
Fターム[3F072GE05]の内容
Fターム[3F072GE05]の下位に属するFターム
中心あわせ (7)
Fターム[3F072GE05]に分類される特許
1 - 20 / 32
ワーク移載装置
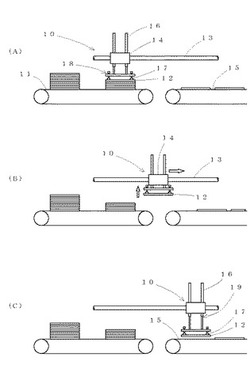
【課題】高さが変動する段積み状態のワークを順次吸着し移載することができる設定調整が簡単で、安価なワーク移載装置を提供する。
【解決手段】ワーク12を落下載置させるワーク移載装置10であって、吸着ヘッド下降当接停止機構18と、吸着ヘッド下降近接部停止機構19を有し、前記機構は、緩衝器20、支持板21、透過型センサを備え、これによる検知による信号で、エアシリンダ16の電磁弁23のソレノイドへの通電を止めるような機構からなると共に、後記機構は、エアシリンダ15に上昇端スイッチ24と、下降端スイッチ25を備え、この通電による停止と同時に吸引を解除する機構からなり、前記機構の作動中は、上昇端スイッチ24を起動させ下降端スイッチ25を停止し、後記機構の作動中は、上昇端及び下降端スイッチ24、25の通電を起動させワーク12を吸着すると共に、可動する所定位置に載置する。
(もっと読む)
ワーク移載装置

【課題】給材位置からアライメント位置に移載されるワークを、一連の移載動作に影響を与えることなくアライメントすることができるワーク移載装置を提供する。
【解決手段】ファイバーセンサー35a〜35dを有するラベルアライメント部24を設け、ロボットアーム27の先端の吸着ユニット23をラベルアライメント部24上で斜め方向にスキャンさせ、検出信号が取得されたときの座標を記憶する。ファイバーセンサー35a〜35dのうち、3点のファイバーセンサーの検出信号が取得されたら、この3点の座標に基づいて、ズレ量を求め、貼り付け座標の補正値を算出し、この補正値に基づいて、貼り付け座標を補正しながら、ラベル12をテープカートリッジ11に貼着する。
(もっと読む)
物品搬送装置
【課題】任意の間隔や向きで搬送されてきた物品を高速に搬送する。
【解決手段】物品認識手段により得た物品10の位置に関する情報に基づき、物品10を吸着する順序を定めて回転体20の回転中にアーム32を該情報に応じた回動角度で回動させて物品10を吸着具34で吸着する。物品10の向きに関する情報に基づき、物品10が載置位置Xにおいて特定の方向に向くように吸着具34を回転させて、物品10を載置位置Xを載置する。
(もっと読む)
物品の装備用機械
【課題】高い柔軟性と良好な近接性とを有する、物品の装備用の簡単かつコスト的に有利な機械を提供する。
【解決手段】少なくとも1つの回転体1と、回転体の周縁に配置された、物品40の装備用の少なくとも1つの独立したラベル貼付装置30と、物品40の位置正確な供給および搬出用の同期駆動可能な搬送要素3、4、5、6とを備える、容器などの物品40の装備用機械である。回転体1の周縁には、回転体1用の少なくともラベル貼付装置30の相対位置を決定するための要素21、22、23が存在する。
(もっと読む)
搬送装置
【課題】予め決定された軌道に沿って移動する移動部を有する搬送装置において、残留振動を抑制し、移動に要する時間を最小化することのできる搬送装置を提供する。
【解決手段】移動部2を駆動するための駆動部31とワークを載置できる負荷部32、移動部の加速時、定速時および減速時の各軌道情報を生成する軌道情報生成部5と、軌道情報生成部により生成される軌道情報に基づいて駆動部を作動させるコントローラ4とを備える。軌道情報生成部は、駆動部のエネルギ変換効率に関する効率情報記憶手段、移動部の移動に関する特有情報記憶手段、移動部の移動条件情報記憶手段、移動部の運動特性情報記憶手段、前記運動特性に基づき移動部の残留振動を抑制し、移動部の移動に要する時間を算出する演算手段と、前記演算手段により算出された移動に要する時間をパラメータに含む評価関数の値が最小となる軌道情報を決定する軌道情報決定手段とを備える。
(もっと読む)
搬送装置、チャック並びに搬送方法
