
Fターム[5B057AA14]の内容
Fターム[5B057AA14]に分類される特許
141 - 160 / 222
地理空間モデルの地形データにおけるボイドの非線形な修復を提供する地理空間モデリングシステム及び関連する方法
地理空間モデリングシステム20は、地理空間モデルのデータベース21及びプロセッサ22を含む、プロセッサは、少なくとも1つのボイドの外から少なくとも1つのボイドに伝播する輪郭データに基づいて地理空間モデルの地形データ42aにおける少なくとも1つのボイド41aでデータを修復するため、地理空間モデルデータベース21と協働する。  (もっと読む)
(もっと読む)
道路データ生成方法、装置及びプログラム
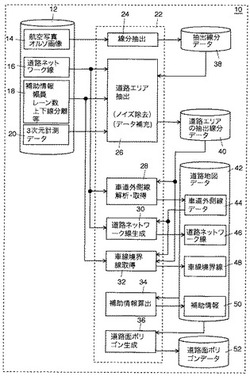
【課題】
画像データから道路データを生成する。
【解決手段】
線分抽出機能(24)が、オルソ画像データ(14)から線分を抽出する。道路エリア抽出機能(26)が、抽出された線分から道路エリアの線分を抽出する。車道外側線解析・取得機能(28)が、当該道路エリア抽出手段(26)で抽出された線分から当該道路の車道外側線を取得する。道路ネットワーク線生成機能(30)が、車道外側線から道路ネットワーク線を生成する。
(もっと読む)
地理画像処理装置、及びプログラム

【課題】人工衛星等から撮影したハイパースペクトル画像から、抽出対象の領域を抽出するのに適したバンドを自動的に選択することができる画像処理システムを提供する。
【解決手段】複数の波長帯域もつ地理画像を処理する地理画像処理装置であって、分類クラスごとに、複数の波長帯域に対応するスペクトルデータを格納する学習用データ格納手段と、分類クラスごとのスペクトルデータに基づいて、1つの処理対象の分類クラスについて他の分類クラスと比較して特徴ある波長帯域を選択するバンド選定処理手段と、バンド選定処理手段によって選択された処理対象の分類クラスの波長帯域の情報を、被覆分類処理をする際に使用する分類バンドデータとして格納する分類バンドデータ格納手段と、を備えることを特徴とする。
(もっと読む)
農地区画データ作成システム
【課題】高度上空から地表を撮影した観測画像に基き、ユーザの負担を軽減し、農地などの土地区画のデータを作成することができる画像処理システムを提供する。
【解決手段】衛星や航空機などの高度飛翔体から地表を撮影した観測画像から農地の候補となる区画を抽出する区画抽出手段と、農地候補区画の利用用途を分類する区画分類手段とを含むことを特徴とする。さらに、区画分類手段は、農地候補区画の各領域のノイズ量を計算するノイズ判定手段と、農地候補区画の各領域の植生指数を計算する植生判定手段と、農地候補区画の各領域の形状を計算する形状判定手段とを含むことを特徴とする。
(もっと読む)
パンクロマティック・マルチスペクトル画像対の空間的およびスペクトル較正
高解像度のパンクロマティック画像およびより低い解像度のマルチスペクトル画像を含む画像対から融合された画像を生成する方法およびシステム。本方法は、パンクロマティック画像型の第一の画像およびマルチスペクトル画像型の第二の画像を定義する画像データを得ること(204)を含む。第一の画像は第一の空間解像度および第一のスペクトル解像度をもつ。第二の画像は、第一の空間解像度よりも低い第二の空間解像度および第一のスペクトル解像度より高い第二のスペクトル解像度をもつ。本方法は、第一の画像を第二の空間解像度にダウンサンプリングするための点拡散関数および第二の画像を第一のスペクトル解像度にダウンサンプリングするための重みの集合を同時並行的に計算するステップ(212)をも含む。  (もっと読む)
(もっと読む)
位置合わせされたパンクロマティック画像に基づくマルチスペクトル画像の超解像のための構造化された平滑化
