
Fターム[3F072GE01]の内容
Fターム[3F072GE01]の下位に属するFターム
同速移載 (48)
Fターム[3F072GE01]に分類される特許
41 - 60 / 126
ネジの検査装置
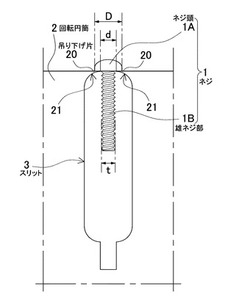
【課題】ネジの首部のネジ山を正確に検査しながら、回転円筒のネジの吊り下げ片を十分な強度として、変形などの弊害を確実に防止する。
【解決手段】ネジの検査装置は、ネジ1の雄ネジ部1Bを案内してネジ頭1Aを上面に引っかけて移送するスリット3を所定の間隔で設けている回転円筒2と、回転円筒2を回転させる回転機構10と、回転円筒2のスリット3にネジ1を供給する供給機構4と、回転円筒2で移送されるネジ1を検査する検査機構6とを備える。検査機構6は、光源7とカメラ8と演算検査器9とを備える。検査装置は、光源7の光をスリット3に透過させてカメラ8で受光し、カメラ8から出力される映像信号を演算検査器9で演算処理してネジ1を検査する。回転円筒2は、スリット上端の両側に一対の吊り下げ片20を一体構造に設けている。一対の吊り下げ片20は、その内面を、上端に向かってスリット幅を狭くするように傾斜または湾曲している。
(もっと読む)
移載装置

【課題】移載対象物の撓みを抑制すると共に、移載能率の向上を図ることができる移載装置を提供する。
【解決手段】ガラス基板を搬送するハンド装置から受け渡されたガラス基板を支持すると共に、支持したガラス基板を搬送ライン2に移載する移載装置であって、ハンド装置の移動経路上に位置し、ガラス基板を支持する支持位置と、上記移動経路上から退避する退避位置との間を、互いに独立して駆動される複数の支持装置4を有するという構成を採用する。
(もっと読む)
ワークの搬送・加工装置
【課題】高速で安定したレンズなどのワークの搬送動作を行うことのできる搬送機構を備えたレンズの搬送・加工装置を提案すること。
【解決手段】レンズの搬送・加工装置1では、第1旋回アーム11によって円弧状の移動軌跡に沿って第1レンズ搬送容器21を第1位置から第2位置に搬送し、第2旋回アーム12によって円弧状の移動軌跡に沿って第2レンズ搬送容器22を第2位置から第3位置に搬送している。剛体である旋回アーム11、12によってレンズ搬送容器22、23を搬送しているので、搬送中にレンズ搬送容器21、22が振動してそこに搭載されているレンズWa、Wbにズレが生ずることが無い。旋回アーム11、12によってレンズ搬送容器21、22を高速で移動させることができる。
(もっと読む)
ワーク移送装置およびその移送方法
【課題】 ワーク移送装置およびその移送方法において、コストを低減し、かつ作業時間を短縮するとともに省スペース化を図る。
【解決手段】 第1のワーク16を供給するワーク供給ライン15と、第1のワーク16と第2のワーク18とを組み立てた組立体19を排出するワーク排出ライン17とが互いに平行に配設されている。軸6aを回動中心として時計・反時計方向に90°往復回動するワーク移送手段10は、ワーク供給ライン15から組立ステージ20A,20Bに第1のワーク16を移送するための第1のアーム11A,11Bを有する。また、ワーク移送手段10は組立ステージ20A,20Bからワーク排出ライン17へ組立体19を移送するための第2のアーム12A,12Bとを有する。
(もっと読む)
印刷製品を引継および引渡しするための搬送装置
【課題】
比較的高い生産能率でも、後加工のために、印刷製品または予め集められた製品積層体を丁寧に送り出すことができる搬送装置を提供することである。
【解決手段】
少なくとも1つの印刷製品(6)を引継および引渡しするためのコンベア装置が、印刷製品(6)を相並べて引継領域(A)内に搬送し得る供給搬送装置(2)を有しており、かつ印刷製品(6)を引継領域(A)から、搬送装置(34)の引渡領域(B)へと搬送可能な回転する中間搬送装置(3)を有しており、かつこの中間搬送装置が、無限軌道に沿って多数の搬送要素(9)を有しており、この搬送要素によって、それぞれ印刷製品(6)がつかまれ、かつ引継領域(A)から引渡領域(B)まで搬送可能であり、かつ搬送装置(34)へと引渡可能である。その際、搬送要素(9)が、少なくとも引継領域(A)と引渡領域(B)の間では、搬送方向に対して横方向に延びる軸(27)中心にしてを制御された状態で旋回可能である。
