
Fターム[3F072JA02]の内容
特殊移送 (6,503) | 物品の姿勢 (310) | 反転するもの(水平軸まわり) (85) | 90° (22)
Fターム[3F072JA02]に分類される特許
1 - 20 / 22
ワーク保持装置
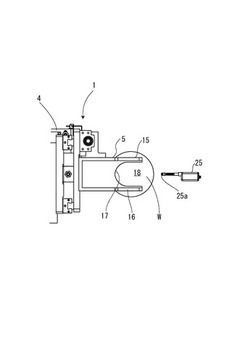
【課題】測定や加工等を行う装置に対し、ワークの受け渡しを容易に行なえるようにしたワーク保持装置を提供する。
【解決手段】円柱型のワークWの両端面を挟持し保持するワーク保持装置1であって、ワークWの両端面を挟持する一対のチャック部5,5を備える。一対のチャック部5,5の各々に対し、ワークWの端面の内側面ではなく該内側面の外側に位置する外側面のみを挟持できるようにコ字型部18を形成し、一対のチャック部5,5のコ字型部18でワークWの端面の外側面を挟持できるようにする。ワーク保持装置1からワーク測定装置19にワークWを受け渡す際、ワーク測定装置19のワーククランプ軸21,21でワークWの端面の外側面でなく内側面を挟持させ、ワーク保持装置1からワーク測定装置19へワークWを容易に受け渡すことが可能となる。
(もっと読む)
物品搬送装置

【課題】コンベヤにおける各仕切り部材の間に搬入された物品が跳ね返って収容区画外に飛び出してしまうことがなく、物品を各仕切り部材の間に確実に収容して搬送し得る物品搬送装置を提供する。
【解決手段】搬送コンベヤ1の歯付ベルト10に設けた仕切り部材11は、先端部において搬送方向前方に向けて張り出す第1案内部11bを備えており、収容区画へ搬入された物品Wの前端が、各仕切り部材11間の収容区画の底部16に到るまでに、仕切り部材11を前進移動して第1案内部11bで物品Wの重心Wpより後方を歯付ベルト10の走行方向前方へ押して物品Wの前方を仕切り部材11の移動方向後方に向けて傾動させる。
(もっと読む)
枠付き容器用物品払出し装置
【課題】払出し容器から物品を自動的に払い出すことができる払出し容器用物品払出し装置を提供する。
【解決手段】本発明は、ボックスパレット20などの枠付き容器内に積載された物品30を払い出すための物品払出し装置1において、ボックスパレットが載置される第1部分3、および、第1部分の一縁部から略垂直に延びる第2部分4からなる、傾動可能に支持された本体2と、第2部分に設けられた、第1部分の側の面を搬送面とするコンベヤ機構8と、ボックスパレットが第1部分に載置された状態で本体が払出し姿勢に傾動されたときに、ボックスパレットにおける左右の垂直側板22a、22cを支持して、ボックスパレットを固定し物品のみを払出すと共に、ボックスパレットがコンベヤ機構の搬送面と非接触状態となるようにする支持部材9、10とを備えることを特徴とする。
(もっと読む)
海苔抜取設備
【課題】ダンボール箱から海苔をキズ付けずに取り出すことができ、作業効率を向上させた海苔抜取設備を提供することを目的としている。
【解決手段】本発明の海苔抜取設備10は、海苔16が箱詰めされたダンボール箱14の上面開口と底面を上下反転させる反転手段20と、前記ダンボール箱14を可動テーブル64まで移動し、前記可動テーブル64上から前記ダンボール箱14を持ち上げる移動手段40と、前記可動テーブル64に海苔の少なくとも一部を載置面から突出させた位置に調整する昇降手段60と、空のダンボール箱14を上下反転させて外部へ払い出す払出手段80と、を備えたことを特徴としている。
(もっと読む)
仕分装置
【課題】効率良く仕分作業ができる仕分装置を提供する。
【解決手段】仕分装置1は、収納容器A内から物品Wを取り出す取出手段11と、この取出手段11で取り出した物品Wを搬送する第1物品搬送手段12とを備える。仕分装置1は、物品Wを搬送する第2物品搬送手段41と、オーダ情報に基づく数の物品Wを第1物品搬送手段12上から第2物品搬送手段41上に押し出して載せ換える押出手段46とを備える。第2物品搬送手段41上の物品Wを保持手段51のロボットハンド部で保持して出荷容器B内に投入する。
(もっと読む)
プリント基板供給装置