【課題】整列配置の精度が高い、搬送装置、搬送装置に用いられるチャック、並びに搬送方法を提供する。
【解決手段】搬送装置1は、整列搬送機1Aと、チャック1Bとを備える。チャック1Bは、整列搬送機1Aから搬出される処理済みのタコ25が載せられるベルトコンベア19の上方に位置する。長手方向スライド部材29に沿ってスライド可能な横方向スライド部材30が、長手方向スライド部材29に取付けられており、横方向スライド部材30にチャック1Bが取付けられている。長手方向スライド部材29や横方向スライド部材30によってチャック1Bが、撮影画像で把握されたタコ25の位置に移動する。チャック1Bは、閉じた場合に先端がチャック1Bの中心軸線上に位置するよう湾曲した3本の把持爪31を有しており、タコ25の位置に移動してきたチャック1Bは、この把持爪31を閉じてタコ25を把持する。
(もっと読む)
搬送装置
【課題】被搬送物を設定された複数の特定角度に切り換えることができる搬送装置を提供する。
【解決手段】回転自在に支承された被搬送物支持具12を設定された複数の特定ロック角度でロックするロック手段27とロック解除用被操作具29が設けられた搬送用走行体1の停止位置には、ロック解除用被操作具29に対して作用するロック解除操作手段40と被搬送物支持具12の回転駆動手段41とが併設され、回転駆動手段41は、被搬送物支持具12の回転軸心と平行な方向に出退移動自在な可動台43上に軸支された駆動用回転体44を備え、この駆動用回転体44には、その偏心位置から突設された駆動ピン45とセンサー46が設けられ、被搬送物支持具12側には、駆動ピン45が嵌合可能な駆動ピン嵌合部23と、この駆動ピン嵌合部23に駆動ピン45が嵌合する以前の駆動用回転体44の回転によりセンサー46が検出できる被検出部24が設けられた構成。
(もっと読む)
異物排除装置
【課題】製造ラインで原材料を検査して異物を排除する際に、異物と共に排除される原材料の量を少なくして無駄を省く。
【解決手段】異物排除装置1は、ベルトコンベア2と、搬送される原材料Mに含まれた異物Fを検出するエックス線源4及びセンサ5を有し、位置情報検出手段6により原材料における異物の2次元の位置情報を取得する。さらにくり抜き手段9が該位置情報を受けて異物の2次元の位置に位置決めされ、下降して原材料に切り込むことにより、異物Fと異物Fの周囲にある原材料Mの一部のみを切断して除去する。
(もっと読む)
電子部品特性検査分類装置
【課題】回転する円盤に電子部品を対で順次供給し、保持させ、搬送させて検査し、検査の結果に基づき電子部品を分類する電子部品特性検査分類装置を提供する。
【解決手段】本発明の装置は、ポケット群を有し電子部品1をポケット単位またはポケット対単位で保持搬送可能な円盤7と、円盤7をポケット対単位で回転駆動する円盤駆動機構3と、ポケット対単位で前記ポケット群に電子部品1を供給する電子部品供給手段8と、検査項目数に対応して円盤7の回動域に配置されており、対の電子部品1に対応する電極ユニット4を備える検査ユニット群からなり、各電子部品の検査データを取得する検査手段と、取得した検査データに基づいて電子部品1を分類した結果に基づいて電子部品1を分類する分類装置と、円盤7に電子部品を2個同時に供給し、検査可能に駆動し、検査手段により検査データを取得させ、検査の結果に基づく分類に従って分類装置に分類させる制御装置11を含む。
(もっと読む)
物品移載装置
【課題】キャリアに収容された容器を整列状態で搬送する第1コンベヤから、複数の保持手段を備えた移載手段によって容器を保持して第2コンベヤに移載する物品移載装置において、第1コンベヤの容器に欠落があった場合に、ストック部にストックした容器を補給する。
【解決手段】検知手段18によって第1コンベヤ6上の容器4に欠落があったことを検出すると、複数の保持手段のうち、この欠落した位置の容器4を保持する保持手段を特定する。移載手段20を前記ストック部12に移動させ、特定された保持手段に容器4を保持させた後、その他の保持手段には、第1コンベヤ6上の容器取り出し位置Tに停止している容器4を保持させ、全ての保持手段に保持されている容器4を第2コンベヤ10のケース8内に挿入する。