(もっと読む)
物品処理装置
【解決手段】 モータMによって駆動される主機としてのブロー成形ライン2を構成するブロー成形機13のスターホイールHには、該スターホイールHの回転によりパルスを発生するエンコーダEが設けられており、第1〜第5サーボモータSM1〜SM5によって駆動される従機としての充填ライン3は、第2制御手段5によって上記エンコーダEのパルスに基づき制御される。
ブロー成形ライン2に異常が発生すると、第2制御手段5はエンコーダEからのパルスに代えて、仮想パルス発生部5aからの仮想パルスに基づいて充填ライン3を制御し、これにより充填ライン3の保持する容器の処理を行う。
【効果】 主機に異常が発生しても、従機を継続して作動させることが可能である。
(もっと読む)
物品処理装置
【解決手段】 充填装置1はそれぞれスターホイール等の回転体を備えた設備によって構成され、これらは第1〜第5サーボモータM1〜M5によって駆動されるとともに、充填装置の正常運転時には上記第1〜第5サーボモータは例えば第1サーボモータM1からのフィードバックパルスにより制御されている。
例えば第3サーボモータM3によって駆動されるフィラ9に異常が発生すると、制御手段14はフィラ9のスターホイールに設けた第3エンコーダE3が発生するパルスに基づいて、異常の発生していない第1、第2、第4、第5サーボモータを制御する。
【効果】 所要の設備で異常が発生しても、各設備をその異常の発生した設備に同期させて制御することができる。
(もっと読む)
スターホイール装置及びこれを備えた容器検査装置
【課題】容器周りのレイアウトの自由度が高いスターホイール装置及びこれを備えた容器検査装置を提供する。
【解決手段】複数のポケットが周方向に並べて形成され、かつ軸線AX1を中心に回転駆動されるスターホイール2と、各ポケットに取り込まれた容器Bと接触するようにして各ポケットの両側に設けられ、軸線AX2を中心に回転可能な複数のローラ3と、複数のローラ3を回転駆動するローラ駆動機構4と、を備えたスターホイール装置1であって、ローラ駆動機構4は、回転駆動源と、軸線AX2よりもスターホイール2の半径方向中心側に位置する複数のローラ3と同数の中間軸42と、中間軸42とローラ3との間にて回転を伝達するローラ駆動ベルト41と、ローラ駆動ベルト41よりも下方に配置されて、回転駆動源から中間軸42へ回転を伝達する駆動ベルト45と、を備えた。
(もっと読む)
整列移載装置
【課題】上流側のコンベヤから下流側のコンベヤ上に、前記下流側のコンベヤを停止したり間欠駆動させることなく直接に整列移載する。
【解決手段】チェーン36に支持部材11を取付固定し、サーボモータ37で回転駆動することで、整列移載ベルトコンベヤを支持する支持部材11が、搬送コンベヤ3の搬送方向Yに沿って進退移動する。このサーボモータ37は、食品の移載時には、搬送コンベヤ3の搬送速度に基づき、支持部材11の移動速度と搬送コンベヤ3の搬送速度とがほぼ一致するように回転駆動される。整列移載ベルトコンベヤ2を支持する支持部材11が、搬送コンベヤ3と同期して移動するので、先端部材が移動しながら、搬送コンベヤ3のコンベヤベルト3A上に食品を移載することで、コンベヤベルト3A上に、食品Sがコンベヤ幅方向に一列に並ぶように移載される。
(もっと読む)
ワーク移送装置
【課題】特に高さに制約がある加工機に対し、ワークの搬送、装填、取り出しを容易に達成できるようにした、ワーク移送装置を提供する。
