
Fターム[3F072KE04]の内容
特殊移送 (6,503) | その他の移載手段、移載補助手段(その他) (378) | リフター (38)
Fターム[3F072KE04]に分類される特許
1 - 20 / 38
物品搬送装置
【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
物品移載装置

【課題】 狭いスペースでも使用できる物品移載装置を提供する。
【解決手段】 フレームと、フレームに往復移動可能に設けられた移動体と、移動体の表面側と裏面側に周回されたベルトを備え、移動体はその駆動側を縦移動させて送り出すと先端側が先方に横移動し、駆動側を縦移動させて引き戻すと先端側が横移動して引き戻され、ベルトは周回方向任意箇所がフレームに固定されてリング状であり、移動体はその駆動側が縦移動する先端側が横移動し、ベルトは移動体の先端側が先方に横移動すると同方向に繰り出されてベルト先方の物品をベルトの上に掬い上げることができ、移動体の駆動側が縦方向に引き戻されて先端側が横方向に引き戻されると、その戻り方向に引き戻されてベルトの上の物品をベルトの先方に降ろすことができるようにした。
(もっと読む)
容器搬送装置
【課題】カップ状容器2の充填装置において、サイズの異なる容器2A、2Bに兼用するための型替えを容易にする。
【解決手段】チェーン24に一定の間隔で取り付けられている容器支持手段26が、小径の支持孔26Aaが形成された第1支持プレート26Aと、前記支持孔26Aaよりも大きい支持孔26Baが形成された第2支持プレート26Bを有しており、第2支持プレート26Bは第1支持プレート26Aに対して昇降可能であり、昇降する際に位置決めピン34によって両支持孔26Aa、26Baの位置がずれないようにしている。小型の容器2Aを搬送する場合には、第2支持プレート26Bを下降させて第1支持プレート26Aに重ねて両支持孔26Aa、26Ba内に挿入する。また、大型の容器2Bを搬送する場合には、第2支持プレート26Bを上昇させてその支持孔26Baにカップ状容器2Bを挿入する。
(もっと読む)
昇降装置
【課題】搬送通路との干渉を避け、且つワークを安定して昇降させる。
【解決手段】ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、各垂直軸に個別に対応して設けられ、ワークを支持可能な複数のアームと、各アームに個別に対応して設けられ、対応するアームを垂直軸に沿って昇降させる複数の昇降アクチュエータと、複数の昇降アクチュエータを駆動制御する昇降制御部と、各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、昇降制御部より与えられる指令に基づいて各昇降アクチュエータが駆動され、揺動制御部より与えられる指令に基づいて各揺動アクチュエータが駆動される昇降装置において、アームが、垂直軸に連結されて水平面内を揺動可能な平行リンク部と、平行リンク部に連結されて水平面内を揺動可能な先端部とを有する。
(もっと読む)
旋回装置及び搬送装置
【課題】重力の影響を利用して、ワークの進行方向を変化させるとともに、ワークの垂直方向の位置を変化させることを実現可能にする。
【解決手段】シリンダ72は、弾性体73により回転連結部材77を上方向に付勢する。シリンダ72は、飛出防止機構78により係止されたワーク61の自重により弾性体73の付勢力に抗して下動し、ワーク61の自重から解放された場合には弾性体73の付勢力により上動するように配設されている。シリンダ72には、下動又は上動時の旋回を案内するリード溝91が形成されている。ガイドピン74は、リード溝72に挿入された状態を維持することで、上動又は下動しているシリンダ72を旋回させる。
(もっと読む)
システム、把持ヘッド、および、製品を移すための方法
