
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
1,921 - 1,940 / 2,719
表示処理装置、表示処理方法、及びコンピュータプログラム
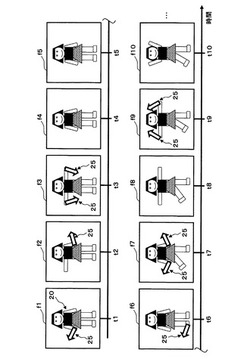
【課題】編集作業を行うことなく、自動で次の動作方向を示す矢印画像を映像中に表示する。
【解決手段】表示処理装置は、予めモーションキャプチャ技術により得られた動体の動きを表すモーションデータをフレームf1、f2・・・ごとに有する人体画像20の動画データを取得して記憶する。動画データの表示処理を行う際、時間的に前後するフレームf1、f2・・・に含まれるモーションデータの差分を算出し、算出した差分に基づいて人体画像20の動作方向を表す矢印画像25を生成する。生成した矢印画像25を、フレームf1、f2・・・に付加して、フレームf1、f2・・・の表示処理を行う。前後のフレームf1、f2・・・における人体画像20の動きが小さいとき、又は人体画像20が一時停止状態の場合は、矢印画像25を生成しない。
(もっと読む)
歩行者検出装置および歩行者検出方法

【課題】カメラで撮像した画像を画像処理して移動体を検出し、検出した移動体の移動速度の変化から歩行者に特有の変化を検出することで、歩行者を高い精度で検出することができる。
【解決手段】撮像部101で撮像した自車両前方の画像から特徴点を抽出する特徴点抽出部103と、特徴点を表す画素の画像上の移動速度を算出する移動情報算出部104と、画像を複数の短冊領域に分割し、各短冊領域内で速度が所定範囲内の画素を同一グループとするグループ化部105と、グループ内の特定の画素の座標を所定の範囲の俯瞰座標における座標に変換する座標変換部106と、変換後の画素の座標および移動情報に基づいて特徴点を平面物、立体物、移動体と判定する物体属性判定部107と、特徴点が移動体の場合は移動速度の変化に基づいて歩行者か否かを判定する歩行者判定部108とを備える制御部100を有する。
(もっと読む)
拡大観察装置および拡大観察方法
【課題】簡易な方式で画像比較を容易に実行可能な拡大画像装置および拡大観察方法を提供する。
【解決手段】第1の画像表示領域11に表示された指定点11Aと、第2の画像表示領域に表示された指定点12Aを一致させるとともに第1の画像表示領域11に表示された指定点11Bに対して第2の画像表示領域に表示された指定点12Bとを一致させるように第2の画像表示領域に表示された画像P2の位置および倍率を変更して、第1の画像表示領域に表示された画像P1と第2の画像表示領域に表示された画像P2の位置および倍率を変更した画像とを重ね合わせ処理して合成画像を重ね合わせ表示領域13に表示する。
(もっと読む)
残差補間を用いた超解像処理方法及び装置
【課題】画像列の解像度及び質を向上し、グリッドアーチファクトを低減した超解像処理の方法及び装置を提供する。
【解決手段】補間を行って最初の高解像度推定画像を生成し、位置合わせを行って位置合わせ画像を生成し、高解像度推定画像を不鮮明化し、不鮮明化画像と位置合わせ画像とを減算して残差画像を生成し、欠損していない周辺画素の残差値を用いて欠損残差を補間し、点拡がり逆関数を用いて残差画像から逆投影画像を生成し、平滑化画像と逆投影画像とを組み合わせて強調係数を生成し、強調係数を高解像度推定画像に更新して新たな高解像度推定画像を生成することにより、欠損画素の残差値を欠損していない周辺画素の残差値から補間する。
(もっと読む)
調査票管理システム
【課題】回収した調査票ごと(版ごと)の管理を容易にする。
【解決手段】調査票管理システム30は、データベース部46を備えている。データベース部46は、調査の結果が記入される調査票36の内容を調査票画像データとして記憶させた調査票記憶部54と、調査票36に記入された内容を加筆画像データとして記憶させた加筆記憶部56とが設けてある。調査票管理システム30は、調査結果が記入された調査票36を読み取り、画像データとして出力するスキャナ38を有する。スキャナ38の出力した画像データは、書込み部48によって調査票画像データとして調査票記憶部54に書き込まれる。また、スキャナ38の出力した画像データは、パターンマッチング部50において調査結果を記入される前の調査票画像データとパターンマッチングされる。加筆抽出部52は、パターンマッチング部50の出力に基づいて、調査票36に記入(加筆)された部分を抽出する。
(もっと読む)
超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム
【課題】例えば乳腺等の連続構造物と微小石灰化部分等の微小構造物とを正確に区別し、微小構造物を抽出することができる超音波診断装置等を提供すること。
【解決手段】例えば乳房、肝臓、膵臓等の診断において、不連続に存在する微小構造物を、当該画像と実質的に直交する方向(奥行き方向)関する情報をも用いて、微小構造物抽出処理を実行する。微小構造物抽出処理は、診断対象に関する画像群データに含まれる対象画像及び参照画像を用いた差分画像生成により実行される。このとき、対象画像上の対象画素(xi,yi)に対して、参上画像上に設定される参照領域Ri内に存在する画素の代表値(最大値)を決定し、これを対象画素(xi,yi)の値から差し引くものとする。
(もっと読む)
行列の待ち時間の計測システム
【課題】空港の保安検査場前等に形成された自然発生型又は誘導路型の行列が複数であっても各行列の総延長又は各行列を形成する人数を正確に測定できるようにすること。