(もっと読む)
パレタイズされるべきパッケージの層を形成するためのシステムおよびパレチゼーションプラント
グリップヘッド(1)は、第1回転軸線(α)を中心に回転するように構成された支持要素(11)、例えば水平板を備え、前記支持要素により2つ以上のグリッパ(12)が枢動自在に結合され、各グリッパはその対称軸線(β)を中心に回転するように構成され、前記回転軸線は互いに平行であり、各グリッパの回転運動は互いに独立している。したがって、各グリッパはその対称軸線(β)を中心に回転し、かつそれらが枢動自在に結合された支持要素の回転軸線(α)を中心に旋回するように構成される。前記グリップヘッド(1)を備えた好ましいプラントは、ベルトコンベヤと、前記グリップヘッド(1)が枢動自在に結合された機械的肢部(2)とを含む。 (もっと読む)
物品搬送装置
【課題】省スペースでランニングコストを低く抑えられ、高速で立体的な三次元搬送ができ、長ストロークを上下動できる物品搬送装置を提供する。
【解決手段】物品搬送装置の架台4にラック・ピニオン機構により前進又は後退する前後動部材50の基端部を固定し、前後動部材の先端部には、機械40との間でワークWを授受する上下動ローダを有する上下動部材60(Y)をスライドガイドを介して接続し、上下動部材は前後動部材を介して任意距離移動され、前工程の出口2の未加工のワークをキャリヤー10で上下動ローダの対向位置まで搬送し、キャリヤーと上下動ローダのチャックとのワーク受け渡し位置から上下動ローダを降下して、機械との間でワークを受け渡し、加工済みワークを上下動ローダにより上昇してキャリヤーに受け渡してから後工程の入口3へ搬送する。
(もっと読む)
ハンドリング装置、制御装置及び制御方法
【課題】コンベアによって搬送されている各ワークを効率のよい順番で処理することができるハンドリング装置、制御装置及び制御方法を得る。
【解決手段】ベルトコンベア2によって搬送されているワーク10を撮像して該ワーク10の位置を示すワークデータを生成する視覚センサ3と、搬送されているワーク10に対して所定の作業を行うロボット4と、視覚センサ3から送信されたワークデータを蓄積してデータベースを作成し、該データベースを用いてロボット4の位置に搬送されたワーク10に所定の作業を行うように該ロボット4を制御するコントローラ5とを備え、コントローラ5がデータベースに格納されている各ワークデータに所定の演算を行って複数のワーク10に対してロボット4が作業を行う順番を並べ替える。
(もっと読む)
整列移載装置
【課題】上流側のコンベヤから下流側のコンベヤ上に、前記下流側のコンベヤを停止したり間欠駆動させることなく直接に整列移載する。
【解決手段】チェーン36に支持部材11を取付固定し、サーボモータ37で回転駆動することで、整列移載ベルトコンベヤを支持する支持部材11が、搬送コンベヤ3の搬送方向Yに沿って進退移動する。このサーボモータ37は、食品の移載時には、搬送コンベヤ3の搬送速度に基づき、支持部材11の移動速度と搬送コンベヤ3の搬送速度とがほぼ一致するように回転駆動される。整列移載ベルトコンベヤ2を支持する支持部材11が、搬送コンベヤ3と同期して移動するので、先端部材が移動しながら、搬送コンベヤ3のコンベヤベルト3A上に食品を移載することで、コンベヤベルト3A上に、食品Sがコンベヤ幅方向に一列に並ぶように移載される。
(もっと読む)
ワーク搬送装置
【課題】投資価格を抑えて、無駄な搬送を行うことなく搬送路の全体にわたってワークを搬送することができるワーク搬送装置を提供すること。
【解決手段】ワークを搬送して複数の加工設備40a〜40dにて加工を行う生産ラインにおけるワーク搬送装置であって、ワークを把持可能なワーク把持具10a,10bと、複数の加工設備40a〜40d上に配置され、ワーク把持具10a,10bを移動可能な状態で懸架する複数のレール30a,30bとを備えるものであって、複数のレール30a,30bは、複数の加工設備40a〜40dにおける少なくとも一つの加工設備40c上に少なくとも二つのレール30a,30bの一部が重複するように配置される。
