
Fターム[5B057AA07]の内容
Fターム[5B057AA07]の下位に属するFターム
Fターム[5B057AA07]に分類される特許
201 - 220 / 882
血管交差・分岐部位の抽出方法及び装置

【課題】本発明は、眼底画像からより高い確率で血管の交差・分岐部位を抽出する方法を提供することを目的とする。
【解決手段】抽出候補領域の外周部上に血管が3本以上走っていることと、外周部の複数の血管の座標平均が抽出候補領域の中央部に存在することを条件として眼底画像から血管の交差・分岐部位を抽出する。
(もっと読む)
顔画像合成方法及びシステム

【課題】学習データ集合に基づいて顔画像を合成する顔画像合成方法及びシステムを提供する。
【解決手段】学習データ集合は、複数の画像ブロック対に分割された画像対を含む。画像ブロック対は第一パターンの画像ブロックと第二パターンの画像ブロックとを一つずつ有する。前記の顔画像合成方法では、第一パターンのテスト用顔画像を受信し、受信した第一パターンのテスト用顔画像を複数の画像ブロックに分割し、複数の画像ブロックのそれぞれに対して、学習データ集合における第一パターンの画像ブロックからマッチングブロックを選択し、選択されたマッチングブロックに基づいて、学習データ集合における画像ブロック対から当該マッチングブロックに対応する第二パターンの画像ブロックを選定し、選定された第二パターンの画像ブロックを第二パターンの顔画像として合成する。
(もっと読む)
超音波診断装置
【課題】対象組織に関する運動のゆがみを低減した再構成処理を実現する。
【解決手段】ゆがみ評価部24は、再構成画像内で走査面の移動方向に沿って並ぶ複数の位置において、運動に伴う対象組織の形態の時間変化を計測する。さらに、ゆがみ評価部24は、複数の位置から得られる複数の時間変化を比較することにより、再構成画像のゆがみを評価する。ゆがみの評価は、再構成画像を形成する際のフレーム間隔を段階的に変更させて各段階ごとに行われる。そして、全てのフレーム間隔のうちでゆがみが最小であると判断された最適フレーム間隔で再構成処理が実行されて再構成画像が形成される。
(もっと読む)
超音波診断装置、及びプログラム
【課題】感度(輝度)と分解能(視認性)とを両立する映像を取得することができる超音波診断装置及びプログラムを提供すること。
【解決手段】被検体の所定部位を超音波により走査して断層画像データを取得する超音波診断装置10であって、走査の為の送信波として、分解能よりも感度を重視した画像を取得する為の第1の送信波と、感度よりも分解能を重視した画像を取得する為の第2の送信波と、を適宜切り替えて前記走査を行い、各々の送信波により取得した第1の画像及び第2の画像について所定の変換処理によって多重解像度解析を行い、これによって取得した各解像度の各係数毎に前記第1の画像と前記第2の画像との対応する各々の係数同士で所定のフィルタ演算を行い、このフィルタ演算結果について、前記多重解像度解析による変換処理の逆変換処理を行って、前記第1の画像と前記第2の画像との合成画像を生成する。
(もっと読む)
複数のビューに対する複数の断面映像を提供する超音波システムおよび方法
【課題】ボリュームデータにアクシャル、コロナルおよびセジタルビューに対して複数の断面を設定し、設定された複数の断面に対応する複数の断面映像を提供する。
【解決手段】脳を含む対象体に対する複数の超音波データを取得する超音波データ取得部と、前記複数の超音波データに基づいてボリュームデータを形成し、前記ボリュームデータに基準断面を設定し、前記基準断面から前記対象体の前記脳の脳鎌輪郭および大脳輪郭を検出してデータを取得し、前記ボリュームデータから前記対象体の前記脳の全体輪郭を検出してデータを取得し、前記脳鎌輪郭、前記大脳輪郭および前記脳の全体輪郭に対する前記データを用いて前記ボリュームデータを正規化し、前記基準断面を基準として前記正規化されたボリュームデータに対して複数の断面を設定し、前記正規化されたボリュームデータを用いて前記複数の断面に対応する複数の断面映像を形成するプロセッサとを備える。