【課題】 プリント基板供給装置の装置本体への基板のセット作業や搬送作業を極めて簡単かつ敏速に行えるようにする。
【解決手段】 同一の寸法、形状を有する多数の基板を互いに重ね合わせてなる基板束4を縦置きすることができる基板セット部Sを装置本体内2に設けるとともに、複数個の無接触吸着パッド8を突設したL字形作動アーム7を所定の角範囲に亘って往復回動可能に設け、該作動アームと共に往復回動するそれらのパッドで基板束から基板を1枚づつ吸着分離して搬出面上へ搬送するようにする。
(もっと読む)
ボトル容器起立整列搬送装置
【課題】ボトル容器のトップ部とボトム部の向きを検出し、その検出信号に基づいて横転一列状態の各々ボトム容器の起立操作を制御して確実にボトル容器をトップ部を上にしてコンベア上に1個ずつ起立整列させて搬送できるようにする。
【解決手段】中空ボトル容器1を搬送する横転一列搬送手段2と容器を1個ずつ横転した状態で導入し受け取る受取凹部5を外周側に複数等間隔に備える回転体4と受取凹部の通過下側に受取位置から起立操作位置直前まで配置された第1容器保持板10と起立操作位置から起立搬送位置直前まで前記第1容器保持板よりも低位に配置された第2容器保持板11とを備える起立整列搬送用回転ターレット3と前記起立操作位置に受取凹部内に導入した容器の胴部下側を横転状態から起立直前状態まで支持し且つ容器導入前後方向に前進後退移動可能な支持杆6と起立操作位置直前に配置した容器向き検知部8とを備える。
(もっと読む)
部品検査装置
【課題】部品検査装置において、部品の複数の方向からの外観検査の作業効率を高める。
【解決手段】部品検査装置1は、棒状のワークを検査するための装置であって、ワークを載置して搬送可能な第1搬送ユニット12と、第1搬送ユニット12に載置されて搬送されるワークを検査する第1検査ユニット13と、第1検査ユニット13の検査結果に応じてワークを良品と不良品を選別する第1選別ユニット14とを備えている。第1搬送ユニット12は、ワークが保持される複数の溝が形成されたテーパー形状の部品載置面を有するテーパーディスク17と、テーパーディスク17を回転駆動するモータとを有している。テーパーディスク17の回転軸は鉛直方向に対して傾斜している。溝は、部品載置面上をテーパー円盤半径方向に延び両端が開いた溝であって、ワークの両端面がテーパー円盤半径方向に向くようにワークを保持可能である。
(もっと読む)
集積装置
【課題】物品のサイズに応じて搬送手段の長さが変化することにより、物品のサイズの大小に拘わらず、物品の姿勢が不安定になることなく姿勢変更手段に渡すことができる集積装置を提供する。
【解決手段】物品Mを水平姿勢で第1の方向Xに搬送する搬送手段10と、物品Mを受け取って、物品Mの側面が第1の方向Xおよび鉛直方向に沿った起立姿勢に姿勢を変更させる姿勢変更手段20と、物品Mを第1の方向Xに直交する第2の方向に重ねた整列状態となるように集合させる整列手段40とを備え、搬送手段10が第1の方向Xに伸縮可能で、搬送される物品Mの第1の方向Xの長さに応じて搬送手段10が伸縮して搬送手段10と姿勢変更手段20との間の空間の距離を変更可能であることを特徴とする。
(もっと読む)
物品方向変換装置
【課題】 多数個の小物品の方向変換を効率良くできるようにする。
【解決手段】 一方面の周縁に沿って複数個の物品の収納凹み部15が配置されてなり回転軸方向を水平として回転可能に配置される第1の円板体3と、周面に複数個の物品の収納凹み部16が配置されてなり回転軸方向を垂直として回転可能に配置される第2の円板体4とを備え、第1の円板体3に対して第2の円板体4が下側に、かつ、それぞれの周縁と周面とが互いに臨設する状態において同期回転するように配置され、同期回転に際して第1の円板体3のそれぞれの収納凹み部15内の物品40それぞれを第2の円板体4のそれぞれの収納凹み部16内に落とし込むことで物品40の方向を変換する物品方向変換装置。
(もっと読む)
搬送装置及びそれを備えた計量梱包システム
