
Fターム[4C601FF11]の内容
Fターム[4C601FF11]の下位に属するFターム
超音波衝撃波 (23)
温熱(ハイパーサーミア)、加熱 (78)
ホットナイフ (32)
エネルギー照射の照準を定めるもの (136)
治療部位の観察 (256)
Fターム[4C601FF11]に分類される特許
81 - 100 / 114
集束超音波を用いて発生した焦点の視覚化方法及び装置
本発明は、画像形成トランスデューサの超音波伝送をオフとする一方で治療用ビーム焦点を識別するために画像形成プローブにより全ての方向における受信を継続することにより、インタラクティブのリアルタイムの態様で治療用トランスデューサの焦点を監視することに関する。治療用の焦点合わせされたビームは、伝送するものとしてのみ作用し、焦点に散乱体がある場合には、焦点を識別するために強力な受信信号が発生されることになる。  (もっと読む)
(もっと読む)
分娩後出血のための処置
本発明は分娩後出血(PPH)を処置するために女性患者の子宮動脈からの血流を一時的に減しまたは閉止するための装置およびそのような装置を使用する手続を指向している。子宮動脈はクランプ器具により閉塞され、この器具は1対のピボット接続されたクランプ部材(11、12)を備え、各クランプ部材はハンドル(15、17)およびハンドル末端のクランプ要素(14、16)を備えている。これらのクランプ要素はハンドルの長手軸に対して好ましくは約1300および1600の間を含めて傾けられている。動脈探索センサーがクランプ要素の一つの少なくとも約1200および約1700の間の鈍い角度の末端に設けられている。好ましくは、動脈探索センサーはドップラー超音波血流センサーである。出産後、クランプ器具は女性患者の分娩後膣導管内に挿入され、その中でクランプ要素の一つが患者の子宮頸内に達し、かつ他のクランプ要素が子宮頸の外側上に達するまで進められる。患者の子宮頸の外側上のクランプ要素は患者の膣円蓋に対して押圧されかつクランプ器具は閉ざされてクランプ器具により掴まれている組織内に配置されている子宮動脈が閉塞される。クランプ器具は閉塞状態にロックされかつ患者の子宮が出血の停止が確認されるまでの、一般的には約5分ないし約7時間、閉塞状態に保持される。  (もっと読む)
(もっと読む)
動脈閉塞にバイパス形成するためのおよび/またはその他の経血管的手法を実施するための方法および装置

【課題】体内での外科的切開を伴わずに外科的又は介入的手法の実施を可能にするために、腫瘍、器官、組織等にアクセスするための新規の方法および装置を提供すること。
【解決手段】本方法は一般に、血管から血管性または非血管性標的位置への少なくとも1つの血管外経路の形成を含む。血管再生法の場合、血管外経路は血管性または非血管性標的位置でのアクセスまたは手法の実施のための導管として用いられる。さらに、本発明の血管外経路を形成するために、本発明のカテーテル用具100、103及びシステム138並びにこのような血管外経路を変形、保持および/または閉鎖するための装置が組み合わせて使用される。
(もっと読む)
ガイド要素上の胃腸用具
ガイド要素(16)、及び患者の結腸を介して前記ガイド要素(16)を引っ張るように構成された膨張可能機械装置(96)を含む胃腸装置(10)が提供される。胃腸用具(12)は貫通孔(14)を形成する形態であり、かつ前記ガイド要素(16)は前記貫通孔(14)を通過できる構成である。更に、他の実施形態が説明されている。  (もっと読む)
(もっと読む)
放射線治療時における標的臓器と線量分布の同時測定方法及びその測定装置

【課題】 本発明は、がんの放射線治療の精度向上のために、体内の臓器位置及び形状の情報と、陽子線による線量分布情報とを、リアルタイムに表示することが可能な放射線治療時における標的臓器と線量分布の同時測定方法及びその測定装置を提供することを目的とする。