(もっと読む)
ワーク供給装置およびその供給方法
【課題】ワーク供給装置およびその供給方法において、ワーク取り入れ装置からのワークの取り入れを間断なく行えるようにし生産性を低下させることがないようにする。
【解決手段】ワーク搬送回転体2を角度α毎に間欠的に回転させ、ワーク取り入れ孔3aないし他のワーク取り入れ孔にワーク4を取り入れる。ワーク取り出し装置6では、ワーク搬送回転体2を角度2α毎に間欠的に回転させることによりワーク4を取り出し、ワーク搬送回転体2にワーク4を一時的に貯留する。ワーク搬送回転体2を逆方向へ角度2α毎に間欠的に回転させることにより、貯留したワーク4をワーク取り出し装置によって取り出し、この間に、次のワークの取り入れ準備を行う。
(もっと読む)
吸着ヘッドの駆動方法
【課題】自動分析装置のような高速処理が求められる装置に使用される吸着ヘッドを駆動方法において、吸着の成功率を高めることを目的とする。
【解決手段】負圧により反応容器31を吸着する容器ピックアップ装置21の駆動方法であって、反応容器31に対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に容器ピックアップ装置21を配置した状態で、容器ピックアップ装置21に負圧を加える第1のステップと、該第1のステップにおいて容器ピックアップ装置21により反応容器31を吸着できなかった場合には、容器ピックアップ装置21に負圧を加えた状態で、前記吸引推定領域において容器ピックアップ装置21を移動させる第2のステップと、を有することを特徴とする容器ピックアップ装置21の駆動方法。
(もっと読む)
部品供給装置及びその方法
【課題】簡単な構造でヘッドの位置を修正する機能を実現することによりフィーダからの整列した部品を所望の部品供給位置まで自動的に搬送することができる部品供給装置を提供する。
【解決手段】所定の部品吸着位置にてヘッド20に部品10を吸着して所定の部品供給位置まで搬送し、該部品供給位置にて吸着を停止して該部品を解放する部品供給装置が、該ヘッドの水平面上の運動を可能にするコンプライアンス機構22と、該ヘッドの上昇に応じて該ヘッドを該部品吸着位置に位置決めする上側位置決めユニット42と、該ヘッドの下降に応じて該ヘッドを該部品供給位置に位置決めする下側位置決めユニット52と、を含むように構成される。
(もっと読む)
保持装置およびそれを備える搬送装置
【課題】 吸着すべき複数種類の披保持体の大きさに合わせて予め配置して形成しておく必要がなく、かつ複数種類の披保持体の大きさに合わせて迅速に披保持体を保持することができる保持装置およびそれを備える搬送装置を提供する。
【解決手段】 予め定める仮想一平面に臨んで開口21Aする孔がそれぞれ形成される複数の当接部21と、各当接部21に切替えユニット14を介して、圧縮空気供給ユニット15および吸引力供給ユニット16から前記孔に圧縮気体および吸引力を選択的に供給する。圧縮空気供給ユニット15から供給される圧縮空気によって、各当接部21が枠体26の中央から周縁に向かう方向に移動し、各当接部21が披保持体の大きさに対応する位置で、前記孔に吸引力を吸引力供給ユニット16からの吸引力を供給することによって、披保持体を吸着して保持する。
(もっと読む)
搬送システム
【課題】新たに専用の場所を設ける必要のない搬送システムを提供する。
【解決手段】搬送ライン10と、搬送ラインの上方に配置され搬送ラインに沿って搬送されるワーク20を保管する保管棚50と、搬送ラインの上方かつ保管棚の上流側または下流側に保管棚に隣接して配置され搬送ラインと保管棚との間でワークの受け渡しを行うワーク移載機構40とを備える搬送システム1であって、ワーク移載機構は、ワークの搬送方向に平行に延在して設けられるとともに、ワークの下面に当接してワークを持ち上げるアーム44、アームを昇降させる昇降手段45、アームと保管棚を搬送ラインの搬送方向に相対移動させる移動手段46とを備える。
(もっと読む)
1 - 20 / 32
[ Back to top ]