画像対から融合された画像を生成する方法およびシステム。本方法は、パンクロマティック画像型の第一の画像およびマルチスペクトル画像型の第二の画像を定義する画像データを得ること(204)によって始まる。第一の画像は第一の空間解像度および第一のスペクトル解像度をもつ。第二の画像は、第一の空間解像度よりも低い第二の空間解像度および第一のスペクトル解像度より高い第二のスペクトル解像度をもつ。第一の画像と第二の画像は融合されて(216)、第一の空間解像度および第二のスペクトル解像度をもつ融合された画像を初期化する。融合されたが像を形成するのを助けるためにぼかし機能が使用される(220)。  (もっと読む)
(もっと読む)
動体認識方法及び動体認識装置
【課題】 映像カメラを搭載した船体運動の影響を受けて、撮影した複数の隣接するフレームの映像の位置が一致しない揺動画像から、動く対象物をリアルタイムに自動抽出して認識する。
【解決手段】 所定の時間間隔で連続して撮影された連続画像を取り込むステップと、3枚の連続画像に遠景背景をモデルとしてテンプレートマッチング処理を行うステップと、テンプレートマッチング処理により得られたモデルの移動量や回転角度をフィードバックさせて3枚の連続画像の位置合わせを行うステップと、1枚目と2枚目、及び2枚目と3枚目の画像の組み合わせによりフレーム間差分処理を行い、得られた2つの差分画像の論理和を取り、動体を検出するステップと、検出された移動体に対してラベリング処理を行って、移動体個々を個別に認識するステップとからなる。
(もっと読む)
監視装置
【課題】 従来の監視装置では、異常発生直後に広域の網羅的情報収集することができないという課題があった。
【解決手段】 静止衛星に搭載され地球の画像を取得する撮像機、地球の全球内で上記撮像機の視野範囲を網羅的に走査可能な走査手段、撮像機で取得した地球の画像を格納するメモリ、取得した画像から同一地域を異なる時間に撮像したペア画像に対して対応する地点同士を位置合わせする画像マッチング処理手段、マッチング後の画像に関して同一地点同士の輝度データを差分処理する輝度データ差分処理手段、平時において発生する差分に対して有意な異常を判断する異常判別手段、異常の発生場所と輝度変化量の情報を通報する異常通報手段により構成する。
(もっと読む)
地表変化判別装置及び地表変化判別プログラム
【課題】該当地域の地表の変化を高速に精度良く解析する。
【解決手段】特異地表情報検出手段103は新規に得た該当地域の特異領域を算出し、特異地表情報検出手段203は事前に得た該当地域の特異領域を算出し、位置補正手段105は算出された新規に得た該当地域の特異領域及び事前に得た該当地域の特異領域に基づき新規に得た該当地域の地表情報と事前に得た該当地域の地表情報との位置合わせを行い、地表情報差分検出手段107は位置合わせが行われた新規に得た該当地域の地表情報と事前に得た該当地域の地表情報との差分を検出し、地表情報変化評価手段109は検出された差分について実際に発生した地表情報の変化であるか否かを評価する。
(もっと読む)
異なるソースの位置データをマッチングさせるためのコンピュータ装置及び方法
コンピュータ装置は、プロセッサ(11)とメモリ(12,13,14,15)とを有する。メモリ(12,13,14,15)は、コンピュータプログラムと、第1のソースに由来し、オブジェクト位置データを含む、オブジェクトのデータと、第2のソース(3(j))に由来し、オブジェクトに関連するレーザサンプルのサブセットを含み、それぞれのレーザサンプルについてのレーザサンプル位置データを含む、レーザサンプルとを格納する。プロセッサ(11)は、オブジェクト位置データと、レーザサンプルのサブセットのレーザサンプル位置データとを比較し、比較に基づいて、オブジェクト位置データを、レーザサンプルのサブセットのレーザサンプル位置データにマッチングさせ、第1のソースと第2のソースとの間で位置データの相対的位置誤差を修正する。オブジェクトは、建築物ファサードであってもよい。  (もっと読む)
(もっと読む)
画像補正装置、画像補正方法及びプログラム
【課題】精度良く、効率的に空中写真の幾何学的な歪みを補正する。