【解決手段】 本発明は、超音波検出器により超音波の送受信を行う臓器情報検出手段と、前記超音波検出器の送信を停止し、放射線照射により発生した音響波を同超音波検出器で受信する線量分布情報検出手段と、前記臓器情報検出手段及び線量分布情報検出手段で検出した情報をコンピュータに保存する記録手段と、記録した情報をコンピュータで編集し画像化する演算手段と、画像化した情報を画面に表示する可視化手段とからなることを特徴とする放射線治療時における標的臓器と線量分布の同時測定方法の構成とした。
(もっと読む)
治療システム
【課題】 正確な治療を行うことを目的とした治療システムを提供する。
【解決手段】 治療システム1は、画像診断装置2と超音波診断装置3と超音波治療装置4とを備えて構成されている。超音波治療装置4での被検者に対する治療位置は、第一の治療計画部位に基づいて決定した第二の治療計画部位の情報を取り込んで治療位置を確定するようになっている。第一の治療計画部位は、画像診断装置2で撮像されたマルチスライス画像のボリュームデータから断層像データを抽出してなるリファレンス画像に基づいて指定した部位であり、第二の治療計画部位は、超音波診断装置3の超音波探触子14により獲得した超音波画像に基づいて指定した部位であるものとする。
(もっと読む)
第1座標系に関係する医療情報をMPSシステムを使用する第2座標系において位置合わせする方法及びシステム
第1画像を第2画像に位置合わせするシステムであって、該システムは、患者の身体の第1位置及び方向を検出する第1医療位置決めシステム(226)と、前記身体の第2位置及び方向を検出する第2医療位置決めシステム(236)と、第2イメージャ及び第2医療位置決めシステムに結合される位置合わせモジュール(232)とを含み、前記第1医療位置決めシステムは第1イメージャ(224)に関係付けられると共に結合され、前記第1イメージャは前記身体の第1画像を取得し、前記第1イメージャは、前記第1画像を、前記第1画像を前記第1位置及び方向と関係付けることによって発生し、前記第2医療位置決めシステムは、前記第2イメージャ(234)に関係付けられると共に結合され、前記第2イメージャは、前記第2画像を取得し、前記第2画像を前記第2位置及び方向と関係付け、前記位置合わせモジュールは、前記第1位置及び方向及び前記第2位置及び方向にしたがって、前記第1画像を前記第2画像に位置合わせする。 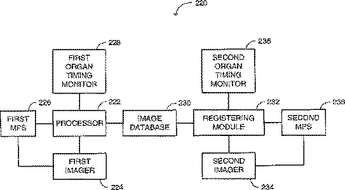 (もっと読む)
(もっと読む)
超音波により外部的に測定された体液の流れ挙動に関する情報を提示する方法及び装置
対象物内の流体の流れ挙動の証拠の超音波測定を提示するための流れ挙動モニタである。上記流れ挙動の証拠がドプラ信号パワースペクトル内の幾つかの周波数スライスに関して計算され、これら証拠は拍動性及び/又は血流並びに流れ挙動の他のパラメータを決定するために使用することができる。該計算された証拠の強い性質により、当該流れ挙動モニタは自動又は半自動体外式除細動器(AED)において患者を除細動すべきかを決定するための特別な用途を有する。  (もっと読む)
(もっと読む)
登録した画像を用いたカテーテル案内システム
体腔を撮像し、体腔内に治療エレメントを案内するシステムであって、撮像装置と体腔についての画像データを収集する画像プロセッサを有する撮像サブシステムを具える。マッピングサブシステムを具えていても良く、このサブシステムは、マッピング装置とマッププロセッサを有しており、体腔内のターゲット部位を同定して、この部位についての位置データを提供する。このシステムは又、治療装置上の位置エレメントに接続された位置プロセッサを具え、位置エレメントの位置を追跡する。治療エレメントの位置は、位置エレメントを参照して決定される。治療エレメントと治療送出ソースを有する治療サブシステムが設けられていても良い。登録サブシステムは、他のサブシステムからのデータを受信して登録し、このデータを表示する。  (もっと読む)
(もっと読む)
全体的または部分的関節形成において正確さ、速度及び単純さの増加を容易にする患者により選択可能な関節形成装置と手術ツール
