
Fターム[3F204FC03]の内容
クレーンの細部(制御、安全) (2,955) | 検出;表示;安全状態維持 (230) | 安全対策 (189) | 表示;警報 (49)
Fターム[3F204FC03]の下位に属するFターム
Fターム[3F204FC03]に分類される特許
1 - 20 / 29
ウインチ監視装置
【課題】オペレータの意図に反したロープの繰り出しの防止に資するウインチ監視装置を提供する。
【解決手段】ブレーキモードが中立フリーモードに設定されておらず、かつ、巻き上げ操作レバー13が操作されていない場合に、巻き取りドラム3が回転していることが検出されると、警報信号を出力するように構成した。この警報信号を利用してスピーカ31から音声にて巻き取りドラム3が回転している旨の報知を行うように構成することで、ブレーキ切換弁5のスプール位置の切り換え不良のような不具合が生じて巻き上げ操作レバー13を操作していないにもかかわらず荷の自重によって巻き取りドラム3が回転してしまう場合であっても、その旨を報知する警報を発することできる。
(もっと読む)
クレーンフックを利用したデータ収集システム及びデータ収集方法

【課題】揚重作業に基づく精度の高い検出データをリアルタイムで確認することができ、データ収集にかかる手間とコストを低減することができる。
【解決手段】資材2や作業者3の被検出体に取り付けられるとともに、資材2や作業者3のそれぞれを特定する識別情報が組み込まれた電子タグ4と、クレーンジブ12の先端12aに設けられ、電子タグ4の識別情報を無線で送受信可能とされる通信アンテナ5と、フックブロック11に設けられ、電子タグ4の識別情報を検出可能なタグリーダ6と、フックブロック11に設けられ、タグリーダ6で検出した識別情報を通信アンテナ5に向けて無線により送信する送信部7と、クレーン1の操作室13に設けられ、通信アンテナ5より送信された電子タグ4の識別情報を受信する受信部8と、受信部8で受信した検出データを蓄積するデータ格納部9とを備えたデータ収集システムを提供する。
(もっと読む)
クレーン軌道異常検出システム、クレーン軌道異常検出方法、及びコンピュータプログラム
【課題】 天井クレーンの軌道に異常があるかどうかを、可及的に少ない部品数で且つ簡単な処理で、自動的、定量的、且つ早期に検出する。
【解決手段】 天井クレーン100のサドル130a、130bに、天井クレーン100の走行方向(x軸)と、天井クレーン100のサドル130の横行方向(y軸)と、天井クレーン100の高さ方向(z軸)のそれぞれの加速度値を検出する3軸加速度センサ150a、150bを取り付ける。この3軸加速度センサ150a、150bから、天井クレーン100の走行方向及び高さ方向の加速度を取り込み、走行方向の加速度値を使って天井クレーン100の走行方向の現在位置を導出すると共に、高さ方向の加速度値を使って軌道210の異常の有無を検出する。そして、異常のあった場所をコンピュータ画面に表示したり、軌道210に異常があったことをブザーやランプで報知したりする。
(もっと読む)
クレーンのマスト倒壊防止装置
【課題】操作ミスに起因するマストの倒壊を防止し、安全性を確保し得るクレーンのマスト倒壊防止装置を提供する。
【解決手段】クレーンは、互いにガイラインを介して連結されたブーム及びマストと、起伏ロープの巻き取り又は繰り出しによりブーム及びマストを起伏回動させる起伏用ウインチと、マストを略水平な輸送姿勢から作業姿勢に押し上げるためのマストサポート装置と、自力組立・分解時にマストの角度制限を解除し、マストを作業姿勢から輸送姿勢に戻すための回動を可能にするためのマスト格納手段とを備える。マスト倒壊防止装置40は、マストサポート装置がマストを作業姿勢に押し上げたときの張出位置にあることを検出する検出手段42と、マスト格納手段の操作が行われたとき検出手段の信号からマストサポート装置が張出位置にあることを判断し、それを条件にマストの回動を許可する制御手段43とを備える。
(もっと読む)
クレーン
【課題】オペレータの操作ミスに起因するマストの曲げ変形などの発生を確実に防止し得るクレーンを提供する。