(もっと読む)
眼底画像処理装置
【課題】 回転移動を含む眼底画像間の位置ずれをスムーズに検出する。
【解決手段】 第1の眼底画像から複数の小領域画像を切り出し各々第1の照合領域として取得する第1照合領域取得手段と、第1の眼底画像と同一部位の画像である第2の眼底画像に対して、画像処理により前記各第1の照合領域に対応する複数の小領域画像を切り出し、それぞれ第2の照合領域として取得する第2照合領域取得手段と、第1の眼底画像と第2の眼底画像の位置ずれ量を検出する位置ずれ検出手段であって、各第1の照合領域の重心位置と各第2の照合領域の重心位置との移動量を算出する重心移動量算出手段と、該重心移動量を所定の照合領域に適用した場合に残存する所定の照合領域でのずれ量から眼底画像上における所定の回転中心に対する回転移動量を算出する回転移動量算出手段と、を有する位置ずれ検出手段と、を備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】複数のフレーム画像に存在する特定の周波数のノイズ成分を効果的に除去する。
【解決手段】動画像を構成する各々のフレーム画像を、時間に沿って順次入力する画像入力部1と、画像入力部1からの動画像を複数の周波数帯域に分割する周波数分解部2と、分割した各動画像のなかで、特に時間に依存する分割した動画像の成分を消去または縮小する係数変更部3と、係数変更部3で消去または縮小した成分に基づいて、周波数分解部2とは逆の処理を行なうことで、周波数分解部2で分割した全ての動画像を再構成し、その再構成した動画像を時間毎に分割して、復元したフレーム画像を生成する画像再構成部4と、画像再構成部4で復元したフレーム画像を出力する画像出力部5と、を備えている。
(もっと読む)
医療用診断装置
【課題】位置決め用のレーザ照射の自動化による操作者のストレス低減(作業工数低減)
および患者眼部への誤照射阻止(レーザ障害防止)を目的とする。
【解決手段】顔(または頭部)認識を備えた画像処理機能と位置決め用レーザ照射機能を備えた医療用診断装置(X線装置、X線CT装置、MRI装置、超音波装置等)と患者を医療用診断装置内部に移動するためのベッドにおいて、医療用診断装置に接続されたカメラにて顔(または頭部)を認識してレーザ照射ラインが頭部領域内に入っているか否かを特定し、レーザ照射ラインを頭部領域通過時には位置決め用レーザを消灯する機能によって構成されている。
(もっと読む)
経時的な動的挙動に基づくパラメトリック画像
データ処理方法は、分析期間の臓器を表す一連インプット画像を提供するステップであって、個々のインプット画像は、分析期間内の対応する取得瞬間における臓器の対応する位置の呼掛信号に対する応答を、各々が示すインプット値のセットを含む、ステップと、選択された位置のセットの内の各々と時間に関する分析関数を関連付けるステップであって、分析関数は一連インプット画像内の選択された位置のインプット値の傾向をモデル化する、ステップと、分析関数に対して時間に関する参照関数を提供するステップと、個々の選択された位置の分析関数を、選択された位置の分析関数と参照関数との間の発散の極性の分析期間における傾向を表す極性傾向を判別する参照関数と比較するステップと、個々の選択された位置に対するパラメトリック値を含むパラメトリック画像を生成するステップであって、パラメトリック値は選択された位置の極性傾向を示す、ステップとを含む。 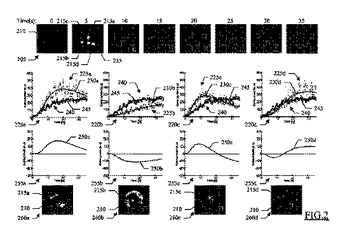 (もっと読む)
(もっと読む)
画像解析装置、その計測方法及びプログラム
【課題】
層の傾き及び湾曲度に基づいて層の厚みを計測する方向を決定し、その方向に沿って層厚を計測するようにした技術を提供する。
【解決手段】