軟骨置換システムと周囲軟骨との間の統合を容易にする。関節面修復材料を修復するための、および関節面を修復するための方法、構成、およびツールが開示される。関節面修復は、患者により注文可能であり、または、高度に選択可能であり、さらに、最適の噛み合わせおよび機能を提供するよう適合される。この外科的ツールは、全体的または部分的関節形成の速度、精度および簡単さを増すために、患者により注文可能または高度に選択可能となるよう設計されている。  (もっと読む)
(もっと読む)
超音波を使用して体液の流動性を測定および/又は検出する方法および装置
被検体の脈拍および/又は血流を検出および/又は側定する超音波方法および装置は、被検体の動脈の中の血液から後方散乱した超音波信号から、ドップラ信号スペクトルを計算する。流動性の徴候は、ドップラ信号スペクトル内の一部の周波数スライスに対して計算され、これらの徴候を使用して、拍動性および/又は血流、並びに流動性の他のパラメータ、を決定することができる。計算された徴候は概ね正しいので、超音波方法および装置は、患者を除細動すべきかどうかを決定するたえに、自動又は半自動の体外除細動器(AED)にで使用される。  (もっと読む)
(もっと読む)
血管へのカテーテルのナビゲーション支援装置及び方法
本発明は、血管2へのカテーテル1のナビゲーション支援に関する。まず、対象とする血管の部分のイメージ群のシーケンスは、血管内超音波(IVUS)プローブ3により取得され、当該血管のロードマップとして保存される。その血管内超音波(IVUS)プローブ3の現在位置で取得されるイメージ10は、当該ロードマップ上の最適位置に仕分けられる。プローブのモデル3’、及び、プローブに結合された器具(例えば、ステント11がある。)のモデル11’は、ディスプレイ6上で、当該ロードマップの対応する位置に表示される。  (もっと読む)
(もっと読む)
治療システム、超音波照射システム、治療システムにおけるデータ管理方法
【課題】 操作者のデータ管理作業を簡略化でき、人為的な記憶や記録に頼ることなく確実で間違いのないデータ管理を実行できる治療システム等の提供。
【解決手段】 所定の条件に従って、被検体の患部に対し、超音波エネルギーを供給することで、患部を治療するためのエネルギー供給系と、前記患部をモニタリングするための画像を撮影する撮影系と、を具備する。エネルギー供給系又は撮影系の所定の動作に応答して、又は所定のタイミングにおいて、イベント信号を発生させ、このイベント信号をトリガとしてモニタリング画像を保存し、且つ同じイベント信号をトリガとして患部の治療情報を保存する。管理サーバは、同一のイベント信号をトリガとして保存された治療情報及びモニタリング画像の保存場所を、互いに対応付けて管理するための管理情報を生成し記憶する。
(もっと読む)
超音波カテーテル・プローブ
【課題】
リンギングをはじめとする、トランスデューサ・アセンブリが送受信する信号中のノイズの発生原因を現レベルより低下させる超音波カテーテル・プローブを提供する。
【解決手段】
トランスデューサのバッキングとして機能し第2セクションと比べて大きな音響エネルギ吸収率を有する第1材料から成る第1セクションと、集積電子回路要素を支持するための第2材料から成る第2セクションとを有するマルチセクション形ボディを備える超音波カテーテル・プローブ。
(もっと読む)
血管の検出および閉塞のための方法および装置
本発明は動脈を閉塞することにより血流を減しまたは停止するための器具、システムおよび方法を提供する。本発明の特徴を具体化した非侵襲性血管閉塞器具は対向した組織接触面付きの1対の圧力適用部材、組織接触面間の距離を調整するように構成された支持シャフト、および少なくとも一つの圧力適用部材上に配置された血管位置決めのための少なくとも一つのセンサーを備えている。血管は血管近傍の組織を圧縮することにより動脈を間接的に圧縮して閉塞され得る。本発明の用途は、例えば、子宮の障害および子宮用動脈の閉塞により処置され得る状態の処置内に見出される。子宮用動脈は患者の膣のような体腔を介して接近され、かつ子宮用動脈の部分周りの膣壁部分の圧縮により閉塞され得る。 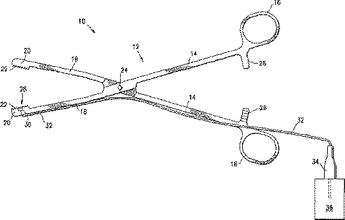 (もっと読む)