本発明は、製品を移すためのシステムに関し、当該システムは、製品(5)を搬送方向に搬送するためのコンベア(3)を有し、かつ、該製品を該コンベアから他の位置へと移すための可動の把持ヘッド(9)を持った把持装置(7)を有し、前記把持ヘッドは、ベース(32)を有し、少なくとも1つの把持フィンガー(36)を有し、該把持フィンガーは、製品の第1の側を保持するための把持ポジションと、前記少なくとも1つの把持フィンガーを製品が通過方向に通過できる開ポジションとの間での動作のために、該ベースに可動に取り付けられており、前記少なくとも1つの把持フィンガーは、把持ポジションから開ポジションへと移動する時に、該把持フィンガーが最初に前記通過方向に該製品から遠ざかる方へ移動するように構成されている。本願発明は、さらに、把持ヘッドに関し、かつ、その把持ヘッドを用いて製品を他の位置に移す方法に関する。 (もっと読む)
ワーク反転装置
【課題】作業員の人力を介在させ、かつ装置の動作工程を集約することによって、装置の構成を簡素化したワーク反転装置を実現する。
【解決手段】ワーク表面の形状に合わせた把持体を有する一対のクランプアーム60と、該クランプアームをワークに対して把持位置又は非把持位置に動作させる回動軸52とからなるワーククランプ装置18と、該ワーククランプ装置を回動軸52の軸線を中心に反転可能に支持する昇降台46と、エアシリンダ26のピストンロッド32に設けられ該ピストンロッドの前進時に回動軸52に係合して回動軸52をワーク把持位置固定するカム42と、該ピストンロッドの前進時にカム42を該昇降台より先行上昇させ、該ピストンロッドの後退時に該昇降台を先行下降させる把持ロック機構98とを備え、ワークの昇降時にクランプアーム60を常に把持位置にロックさせるようにした。
(もっと読む)
搬送位置決め方法及び装置
【課題】周囲4面のうち例えば両側面が複雑な形状のワークに対して汎用性があり、両側面の形状が複雑な多くの機種のワークに対して汎用性がある搬送位置決め方法及び装置を提供すること。
【解決手段】搬送位置決め方法は、搬送されるシリンダブロック1の前方端部2を基準面41に対して当接させるステップS2と、シリンダブロックの側部5に設定された基準点6に対して計測器60のロッド62を基準面と平行に突き当てることにより原点から基準点までの距離を計測するステップS3と、シリンダブロックをカメラ70で撮影することによりシリンダブロックの機種を判別するステップS4と、計測された距離と判別された機種とによりシリンダブロックの中心位置を割り出すステップS5と、割り出されたシリンダブロックの中心位置にローダ30を移動させるステップS6と、を含む。
(もっと読む)
物品搬送装置
【課題】省スペースでランニングコストを低く抑えられ、高速で立体的な三次元搬送ができ、長ストロークを上下動できる物品搬送装置を提供する。
【解決手段】物品搬送装置の架台4にラック・ピニオン機構により前進又は後退する前後動部材50の基端部を固定し、前後動部材の先端部には、機械40との間でワークWを授受する上下動ローダを有する上下動部材60(Y)をスライドガイドを介して接続し、上下動部材は前後動部材を介して任意距離移動され、前工程の出口2の未加工のワークをキャリヤー10で上下動ローダの対向位置まで搬送し、キャリヤーと上下動ローダのチャックとのワーク受け渡し位置から上下動ローダを降下して、機械との間でワークを受け渡し、加工済みワークを上下動ローダにより上昇してキャリヤーに受け渡してから後工程の入口3へ搬送する。
(もっと読む)
移載装置
【課題】移載対象物の撓みを抑制すると共に、移載能率の向上を図ることができる移載装置を提供する。
【解決手段】ガラス基板を搬送するハンド装置から受け渡されたガラス基板を支持すると共に、支持したガラス基板を搬送ライン2に移載する移載装置であって、ハンド装置の移動経路上に位置し、ガラス基板を支持する支持位置と、上記移動経路上から退避する退避位置との間を、互いに独立して駆動される複数の支持装置4を有するという構成を採用する。
(もっと読む)
パレットを用いたパネルの積取装置
【課題】 パレットを用いたパネルの積取作業において、作業性の向上を図るとともに、機能的な作業空間の利用が可能なパネルの積取装置を提供すること。