断層画像内における各断層の層の厚みを計測する画像解析装置は、断層画像を入力し、当該入力した複数の前記断層画像から層の境界を抽出し、当該層の境界上に複数の基準点を設定する。そして、当該設定した基準点各々における層の厚みの計測方向を算出し、複数の基準点各々から当該計測方向に沿って層の厚みの計測を行なう。
(もっと読む)
ボリュームデータ間の対応付け方法
【課題】処理時間を短縮し、かつ精度よくボリュームデータ間の位置合わせを行う。
【解決手段】参照ボリュームデータ(D1)から探索ウィンドウ(3次元ブロック)を複数抽出する。抽出した複数の探索ウィンドウに設定される基準点に対応する入力ボリュームデータ(D2)の探索ウィンドウ内の対応点を、各探索ウィンドウより抽出したボクセルデータの相関(3次元POC)から探索する。探索した対応点と基準点との対応関係から参照ボリュームデータと入力ボリュームデータとの間の剛体変形パラメータ(回転ずれ、位置ずれを示すパラメータ)を推定し、入力ボリュームデータを剛体変形(回転ずれ、位置ずれを補正)する。剛体変形処理後の入力ボリュームデータと参照ボリュームデータについて、同様にして対応点を探索し、探索した対応点の情報を用いてFFD(Free-Form Deformation)により、入力ボリュームデータをさらに非剛体変形させる。参照ボリュームデータを剛体・非剛体変形させてもよい。
(もっと読む)
医療画像記録装置
【課題】短時間で、かつ、人為的な判断が介入することなく、手術時の動画から出血箇所や出血量等の必要な情報を得ることのできる医療画像記録装置を提供する。
【解決手段】本発明の医療画像記録装置は、手術中の術部の動画情報を取得する動画情報取得部11と、動画情報取得部11が取得した動画情報を画像処理することにより、画像中において出血領域50(動きのある領域)を検出し、この出血領域50(動きのある領域)の変化量に基づいて出血領域50(動きのある領域)の状態を判定する画像処理部とを有する。
(もっと読む)
血管セグメンテーションを行う超音波システムおよび方法
【課題】血管セグメンテーション(segmentation)を行う超音波システムおよび方法を提供する。
【解決手段】本発明における超音波システムは、血管を含む対象体に超音波信号を送信し、前記対象体から反射される超音波エコー信号を受信して前記対象体に対応する超音波データを取得する超音波データ取得部と、前記超音波データを用いてボリュームデータを形成するボリュームデータ形成部と、前記ボリュームデータを用いて3次元超音波映像を形成し、前記3次元超音波映像に複数のスライスを設定し、互いに隣接したスライス間で前記の血管の整列程度(degree of registration)に基づいて前記血管のセグメンテーション(segmentation)を行うプロセッサとを備える。
(もっと読む)
画像内の対象の検出方法
【課題】外観および形状を使用して対象の検出を行う。
【解決手段】画像のウインドウ内の分類器について特徴値が計算される。この特徴値が予め決定された閾値より上にあるか否かが決定され、特徴値が閾値より上にあるときに、画像のウインドウ内の後続の分類器について後続の特徴値が計算される。特徴値の値と後続の特徴とが組み合わされ、組み合わせた特徴値が現在の組み合わせのための組み合わせ閾値より上にあるか否かが決定され、組み合わせた特徴値が組み合わせ閾値より上にあるときには、さらに、後続の分類器がなくなるかあるいは組み合わせた特徴値が組み合わせ閾値より上でなくなるまで、後続分類器を含むように組み合わせた特徴値が計算され、最終的な組み合わせた特徴値を使用して、対象が検出されたか否かが決定される。
(もっと読む)
画像内の解剖学的構造の検出およびマッチング方法、画像内の解剖学的構造のマッチング方法、および、画像内の解剖学的構造の検出およびマッチングシステム
【課題】外観ならびに形状を使用して解剖学的構造のマッチングを行う。