【課題】受入位置で物品を安定した姿勢で受け入れることができ、もって集積姿勢が乱れることのない搬送装置及びそれを備えた計量梱包システムを提供する。
【解決手段】受入位置P1で搬入コンベア6から供給された物品Xを受け入れて下流側の集積搬送装置12へ受け渡す受渡装置7に、受入位置P1においてほぼ水平姿勢で1個ずつ物品Xを受け入れたのち、起立姿勢方向に回動して該物品Xを起立させると共に、集積搬送装置12のバケット44に該物品Xを受け渡す受渡台24…24を備え、かつ、該受渡台24…24の載置面を櫛歯状として隙間を設ける。そして、受け入れた物品Xを該隙間を介して載置面に吸引保持する吸引機構33を備え、この吸引機構33を、吸引ポンプ34と配管35と吸引口が設けられた吸引箱36とで構成する。
(もっと読む)
間欠動作する包装装置における製品の移送方法およびユニット
【課題】安価で容易に実施可能な間欠動作する包装装置を提供することである。
【解決手段】容器への包装装置(1)において、コンベア(13、19、25、39)上に設置されたポケット(12、22、28、42)は工程的に移送ステーション(51、55、57、59)に到達する。そこで、2つの連続する動作工程のあいだの停止期においてポケット(12、22、28、42)が移送ステーション(51、55、57、59)で捕捉されているあいだに、少なくとも1個の製品(3)を、同コンベア(13、19、25、39)上のポケット(12、22、28、42)から取り出すか同ポケットに取り込むかするほか、当該製品(3)が積み替えられる前、移送ステーション(51、55、57、59)に位置するポケット(12、22、28、42)に同コンベア(13、19、25、39)に対して動かし同ポケット(12、22、28、42)を所定の移送位置にする。
(もっと読む)
搬送装置
【課題】受入位置で受け入れた複数の比較的偏平な物品を、起立姿勢で前後に集積した状態に保持して排出位置に搬送する場合に、集積工程の高速化を図ることができる搬送装置を提供する。
【解決手段】受渡装置12は、受入位置P1において所定の受入姿勢で上流側の搬入コンベア11から1個ずつ物品Xを受け入れて、起立姿勢方向に回動することにより該物品Xを起立させると共に、前方へ移動することにより集積搬送装置13に備えられたバケット44,45に前側から順に詰めつつ該物品Xを受け渡す受渡台24…24を備える。その場合、受渡台24は、受入姿勢が水平姿勢から回動方向へ角度αだけ傾斜した姿勢となるように構成される。さらに、搬入コンベア11の搬送面も、前記角度αだけ傾斜する。
(もっと読む)
搬送装置
【課題】被搬送物の傾斜角度を略90度の値に設定できる搬送装置を提供する。
【解決手段】搬送装置2は無端体7を備え、無端体7には、屈曲可能な複数の搬送体8を搬送方向に沿って並設する。無端体7の回転で移動する搬送体8に沿って固定ガイド体9を配設する。水平姿勢の容器Wは、搬送体8の屈曲に伴って略90度回動して傾斜姿勢となる。傾斜姿勢の容器Wは、側縁部を固定ガイド体9および固定板部にて支持するとともに底面部を起立状態の回動板部にて支持して搬送する。
(もっと読む)
容器処理装置
【解決手段】 ラベラ1は、容器2を保持する複数の保持手段31を有する回転体3と、両ステーションA、Bに配置したラベル貼り付け機構4,5を備えている。
回転体3の隣接位置に第1受け渡し機構14を設けてあり、さらにその隣接位置に容器2を搬送する供給コンベヤ13とロボット15を設けている。
ロボット15は、供給コンベヤ13が搬送する横転状態の容器2を吸着保持してから正立状態に起立させ、その後、受け渡し領域Eにおいて第1受け渡し機構14の保持手段26へ受け渡す。
第1受け渡し機構14の保持手段26は、受け渡し領域Fにおいて容器2を正立状態のままで回転体3側の保持手段31へ受け渡す。
【効果】 自立できない容器2であってもキャリヤを用いることなく搬送して、ラベルを貼り付けることができる。
(もっと読む)
多目的カートン詰機械
【課題】カートンの縦軸に沿って並置された2種類のカートンの両方を選択的に製造するためのカートン詰機械を提供する。