【解決手段】互いにガイラインを介して連結されたブーム及びマストと、フレーム上に起立した作業姿勢と後方に倒伏した収納姿勢とに変更可能に設けられたガントリと、起伏ロープの巻き取り又は繰り出しによりブーム及びマストを起伏回動させる起伏用ウインチと、マストをブーム代わりにして吊り作業を行う自力組立・分解時にマストの起伏角度が、ガントリの作業姿勢での頂部とマストの支点とマストの先端とが略一直線上に並ぶ所定角度になったときマストの巻上及び巻下を規制する制御手段53と、ガントリが作業姿勢にあることを検出する検出手段52とを備える。制御手段は、マストの巻上及び巻下を規制したとき、検出手段の信号に基づいてガントリが作業姿勢にあることを判断し、作業姿勢にあることを条件にマストの巻上を許可する。
(もっと読む)
画像生成システム
【課題】フックの周辺を鉛直斜め上方から見下ろしながらクレーンを操作する操作者に対して有益な画像情報を提示できる画像生成システムを提供すること。
【解決手段】画像生成システムは、天井クレーンに取り付けられて隣の天井クレーンを撮像するカメラであり、天井クレーンの走行方向に平行に延びる光軸を有するカメラと、その光軸に平行な方向に天井クレーンと共に移動するマークに含まれる対象点のその光軸に垂直な平面におけるその光軸までの固定距離と、天井クレーンから天井クレーンまでのクレーン間距離が所定値となるときにカメラが撮像する画像におけるその固定距離の画像上の大きさとに基づいて、カメラが撮像した画像上に複数のクレーン間距離を示す目盛りを描画する目盛り描画手段とを備える。
(もっと読む)
クレーンの異常検出装置
【課題】接続コネクタを用いたカウンタウェイト重量の検出手法を採用したクレーンにおいて、検出異常の有無を自動的にチエックし確認するのに有効な技術を提案する。
【解決手段】コネクタ接続状態検出手段1からの信号を受けて各分割ウェイト31〜33の合計重量を検出重量として取得する検出重量取得手段を備えたクレーンZにおいて、搭載されたカウンタウェイト30の重量が反映された物理量を取得し該物理量に基づいて上記カウンタウェイト30の重量を演算重量として取得する演算重量取得手段を備え、検出重量と演算重量を対比することで、コネクタ接続状態検出手段1の異常判定を行なうように構成しているので、コネクタ接続状態検出手段1の異常判定が自動的に行なわれ、クレーンの作業上の安全性が向上する。
(もっと読む)
リフト装置及びシステム
リフト・システム用リフト装置を開示する。本装置には、a)吊り上げ力を供給するためのモーター、b)積載装置をモーターに接続するべく、モーターに動作可能に接続された少なくとも一つのコネクタc)積載装置に関する負荷限界情報を受信する情報受信機、d)モーターおよび情報受信機に電気的に接続されたモーター・コントローラであって、情報受信機により受信された負荷限界情報に基づき、モーターの吊り上げ力を制限するモーター・コントローラ、が含まれる。 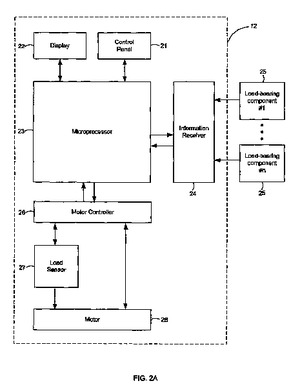 (もっと読む)
(もっと読む)
過巻警報装置機製造方法
【課題】過巻警報装置機を備え、連結システム構造の伝導駆動を決定とした一連維持を可能とし、作業を迅速に行うことから作業性・能率性・効率性・生産性の向上を提供する。
【解決手段】従来の林業・土木工事作業の事故・トラブルによる作動停止や危険極まりない作業条件を、過巻警装置機によって、安心・安全・事故防止・作業性・能率性・効率性・生産性の向上が得られる。
(もっと読む)
天井クレーンによる金型搬送システム
【課題】クレーンオペレータが直接目視することができない状況下にあっても、安全な天井クレーン作業を行うとともに、保全員の手持ち、運搬及び動作の無駄を無くして合理的な生産システムを構築するようにした天井クレーンによる金型搬送システムを提供すること。
【解決手段】プレス機11側の情報と天井クレーン側Cの情報とを地上側に配設した第1のデータ伝送装置1と天井クレーン側Cに配設した第1のデータ伝送装置1にて情報を相互に伝達するようにするとともに、天井クレーン側Cの第1のデータ伝送装置1と天井クレーン側Cに配設した検出手段にて天井クレーンの走行、横行及び巻上位置を検出して天井クレーンの位置情報を管理する制御装置をデータ電送装置で接続し、かつ第1のデータ伝送装置1間の情報と個別的にクレーンオペレータ側と天井クレーン側との情報を無線通信にて行うように構成する。
