベル搬送装置5と、ラベル搬送装置5によって搬送された各ラベルLをラベル受渡位置K6で受け取り、ラベル装着開始位置K2に順次搬送するラベル受渡装置6と、ラベル搬送装置5による各ラベルLのラベル受渡位置K6に搬送されるタイミングとラベル受渡装置6によるラベル受渡位置K6におけるラベルLの受取タイミングとのずれを補正するための所定の情報を入力する操作表示装置75と、操作表示装置75によって入力された情報に基づいて、切断タイミングの補正量を生成し、生成された補正量を加算若しくは減算することにより所定の切断タイミングを補正する制御装置60とを備えている。
(もっと読む)
ワーク搬送装置
【課題】ワークの搬送不良を起こすことなく効率よく搬送可能なワーク搬送装置の提供。
【解決手段】ワークをワーク処理部へ搬送して処理がおこなわれたワークを下流へ搬送する搬送手段3,6と、処理がおこなわれたワークの先端を吸着したまま搬出トレイ7まで移動する吸着移動手段9と、ワークを排出する搬出トレイ7を備え、前記吸着移動手段9は搬送手段3,6と同期した移動速度でワークを吸着したまま搬送面に沿って搬出トレイまで移動する。
(もっと読む)
ラベル貼着機における容器保持プレート回転装置
【課題】高負荷時の動作正確性を損なうことなく、騒音を大幅に減少できるようにする。
【解決手段】ラベル貼着機において、少なくも2つのホイール1によって、カム5に噛合結合されて、該カム5の案内によって生じる回転力を容器保持プレートに伝えることで、該容器保持プレートを回転させる容器保持プレート回転装置10であって、各ホイール1は、少なくとも1つの硬質部材2と、少なくとも1つの弾性体ディスク3とから構成され、かつ、該弾性体ディスク3は、硬質部材2のそれよりも大きな外径を有していて、これにより、カム5と弾性体ディスク3とが、真っ先に接触する構成となっている。弾性体ディスク3とカム5との間の接触負荷が増加するにつれて、弾性体ディスク3は弾性変形し、これにより、カム5と硬質部材2とが接触することになる。
(もっと読む)
81 - 100 / 126
[ Back to top ]