(もっと読む)
医療的侵襲処置計画、並びに侵襲型器具の位置決定及び進路誘導のための方法並びに装置
【課題】両室ペーシング療法等について、実際の処置前の侵襲的処置計画時に患者に即した適当な侵襲処置を識別すると共に侵襲型器具の位置を決定して進路を誘導することにより侵襲処置の実効性を高める。
【解決手段】心空間の画像データを取得し、該画像データから3Dモデルを作成するイメージング・システムと、三次元モデルを心空間の実時間画像と位置揃えして、三次元モデルを表示する侵襲型システムと、心空間内に配置され、侵襲型システムに表示されて(470、510)上述の位置揃えされた3Dモデルの上で実時間で進路誘導される侵襲型器具と、を有するシステム及びその方法が提供される。好ましくは、この方法及びシステムはまた、3Dモデルを記憶する記憶媒体を含んでおり、また侵襲型システムは、心空間の実時間画像と位置揃えするために記憶された三次元モデルを受け取る。
(もっと読む)
組織偏位又は分離のための装置、システム及び方法
組織偏位/分離装置が提供される。前記装置は、体の第一組織と第二組織との間で膨張可能な袋を含む。前記袋は、前記第二組織に適用される治療の影響から前記第一組織を保護するのに好適な様式で前記第二組織から前記第一組織を偏位又は分離することができるように選択された膨張された形状を有する。 (もっと読む)
ヒトもしくは動物の体内温度を、超音波逆算法を用いて測定する方法
ヒトもしくは動物の体内の局所温度を測定する方法が、提供される。本方法において、第1の超音波が、M型超音波のガイドの下に、測定領域に伝達され、これが温度Tを持つ。特定反射表面から反射された超音波が受信され、第1のパラメーターを得る。次いで、該測定領域の温度が、T+ΔTに修飾される。第2の超音波が、該測定領域に伝達される。特定反射表面により反射された第2の超音波から反射された超音波が受信され、第2のパラメーターを得る。第2のパラメーター測定値の、第1のパラメーター測定値に対する比が、得られる。もう一方で、第2のパラメーターの、第1のパラメーターに対する理論比も、理論計算を通じて、得られる。該理論比と測定比との間の差を含んでいるその目的関数が、最適化法により、最小化され得る。該測定領域局所温度上昇ΔTが、逆算法を用いて得られることになる。  (もっと読む)
(もっと読む)
高周波切除を行う間の3−D超音波ナビゲーション
【課題】
【解決手段】 医療デバイスの位置の追跡と身体内の組織の切除を同時に行うシステム。このシステムは、電源と、ナビゲーションデバイスと、制御回路とを具える。電源は、心臓組織などの組織を切除するのに好適な電流を発生する。ナビゲーションデバイスは、三次元基準座標システムを設定し、設定した座標システムに対するエネルギィ送出デバイスの位置を同定する。制御回路は、電源の始動と、設定した座標システム内の医療デバイスの位置を同定する超音波データの捕捉との間で切替又は交番を行う。
(もっと読む)
データセットの視覚化
リアルタイム3次元画像化において、視覚化の方法及び方向の選択が、介入が成功するには重要である。重要な問題は、ユーザ制御が適切ではない環境で、リアルタイムアプリケーションにおいて何を無視し、何を表示すべきかである。本発明は、注目対象に対する(ユーザによりもたらされる)介入を、ユーザによる対話的な入力を必要とすることなく視覚化することにより、この問題を解決する。有利には、本発明の例示的な実施形態によれば、視覚化処理のためのパラメタが、データ取得の間に自動的に選択され、そのことが、注目対象に対する、その構造体の実際の方向と相対的な位置との効率的なトラッキングを可能にすることができる。  (もっと読む)
(もっと読む)
81 - 100 / 114
[ Back to top ]