(もっと読む)
侵入制限エリアのあるクレーン運転方法
【課題】天井走行クレーン側で地上側の設備の運転状況を把握して地上側の設備との干渉を防止して天井走行クレーンによる吊り荷の運搬、地上側の設備へのロード、アンロードを安全に効率よく行うようにした侵入制限エリアのあるクレーン運転方法を提供すること。
【解決手段】天井走行クレーンK及び地上側の設備Mの双方に通信手段4、5を備えて双方向で通信可能とし、地上側の設備Mの運転状態と天井走行クレーンKの位置情報を双方で共有し、相互にインターロックをとって天井走行クレーンKの運転操作を行うように構成する。
(もっと読む)
方向表示装置、移動体操作システムおよび移動体の操作方法
【課題】安全性が向上された移動体の移動の操作に用いられる方向表示装置、移動体操作システムおよび移動体の操作方法を提供する。
【解決手段】移動体操作システム100は、移動体5,7aと、移動体5,7aの移動方向を操作指示するための指示手段を含む操作リモコン9と、操作手段9により、指示された移動体5,7aの移動方向を表示し、移動体5,7aの移動を操作する操作者および移動体の移動許容範囲にいる者が目視可能な場所に設けられた方向表示装置30とを含む。操作手段9は、移動体5,7aを移動させる前に操作者が移動体の移動方向を選択する選択手段11aと、移動体5,7aの移動を実行指示する実行指示手段11bとを含むことができる。
(もっと読む)
クレーンの安全確認装置
【課題】安全性と実用性に優れたクレーンの安全確認装置を提供する。
【解決手段】吊荷10の下方領域を含むクレーン周辺領域を上方から撮像するためのカメラ9a〜9eと、カメラ9a〜9eによって撮像されたクレーン周辺領域の画像を表示するために運転室に設けられたモニターと、カメラ9a〜9eによって撮像されたクレーン周辺領域の画像から作業者WのヘルメットHを認識する認識部を備える。認識部によって認識されたヘルメットHの画像を、モニターに表示されたクレーン周辺領域の画像に表示するように構成した。
(もっと読む)
作業用車両の排ガス浄化装置
【課題】 作業装置の作業者に対してDPF強制再生中の作業の安全を確保できる排ガス浄化装置を提供する。
【解決手段】 運転室41を備えた車両に搭載された内燃機関31と、前記車両に架装され前記内燃機関31で駆動される作業装置と、前記内燃機関31の排気ガス通路に備えられた連続再生型のDPF34と、前記DPF34に捕集されたPMを強制的に燃焼除去して前記DPF34を再生する強制再生手段と、前記強制再生手段を作動操作する前記運転室内に設けられた運転室内操作手段46または前記作業装置側に設けられた作業装置側操作手段51と、前記作業装置の作動を規制する作業装置作動規制手段と、を備え、前期運転室内操作手段46または前記作業装置側操作手段51により前記強制再生手段が作動操作されたときには、前記作業装置作動規制手段により前記作業装置の作動を規制する。
(もっと読む)
岸壁クレーン
【課題】コンテナクレーンのトラバーサの上にコンテナが載っているかどうかを表示することで、トロリーの運転者に安全かつ能率的な荷役操作を行なう装置を提供することを目的とする。
【解決手段】ブーム上に海側と陸側にトロリーとコンテナを載せて横搬送するトラバーサを設けた岸壁クレーンであって、トラバーサにコンテナの着床の有無を検出し、トロリーの運転室より確認できるように構成したコンテナの着床表示装置を設けた岸壁クレーン。
(もっと読む)
フローティングクレーンによる共吊り運転制御方法及び装置
【課題】フローティングクレーンに備えられているシーケンス制御装置を用いて簡略な装置構成によって共吊り制御を行えるようにする。
【解決手段】一方のフローティングクレーン1に備えられている一方のシーケンス制御装置Sと、他方のフローティングクレーン2に備えられている他方のシーケンス制御装置Sとを通信ケーブル16により接続して、一方のシーケンス制御装置Sを主PLC17とすると共に、他方のシーケンス制御装置Sを副PLC18とし、主PLC17に、重量構造物の巻上・巻下運転指令を発する運転操作ボード23と、夫々のフローティングクレーン1,2の運転状況を表示するディスプレイ13’と、演算装置24とを設け、主PLC17に設けた運転操作ボード23を一人の操作員がディスプレイ13’の表示を見ながら操作することで2隻のフローティングクレーン1,2による重量構造物の共吊りを可能にする。