【解決手段】既存のオルソ化済衛星画像と標高データとを用いて、補正対象の空中画像の正射投影座標を計算し、計算した座標に合わせて空中画像を幾何補正(オルソ化)する第1の幾何補正を行う(S103)。そして、第1の幾何補正で補正された空中画像が、既存のオルソ化済衛星画像と一致するように、画像全域で対応点を取得して幾何補正する第2の幾何補正を行う(S104)。そして、既存のオルソ化済衛星画像と最も相関が合うように、第1および第2の幾何補正済の空中画像とをマージした画像を作成する(S105)。
(もっと読む)
画像マッチング装置、画像マッチングプログラム及び画像マッチング方法
【課題】デジタル画像のマッチングにおいて、入力された画像間の幾何学的歪みが大きい場合であっても高い精度のマッチングを行うことを目的とする。
【解決手段】ピラミッド構造化を用いたローカルエリアマッチングにおいて、各マッチングステップで前段階のマッチングステップでのマッチング結果に基づき、テンプレート画像の画像座標値をマッチング対象画像の画像座標値に近づくように任意変形(ラバーシーティング)する。そして、任意変形したテンプレート画像とマッチング対象画像とをマッチングする。
(もっと読む)
モザイク斜め画像、並びにモザイク斜め画像の作成及び使用方法
複数の原画像から斜めモザイク画像を形成する方法が開示される。はじめに、画像形成される所望の領域であって、斜めモザイク画像に収集される所望の領域が識別され(18)、次いで、バーチャルカメラ20のセンサの数学モデルが形成され(22)、バーチャルカメラは、画像形成される領域の高度よりも高い高度を有する。数学モデルは、所望の領域のセンサの斜めモザイクの画素マップを有する。斜めモザイクの画素マップに含まれるそれぞれの画素について表面の位置が決定され(24)、画像形成される領域の少なくとも1つのソースの斜め画像の画素は、斜めモザイクの画素マップに含まれるそれぞれの画素について投影し直され、所望の地理的な領域の斜めモザイク画像が形成される(26)。さらに、斜めモザイク画像における建物の傾きを保証する技術が開示される(28)。  (もっと読む)
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラムおよびプログラム記録媒体
【課題】飛行体に搭載したラインセンサで地表を連続的に撮影したラインセンサ画像に関し、3次元位置既知点に対応する画素の画像座標を高速に探索可能な画像処理方法を提供する。
【解決手段】ラインセンサ画像01の行26,27…ごとに、画像座標系uv 25から3次元基準座標系XYZ 22への変換情報となる座標変換情報を算出し、ラインセンサ画像の行ごとの飛行体3次元座標位置速度情報と前記座標変換情報とを用いて算出した行ごとのラインセンサ視野17と、3次元位置既知点P点 08との間の距離が最小となる行27を、3次元座標上でP点 08に対応する最適行として探索し、最適行として探索された行27上の各画素20について行ごとの飛行体3次元座標位置速度情報と前記座標変換情報とを用いて算出した直線29とP点 08との間の距離が最小となる画素をP点 08に対応するラインセンサ画像上の画素の画像座標とする。
(もっと読む)
所与の及び隣接する位置の点の差分和に基づいてフィルタリング動作を行う地上空間モデリングシステム及び関連する方法
地上空間モデリングシステム(20)は、地上空間モデルデータベース(21)と、地上空間モデルデータベースと協働して、夫々の位置の点に関連する高度を有するデータについて少なくとも1つのノイズフィルタリング動作を実行するプロセッサ(22)とを有することができる。その少なくとも1つのノイズフィルタリング動作は、各位置の点(45)について、所与の位置の点及び複数の隣接する位置の点の高度の間の差分の和に基づいて、夫々の中心点高度差を決定することを含みうる。  (もっと読む)
(もっと読む)
空中写真画像データセットとその作成方法および表示方法