【解決手段】 パネル受入部2、受け入れたパネル1を搬送するパネル搬送部3、パレット受入部6、受け入れたパレット5を搬送するパレット搬送部7、パレット5に所定数のパネル1を搭載するパネル搭載部8、およびパネル1を搭載したパレット5を搬出させるパレット搬出部10を有するパネルの積取装置において、パレット搬出部10がパレット受入部6の上方に配置され、かつ、パレット受入部6とパレット搬出部10が同一方向に対向することを特徴とする。
(もっと読む)
物体移動装置
【課題】無線通信のみによる台車相互間でのリアルタイムの情報交換を行う協調搬送とは異なり、車両等の物体を落としたりする心配がなく、複数の台車を協調制御することにより、物体を確実に且つより安定して移動させ得る物体移動装置を提供する。
【解決手段】走行駆動装置1により全方向に走行可能な台車本体2と、台車本体2に連結機構3を介して取り付けられ且つ物体としての車両4の幅方向一方の側に位置して車両4をリフトアップするリフター5とを有し、与えられた目標軌道に沿って移動可能なリーダ台車Aと、
全方向に走行可能な台車本体2と、台車本体2に連結機構3を介して取り付けられ且つ車両4の幅方向他方の側に位置して該車両4をリフトアップするリフター5とを有し、リーダ台車Aの動きを推定しつつ追従することにより、リーダ台車Aと協調して車両4を移動させるフォロワ台車Bと
を備える。
(もっと読む)
加工材昇降移送装置及び加工済み材昇降移送装置
【課題】プレカット加工に供する加工材を効率よく搬入し、又は加工済み材を効率よく搬出することができ、かつ、そのための装置の大型化を回避する。
【解決手段】加工材昇降移送装置は、複数本の加工材を貯留し、横移送によって1本ずつ投入コンベアへと供給するための加工材貯留装置に対して、加工材を複数本まとめて供給するための装置であって、多段多列に積み重ねられた加工材の束を載置する昇降リフトと、該昇降リフトの上方に支持され、最上段の加工材を吸着する吸着装置とを備えると共に、さらに、前記吸着装置の支持構造を、左右一方を前記昇降リフトの後方側に他方を前記昇降リフトの手前側に位置する様に斜めの配置で設置した左右の支柱と、該支柱によって支持された天井部とによって構成した。
(もっと読む)
ワーク供給装置およびその供給方法
【課題】ワーク供給装置およびその供給方法において、ワーク取り入れ装置からのワークの取り入れを間断なく行えるようにし生産性を低下させることがないようにする。
【解決手段】ワーク搬送回転体2を角度α毎に間欠的に回転させ、ワーク取り入れ孔3aないし他のワーク取り入れ孔にワーク4を取り入れる。ワーク取り出し装置6では、ワーク搬送回転体2を角度2α毎に間欠的に回転させることによりワーク4を取り出し、ワーク搬送回転体2にワーク4を一時的に貯留する。ワーク搬送回転体2を逆方向へ角度2α毎に間欠的に回転させることにより、貯留したワーク4をワーク取り出し装置によって取り出し、この間に、次のワークの取り入れ準備を行う。
(もっと読む)
ワーク反転装置
【課題】作業者やハンドリングロボットによらず自動的にワークを上下に反転することのできるワーク反転装置を提供する。
【解決手段】ワーク反転装置30は、圧入装置10の搬出経路途中に配置され、開口31aを回転中心からみて外側にした状態で回転可能なワークボックス31と、ワークボックス31の側面に設けられる第1及び第2のローラピン41、42と、開口31aが圧入装置10と反対側を向いているときに、昇降ユニット11の動きを第1のローラピン41に伝達して第1のローラピン41を押し下げ、ワークボックス31を回転させる押下げレバー33と、開口31aが圧入装置10の側を向いているときに、ワーク受けリフター13の動きを第2のローラピン42に伝達して第2のローラピン42を押し上げ、ワークボックス31を前記回転と逆方向に回転させるワーク受けリフター13と、を備える。
(もっと読む)
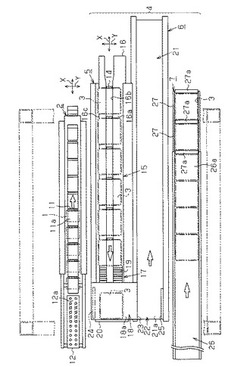
コンベアシステムのための持ち上げ装置、コンベアシステムおよび方法