(もっと読む)
ワイヤロープ寿命管理装置および方法
【目的】ショック荷重によってワイヤロープが受ける損傷を考慮して,ワイヤロープの寿命を算出する。
【構成】ワイヤロープがドラムから繰出され,かつ上記ドラムに巻戻されることによって,上記ワイヤロープおよび上記ワイヤロープが掛けられたシーブを介して荷物がつり上げられ,かつ降ろされる。シーブに設けられたロードセルから出力される荷物の荷重データに基づいて,上記荷物の実荷重および上記実荷重を所定量以上超えるショック荷重の有無が検知される(ステップ33)。ショック荷重の存在が検知された場合に,ショック荷重の存在が検知されなかった場合の寿命減算値に1以上の値を持つ補正係数が乗算して得られた値が推定寿命から減算され(ステップ34),新たなワイヤロープの推定寿命(残り使用可能回数)が表示される(ステップ35)。
(もっと読む)
浚渫作業システム及び水底土砂の水平掘削方法
【課題】 既存の浚渫作業船に対しても簡単な構成で水平掘削を可能にする。
【解決手段】 グラブバケット装置Bの昇降をコントロール操作する操作手段C1と、操作員が視認可能なモニター装置Mと、モニター装置Mの作動を制御する制御装置Uと、グラブバケット装置Bの深度測定手段Dsとが浚渫作業船に設けられ、制御装置Uは、グラブバケット装置Bの閉じ動作開始からの経過時間を横軸とし且つ深度を縦軸とした操作指示面m0と、操作指示面m0上でグラブバケット装置Bの閉じ速度と浚渫時の設定深度Loとバケット先端の円弧状移動軌跡rとに基づき設定されるグラブバケット装置Bの制御目標深度に対応する第1の指標m1と、操作指示面m0上でグラブバケット装置Bの閉じ動作中の測定深度に対応していてグラブバケット装置Bの閉じ動作時にその経過時間に応じて操作指示面m0上を移動する可動点よりなる第2の指標m2とをモニター装置Mに表示させる。
(もっと読む)
荷重負荷機械
【課題】本発明は、機体バランスを高精度に算出して即応性の高い転倒回避を行うことができる荷重負荷機械を提供することにある。
【解決手段】本発明は、地面に接地する地面接地部2と、この地面接地部2に連結された荷重負荷部3とを備えた荷重負荷機械(1)において、前記地面接地部2と荷重負荷部3の連結部(4,8)に複数の力学量検知センサ(11A〜11D)を設けると共に、これら力学量検知センサからの検出信号に基づいて機体バランスを演算して転倒の危険性を判断する演算装置15と、この演算装置からの指令により転倒回避指令を出力する転倒回避指令出力手段16を設けたのである。
このように構成することで、各力学量検知センサからの検出信号を比較するだけで作業中の機体バランスをリアルタイムで得ることができ、また、その結果を転倒回避指令出力手段16で出力するので、オペレータは荷重負荷機械の転倒回避を即行うことができる。
(もっと読む)
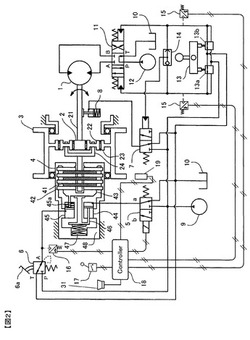
インバータ装置及び電動巻上機
【課題】電動巻上機の荷吊り状態でのインバータ完全停止を防ぎ応急的に動作させること容易にした回生回路故障保護方式を提供する。
【解決手段】交流を直流に変換する整流装置1と整流コンデンサ8、回生電力を熱エネルギーに変換する為の電力用半導体スイッチ2と回生抵抗器4、直流を交流に変換する周波数変換機9、回転する誘導電動機10に対し、電力用半導体スイッチ2を駆動する回生トリガ回路12とトリガ検出回路13と、電力用半導体スイッチ2の通電状態を検出する検出用抵抗器16と検出用フォトカプラ17、フォトカプラ17の出力信号を取込む電流検出回路14、トリガ検出回路13と電流検出回路14の2つの信号を取込む制御マイコン15、巻上機用インバータ装置の電源を通電・切断する電源開閉器11で構成され、電力半導体スイッチ2がショートモードで故障したときに電源開閉器11を開放する。
(もっと読む)
1 - 20 / 29
[ Back to top ]