【解決手段】箱用のコンベヤ組立体13を有し、第一のコンベヤ19が、整列して連続的に側面で配置された個別の箱4を前記蓄積部26に送給して倒して積み重ねられた箱4のサブグループを形成し、第二のコンベヤ27が、第一のコンベヤ19によって搬送された箱4を受け取り、また、箱4を包装機14に送給するように第一のコンベヤ19に関係付けられており、コンベヤ組立体13が、第二のコンベヤ27が蓄積部26で第一のコンベヤ19に接続されて、倒して載置された箱4のサブグループの連続体を第一のコンベヤ19から受け取る第一の形態と、第二のコンベヤ27が蓄積部26の上流で第一のコンベヤ19に接続されて、整列して連続的に側面で配置された個別の箱4を受け取る第二の形態とをとる。
(もっと読む)
ガラス基板の移積装置及び移載方法
【課題】 スペーサをガラス基板から分離させる際に、ガラス基板の表面と摺接させることなく確実に分離し、分離・搬送動作中のスペーサの皺やたるみの発生や、摺接によるガラス基板への傷の発生を防止することができるガラス基板の移載装置を、簡易な構成でコンパクト・安価に提供する。
【解決手段】 基板搬送手段10と、スペーサ分離搬送手段20,30,40とを備え、スペーサ分離搬送手段20,30,40は、基板搬送手段10がガラス基板Gを吸着する際には、スペーサSの一辺を固定すると共に、スペーサSを分離搬送する際には、該固定辺を中心とした円軌道を描くようにスペーサSを回転させて、該スペーサSを次のガラス基板Gの表面と摺接させずに該ガラス基板Gと分離して搬送することを特徴とする。
(もっと読む)
長尺物品用荷役装置
【課題】使用可能性とハンドリング自由度が改善され、長尺物品へのアクセス条件が緩和された荷役装置を提供する。
【解決手段】同一の水平面に並列配置された少なくとも2つの物品ハンドリングユニット6から構成される少なくとも垂直方向と水平方向に走行移動可能な荷役フレーム体5を備えた長尺物品9,16用荷役装置。物品ハンドリングユニット6はそれぞれ長尺物品をハンドリングする一対の把持アーム7,8を有する把持ユニットとして構成され、把持ユニットは少なくとも間接的に水平の旋回軸周りで旋回可能に配設されている。
(もっと読む)
厚紙の箱に製品を自動的に包装するための機械
本発明は、厚紙の箱(12)への製品(28)の自動包装機械(10)であって、ブランク(14)を形成する第1ステーション(A)と、このステーション(A)で形成された箱(12A)を外への経路に沿い製品(28)を箱詰めする箱詰め用第2ステーション(B)に向け、さらにこの箱(12C)を閉じる第3ステーション(C)に向けて搬送するための搬送装置(30)とを有する機械(10)に関する。本発明は、搬送装置(30)が、台(32)を有し、この台は、最上流側及び最下流側の位置の間を長手方向に可動に取付けられ、第1ステーション(A)から第2ステーション(B)へ形成された箱(12A)を搬送する少なくとも1つの第1の把持部(36)と、第2ステーション(B)から第3ステーション(C)へ他の詰められた箱(12B)を同時に搬送する第2の把持部(38)とを有している箱の搬送手段(34)を支持していることを特徴とする。 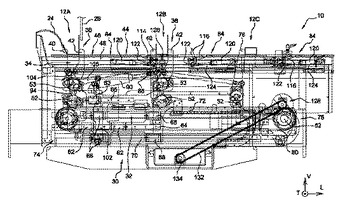 (もっと読む)
(もっと読む)
梱包用移送装置
【課題】 コンベアから梱包位置へ被梱包物を移送する際に、被梱包物が姿勢を崩したり転倒することのない梱包用移送装置を提供することを目的とする。
【解決手段】 移送体3は被梱包物Pを保持そして保持解除可能な保持部材4と、該保持部材4を水平方向に移動かつ該水平方向と水平面で直交する方向の軸線まわりに回動せしめる駆動機構5とを備え、該駆動機構による保持部材の移動軌跡Cは、被梱包物の保持後の移送工程では第一位置から曲線域C1を経て直線域C2へ移行して第二位置Yへ達し、保持解除後の戻り工程で第二位置から第一位置へ復帰し、上記移送工程における上記曲線域から第一位置から発する部分で上昇成分を有しそして直線域が下方に向いているように形成されている。
(もっと読む)
1 - 20 / 22
[ Back to top ]