【解決手段】候補解剖学的構造の画像が受取られ、その画像から特徴が抽出され、類似に成形された解剖学的構造に関連付けされた特徴が、候補解剖学的構造と比較され、トレーニングセットから少なくとも1つのもっとも近い近隣の形状を使用することによって候補解剖学的構造の形状が決定される。
(もっと読む)
眼底画像処理装置及びそれを用いた眼底画像処理システム並びに眼底画像処理プログラム
【課題】より精度よく眼底画像処理を行うことのできる眼底画像処理装置及びそれを用いた眼底画像処理システム並びに眼底画像処理プログラムを提供する。
【解決手段】眼底カメラと、眼底カメラに接続された眼底画像処理装置と、を有し、眼底画像処理装置は、眼底カメラが出力される眼底画像を処理前眼底画像として表示する処理前眼底画像表示部と、処理前眼底画像のうちの一部領域を抽出する抽出部と、抽出部によって抽出された一部領域に対し、一部領域の各軸に対するスペクトル解析を行ない解析データを作成する解析部と、解析データの比較基準となる基準データを記録してなるデータベース部と、解析データと基準データとの比較処理を行う比較処理部と、比較処理部の結果を表示する結果表示部と、を有する。
(もっと読む)
3D医用画像データの非線形投影
本発明は、ボリュームデータの投影像の表示を改善する。最小値投影法(MinIP)を使用し、液体で満たされた領域または低反射組織の他の領域を表示する。投影をボリューム内のパーシャルボリュームに限定することにより、特定の領域内の散乱強度の差を分離する。このようにして、弱く散乱する組織の高反射性を評価することができる。  (もっと読む)
(もっと読む)
医用画像処理装置および医用画像処理プログラム
【課題】脂質コアに代表される付着物質と血管内腔との近接度合いを求め、それにより不安定プラークの危険度を判断可能とする。
【解決手段】抽出部104は、血管を含む部位の画像データを基に血管の断面を求めてその断面から、血管の内腔の輪郭および血管内に付着する付着物質の輪郭を抽出する。膨張部105は、抽出された前記内腔の輪郭および付着物質の輪郭の一方または双方の、少なくとも一部分を所定量だけ膨張する。
重複領域演算部106は、血管のそれぞれの断面について、膨張部105によって膨張された内腔の輪郭および付着物質の輪郭が重なるときの重複領域の大きさを求める。
(もっと読む)
モジュール式イメージング・システムに使用するためのアプリケーション・サーバ
【課題】ネットワーク上でノードとして通信する自律的検出器及びイメージャ・サブシステムを管理するためのシステム及び方法を提供する。
【解決手段】一実施形態では、特定のイメージング・アプリケーションのためにイメージャ及び検出器の適切な組合せが使用されるように、自律的イメージャ及び検出器サブシステム(30、32)の使用を調整するアプリケーション・サーバ(62)が設けられる。別の実施形態では、検出器性能に関する因子を監視又は測定する1つ以上の自動ルーチンなどによって、検出器サブシステム(32)の性能を使用前に自動的に評価することができる。追加のシステム、方法及び装置も開示される。
(もっと読む)
内視鏡装置
【課題】観察対象物と内視鏡遠位端部との距離を相対的に表示することが可能な内視鏡装置を得る。
【解決手段】スコープコントローラ231は、観察画像を仮想的に複数のメッシュに区分する。そして、メッシュの中心点Oに向けてレーザ光照射部215にレーザ光を照射させる。レーザ光受光部216は中心点Oからの反射光を受光して、反射光の位相を検出する。スコープコントローラ231は、照射したレーザ光と反射光との位相差を用いて、メッシュの中心点Oから遠位端部211までの距離を算出する。システムコントローラ301が、受信した距離に応じて、等距離線を作成し、表示画像に合成する。そして、表示画像を表示部400に表示させる。遠位端部211から最も距離が近い部位を取り囲む等距離線は、最も濃い色で描かれ、遠位端部211から距離が離れるにつれて等距離線を表す色が薄くなる。
(もっと読む)
201 - 220 / 882
[ Back to top ]