【解決手段】第1案内枠12aと第2案内枠12bに沿って、それぞれ往復動可能に介装した第1、第2スライダ13、14を介して取付けたアーム17を、第1、第2スライダ13、14に連結した第1シリンダ15と第2シリンダ16により、傾斜移動させ、アーム他端側の把持手段20をプレス装置1に干渉しないように、楕円曲線を描くように把持したワークWを搬送させ、待機位置から加工位置に移載し、且つ取出し位置に移載する。
(もっと読む)
加工材昇降移送装置及び加工済み材昇降移送装置
【課題】プレカット加工に供する加工材を効率よく搬入し、又は加工済み材を効率よく搬出することができ、かつ、そのための装置の大型化を回避する。
【解決手段】加工材昇降移送装置は、複数本の加工材を貯留し、横移送によって1本ずつ投入コンベアへと供給するための加工材貯留装置に対して、加工材を複数本まとめて供給するための装置であって、多段多列に積み重ねられた加工材の束を載置する昇降リフトと、該昇降リフトの上方に支持され、最上段の加工材を吸着する吸着装置とを備えると共に、さらに、前記吸着装置の支持構造を、左右一方を前記昇降リフトの後方側に他方を前記昇降リフトの手前側に位置する様に斜めの配置で設置した左右の支柱と、該支柱によって支持された天井部とによって構成した。
(もっと読む)
搬送装置
【課題】搬送装置において、被搬送物と被搬送物を把持するグリップ部との互いの位置を調整可能とする。
【解決手段】搬送装置は、軌道(100)に沿って走行する走行部(210)と、走行部の下側に取り付けられており、鉛直方向に交わる表面を有する基準板(251)と、基準板に対向配置されると共に、表面に沿って回転可能なように基準板の下側に取り付けられた回転板(252)と、回転板に設けられており、被搬送物を把持するグリップ部と、回転板を前記基準板に対して回転させることで、グリップ部及び被搬送物間の位置調整を行う調整手段(255、257、258)とを備える。
(もっと読む)
保持装置およびそれを備える搬送装置
【課題】 吸着すべき複数種類の披保持体の大きさに合わせて予め配置して形成しておく必要がなく、かつ複数種類の披保持体の大きさに合わせて迅速に披保持体を保持することができる保持装置およびそれを備える搬送装置を提供する。
【解決手段】 予め定める仮想一平面に臨んで開口21Aする孔がそれぞれ形成される複数の当接部21と、各当接部21に切替えユニット14を介して、圧縮空気供給ユニット15および吸引力供給ユニット16から前記孔に圧縮気体および吸引力を選択的に供給する。圧縮空気供給ユニット15から供給される圧縮空気によって、各当接部21が枠体26の中央から周縁に向かう方向に移動し、各当接部21が披保持体の大きさに対応する位置で、前記孔に吸引力を吸引力供給ユニット16からの吸引力を供給することによって、披保持体を吸着して保持する。
(もっと読む)
飲料用容器保持装置及び該保持装置を用いた飲料容器受け渡し搬送装置
【課題】飲料容器の搬送中でも容器の姿勢を保持でき、他の飲料容器保持装置へ受け渡しが可能な受け渡し搬送装置。
【解決手段】回転体の半径方向に進退可能なアーム部材と、一対の回転軸23と、該一対の回転軸に夫々回転自在に軸支された一対のグリップアーム21とから構成され、前記アーム部材は、前記回転体内側方向にテーパ部を備え、グリップアーム21の回転軸に対して容器支持部と反対側に、アーム部材に対して対称にグリップアーム21の容器支持部が飲料容器と離接する方向に駆動させる駆動手段を設けるとともに、グリップアームにアーム部材のテーパ部を係止する突起部22bを設け、前記駆動手段によってグリップアーム21を飲料容器を支持するように駆動させて前記アーム部材のテーパ部をグリップアームの突起部22bで係止して、グリップアーム21の容器支持部及びアーム部材先端の当接部材の3点で飲料容器を支持する。
(もっと読む)
搬送システム
【課題】新たに専用の場所を設ける必要のない搬送システムを提供する。