【課題】 空中写真データセットは、専ら撮影中心を利用していたが、撮影画像内に納められた任意の対象物の画像を積極的に利用することが望まれている。
【解決手段】
空中撮影方向と、前記撮影方向に交差する方向(交差方向)で画面を重複させて撮影し、得られた複数の画像の中から、注視点を含んだ重複部分を含む特定枚数の撮影画像を前記撮影方向および/または前記交差方向から選択し、前記撮影画像のそれぞれの前記重複部分から、前記注視点を含む特定範囲の画像部分を選択して選択画像とし、前記撮影方向と前記交差方向をそれぞれのマトリックスの軸として、前記選択画像を並べて画像セットを作成する工程を含むことを特徴とする空中写真データセットの作成方法、得られた前記画像セットおよびその表示が前記課題解決に優れていることを見出した。
(もっと読む)
地図情報更新支援装置、地図情報更新支援方法及び地図情報更新支援プログラム
【課題】効率的な地図情報の更新作業を可能とする地図情報更新支援装置、地図情報更新支援方法及び地図情報更新支援プログラムを提供する。
【解決手段】通信インターフェース部10が、異なる時刻に取得された同一観測範囲の複数のレーダ画像データを取得し、位置合わせ処理部14が、上記複数のレーダ画像データを相互に位置合わせする。次に、特性値算出部18が位置合わせ後のレーダ画像データから観測範囲の地表面の状態を表す特性値を算出する。地物変化域抽出部19は、上記特性値に基づき、地物変化域を抽出する。次に道路変化候補域抽出部20は、前記地物変化域を観測範囲の地図情報に合成し、道路の変化箇所の候補である道路変化候補域を抽出する。出力部26は、道路変化候補域が合成された地図情報を出力する。
(もっと読む)
ノイズフィルタリング動作に基づいて建物データから群葉データを分離する地上空間モデリングシステム及び関連する方法
地上空間モデリングシステム(20)は、地上空間モデルデータベース(21)及びプロセッサ(22)を有する。プロセッサ(22)は、地上空間モデルデータベース(21)と協働して、群葉及び建物データから地面データ(51)を取り出し、少なくとも1つの差分和演算を有して群葉及び建物データに関する少なくとも1つのノイズフィルタリング動作を実行し、その少なくとも1つのノイズフィルタリング動作に基づいて建物データから群葉データを分離する。  (もっと読む)
(もっと読む)
画像判読支援動画生成方法、プログラム、及び画像判読支援動画生成装置
【課題】錯視を誘発することにより画像の判読を支援する。
【解決手段】判読対象画像に対して複数方向を光源とみなす複数のエンボス画像を生成し、複数のエンボス画像が連続的に切り替えて表示される動画を生成する。そして、エンボス画像の夫々に所定の背景画像を合成して複数のエンボス画像を生成し、合成された複数のエンボス画像が連続的に切り替えて表示される動画を生成することもできる。また、背景画像は、赤色画像、緑色画像、及び青色画像を含んで構成され、判読対象画像のエンボス画像の夫々に、赤色画像、緑色画像、及び青色画像を合成し、合成された複数のエンボス画像を生成することもできる。
(もっと読む)
地盤抽出方法、装置及びプログラム
【課題】
地上面を三次元計測した計測データから、簡易、迅速且つ高精度に、地盤面を抽出する。
【解決手段】
区画分割機能20が、対象地域を複数の区画に分割する。最小標高値探索機能22が、区画単位で最小標高点を探索し、暫定地盤抽出機能24が、最小標高点から比高差ΔHa範囲内の点データを計測データから抽出し、暫定地盤データ10bとする。フィルタ処理機能26が、暫定地盤データ10bから第2の比高差ΔHbを超える点を除外し、これにより簡易地盤データ10cを生成する。三角網生成機能38が、簡易地盤データ10cから三角網により基準面を生成する。比較機能32は、基準面より比高差ΔHcだけ高い仮想基準面と計測データ10aを比較し、仮想基準面より低い計測データを抽出し、最終地盤10dとする。
(もっと読む)
141 - 160 / 222
[ Back to top ]