コンベアシステムのための持ち上げ装置(1)は、ハウジング(2)と、持ち上げヘッド(14)と、を具備し、持ち上げヘッド(14)はパレットを保持するのに順応されている。持ち上げ装置(1)は、持ち上げヘッド(14)に取り付けられたリニアアクチュエータ(10)を具備し、リニアアクチュエータ(10)はパレット(5)を、コンベアトラックにおける下降位置である第1の位置から上昇位置である第2の位置まで持ち上げるために適応されており、第2の位置は前記第1の位置の略垂直上方である。本願はコンベアシステムおよび対象物の持ち上げ方法にも言及している。 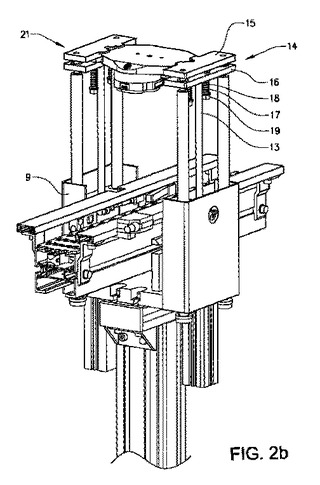 (もっと読む)
(もっと読む)
搬送システム
【課題】新たに専用の場所を設ける必要のない搬送システムを提供する。
【解決手段】搬送ライン10と、搬送ラインの上方に配置され搬送ラインに沿って搬送されるワーク20を保管する保管棚50と、搬送ラインの上方かつ保管棚の上流側または下流側に保管棚に隣接して配置され搬送ラインと保管棚との間でワークの受け渡しを行うワーク移載機構40とを備える搬送システム1であって、ワーク移載機構は、ワークの搬送方向に平行に延在して設けられるとともに、ワークの下面に当接してワークを持ち上げるアーム44、アームを昇降させる昇降手段45、アームと保管棚を搬送ラインの搬送方向に相対移動させる移動手段46とを備える。
(もっと読む)
プリフォーム検査装置
【課題】プリフォームを保持する保持ポケットを昇降させることにより、プリフォームを吸着する吸着ヘッドを昇降させる必要がないプリフォーム検査装置を提供する。
【解決手段】プリフォーム1の口部1aを吸着ヘッド25で真空吸着して、吸着ヘッド25を自転させながら公転させるメインロータ20を備え、メインロータ20は、プリフォーム1のつば1dを支持する支持部24aを有するとともに上下方向に移動可能な複数の保持ポケット24と、保持ポケット24と同心に上方に設けられプリフォーム1の口部1aに当接する吸着ヘッド25とを備え、保持ポケット24によりプリフォーム1のつば1dを支持してプリフォーム1を上昇させ、プリフォーム1の口部1aを吸着ヘッド25に当接させ、保持ポケット24によりプリフォーム1のつば1dを支持しながら吸着ヘッド25によりプリフォーム1を吸着するようにした。
(もっと読む)
供給部品の位置決め装置および位置決め方法
【課題】ハンガーで吊下げられたワークの抜き出し工程において自動取出しを可能とするに好適な供給部品の位置決め装置および位置決め方法を提供する。
【解決手段】フック22に係合孔W1を嵌合させて吊下げられたパネル状ワークWの左右の縁辺W2、W3に、上下一対のV字状ゲージ51A、52Aを左右方向外側から接近させて係合させることによりワーク面の傾斜およびワーク面に垂直な軸回りの回転を補正するワーク姿勢矯正手段としてのゲージ装置51、52と、前記ワーク姿勢矯正手段51、52の係合により姿勢が補正されたワークWを予め設定した量だけ上昇させて、ワークWの係合孔W1からフック22を離脱させる昇降手段としてのゲージ装置53と、を備える。
(もっと読む)
搬送装置
【課題】被搬送物の製造装置の稼動率低下を防止でき、かつ簡便な構造の搬送装置を提供することを目的とする。
【解決手段】複数の被搬送物3を取り出し位置まで順次に搬送するコンベア1と、コンベア1にて移動している複数の被搬送物3を各別にコンベア1から離して支持すると共に、支持した被搬送物3をコンベア1に戻す複数のリフター10と、コンベア1にて移動している被搬送物3を検出する複数のセンサ15とを備え、取り出し位置におけるリフター10aは、対応するセンサ15aが被搬送物3を検出した場合には被搬送物3を支持し、取り出し位置以外におけるリフター10b〜10fは、対応するセンサ15b〜15fが被搬送物3を検出しかつ搬送方向直前のリフター10が支持状態である場合には検出した被移送物3を支持する一方、搬送方向直前のリフター10が支持状態を解除した場合には被搬送物3をコンベア1に戻す。
(もっと読む)
1 - 20 / 38
[ Back to top ]