【解決手段】搬送ライン10と、搬送ラインの上方に配置され搬送ラインに沿って搬送されるワーク20を保管する保管棚50と、搬送ラインの上方かつ保管棚の上流側または下流側に保管棚に隣接して配置され搬送ラインと保管棚との間でワークの受け渡しを行うワーク移載機構40とを備える搬送システム1であって、ワーク移載機構は、ワークの搬送方向に平行に延在して設けられるとともに、ワークの下面に当接してワークを持ち上げるアーム44、アームを昇降させる昇降手段45、アームと保管棚を搬送ラインの搬送方向に相対移動させる移動手段46とを備える。
(もっと読む)
ワークの検査装置
【課題】 検査用回転ディスクの周囲のどの位置に配置されても、ワークを脱落させたり詰まらせることなく搬送溝に確実に供給(収納)する。
【解決手段】 外周にワークCが配される搬送溝v1が形成された検査用回転ディスクID1と、検査用回転ディスクID1の搬送溝v1にワークCを供給する供給手段Fと、検査用回転ディスクID1の外周に配置される第1のガイド用ディスクG1を備え、上記第1のガイド用ディスクG1は、その外周に上記検査用回転ディスクID1の搬送溝v1を覆うガイド溝Gvが形成されて、検査用回転ディスクと同一方向に回転する。
(もっと読む)
小物部品供給装置
【課題】安定動作が可能な小物部品供給装置を提供する。
【解決手段】ナット供給装置100は、ナット300を上部可動電極200の下端部201に供給する。可動シュート6の先端部61は、上部可動電極200が上昇位置にあるときの上部可動電極200の下端部201の近傍下方に位置する。可動シュート6の先端部61は、一対の分割片62が互いに接近又は当接した状態にあるとき、上流側から送給されてきたナット300を受け止め上部可動電極200の下端部201への移し替えを可能にするナット受部(部品受部)を形成し、かつ、一対の分割片62が互いに離隔した状態にあるとき、上部可動電極200の下降201を可能にする空間を形成するよう構成される。
(もっと読む)
物品移送装置
【解決手段】 ケーサ3を構成するロボット6の作業ヘッド32は、X方向に移動する12本のステー42と、Y方向に移動する3本のシャフト43とが交差する位置に連結されるとともにグリッパ33を保持する36個の保持部材35とを備えている。
上記ステーはX方向パンタグラフ機構48によって移動し、該X方向パンタグラフ機構を構成する第4〜第8支軸56d〜56hには、リンク部材55の端部同士を同一軸上で回転するように保持する同軸状態(a)と、これを離隔させた位置で回転するように保持する異軸状態(b)とに切換える第1〜第5連結手段57a〜57eが設けられている。
この連結手段により、同軸状態とした際における隣接するグリッパの間隔と、異軸状態とした際における隣接するグリッパの間隔とを異ならせることができる。
【効果】 グリッパの間隔を任意に変更することができ、多彩な収納パターンに対応することができる。
(もっと読む)
板材搬送装置
【課題】梱包機等への板材の投入を、作業者自身の手作業でなく、自動化を可能とした板材搬送装置を提供する。
【解決手段】複数の板材1の集合体2を搬入位置Aで受ける受け台3と、受け台3に木材1を供給する供給手段4と、板材保持姿勢を維持しつつ受け台3を搬入位置Aから搬出位置Bまで搬送する搬送手段5と、搬送手段5にて搬出位置Bまで搬送された受け台3の板材1を受け取る受取手段6とを備える。
(もっと読む)
基板搬送装置
【課題】より少ないスペースで基板の適切な移載を可能とする基板搬送装置を提供する。
【解決手段】第1支持体14dがコンベア4との間で基板2の受け渡しを行うための第1位置にあるときに、昇降ユニット10が移載ユニット14を下降させ、コンベア4により搬送される基板2の下面より低い所定の下降位置まで第1支持体14dを下降させた後、移載ユニット14を上昇させることによりコンベア4により搬送された基板2をコンベア4から持ち上げる。第1支持体14dがコンベア4により搬送される基板2の上面より高い位置まで上昇した後、移載ユニット14が第1支持体14dを処理装置6との間で基板2の受け渡しを行うための第2位置までコンベア4を横断する方向に移動させ、第1支持体14dに載置された基板2を処理装置6に受け渡す。
(もっと読む)
41 - 60 / 126
[ Back to top ]