【解決手段】監視カメラ2が撮影した監視エリアの撮影画像を、コンピュータの如き処理装置1で、速度場ラベルで表示した人物の画像データの生成(S1)、行列を形成しない人物の速度場ラベルの削除(S2)、背景差分ラベルで表示した人物等の画像データの生成(S3)、行列を形成しない人物と荷物等の背景差分ラベルの削除(S4)、速度場ラベルで表示した人物と背景差分ラベルで表示した人物を合成した画像データの生成(S5)、行列ラインの長さの計測(S6)、行列の推定移動速度の計測(S7)、及び行列の待ち時間算出(S8)の8つを順に行う処理し、監視エリアの行列の待ち時間を自動的に計測する。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】路面の影又は反射を除去して広い範囲を移動する移動体を従来よりも精度良く検出することができ、例えば、交差点全域において、直進する車両のみならず右折車、左折車などの車両、歩行者などを精度良く検出することができる移動体検出装置、該移動体検出装置を実現するためのコンピュータプログラム及び移動体検出方法を提供する。
【解決手段】CPU28は、ビデオカメラ1、1で撮像された第1の撮像画像における特徴点と、この特徴点に対して相関値が最大となる第2の撮像画像における相関点とを特定し、特定された特徴点及び相関点の座標に基づいて、車両の実空間上の点の三次元座標を算出する。CPU28は、算出した三次元座標の高さが所定の閾値以上である実空間上の点を抽出し、抽出した実空間上の点に対応する特徴点(又は相関点)で構成される領域を車両領域として検出する。
(もっと読む)
対象物検出装置、車両、対象物検出方法、並びに対象物検出用プログラム
【課題】車両の旋回時に画像上に生じる残像の影響を低減して、車両に搭載された撮像手段により得られた車両周辺の画像から歩行者等の対象物の種類を精度良く判定することができる対象物検出装置、車両、対象物検出方法、並びに対象物検出用プログラムを提供する。
【解決手段】撮像手段2R,2Lを介して取得した画像から車両10の周辺に存在する対象物を抽出する対象物抽出手段11と、抽出された対象物の種類を判定する対象物判定手段12とを備える。車両10のヨーレートを逐次検出するヨーレート検出手段3を備える。対象物判定手段12は、ヨーレート検出手段3により検出されたヨーレートの大きさに応じて、対象物の種類を判定するために実行する判定アルゴリズムを選択的に切り替える手段を備える。
(もっと読む)
読み取り装置
【課題】時間をずらすことなく、同時に異なる波長を有する複数の光源から出射された出射光が、観測対象物から反射または散乱することで得られる反射光または散乱光を、各々判別可能な光情報として受光できる読み取り装置を提供する。
【解決手段】読み取り装置が具える複数対の光源13において、同一の光源対に属する光源からの出射光は、同一波長を有するように配置する。そして、これらの出射光は、法線21を含む同一平面上に、この法線に対して対称的に出射される。また、異なる光源対に属する光源からの出射光は、互いに異なる波長を有しており、照射基準点19への、基準面17に対する入射角が互いに異なるように配置する。
(もっと読む)
画像処理装置、カメラ装置および画像処理方法
【課題】被写体に変化があるときには、その変化部分が拡大された映像とし、被写体の変化の有無と変化部分の内容を容易に確認できる画像処理装置および方法を提供すること。
【解決手段】連続して撮影が行われた撮影画像であって、撮影レンズ22により撮像手段221に結像した被写体の撮影画像について画像処理を行う画像処理装置100において、被写体の変化による撮影画像の移動部分を検出する移動部分検出手段110bと、移動部分検出手段110bにより移動が検出された移動部分の撮影画像を含む領域を移動領域画像として切り出す移動領域画像切出手段110dと、移動領域画像について、撮影レンズによる歪の補正処理を行うとともに拡大処理を行い、補正拡大画像を生成する補正拡大画像生成手段110eとを備える。
(もっと読む)
プランクトン観察装置及びプランクトン観察方法、並びにプランクトン計測装置、プランクトン計測方法及びプランクトン計測プログラム
【課題】プランクトンの計測を簡便且つ高精度に行う。
【解決手段】検水が滞留する滞留領域を有するプランクトン観察用セル1に対し、走光性を有するプランクトンを流入させ、かつ発光手段10により光を照射することにより、当該プランクトンを光の入射方向へ向けて遊泳させ、一定時間セル1内の止まらせておき、この間のセルの様子を撮像手段11により撮影することにより、走光性を有するプランクトンの観察を行う。
(もっと読む)
画像補正装置、印刷装置、画像補正方法、及び、プログラム
【課題】動画ファイルから取得した複数のフレームについて画像補正の適正化を図る。
【解決手段】複合機1が有するコントローラ60は、対象フレーム決定部、判定フレーム決定部、種類判定部、補正内容決定部、及び、画像補正部として機能する。対象フレーム決定部は、動画ファイルを構成する複数のフレームから、印刷対象となる複数の対象フレームを決定する。判定フレーム決定部は、複数の対象フレームから第1判定フレームと第2判定フレームを決定する。種類判定部は、被写体に基づく種類を第1判定フレームと第2判定フレームのそれぞれについて判定する。補正内容決定部は、第1判定フレームの種類と第2判定フレームの種類の組み合わせに応じて、複数の対象フレームに対する画像補正の仕方を決定する。画像補正部は、補正内容決定部で決定された画像補正の仕方に基づき、対象フレームの画像補正を行う。
(もっと読む)
立体物認識装置
【課題】周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度、走行環境等の不確定要因に対して、立体物の認識結果に基づく制御を適切なタイミングで実行可能とする。
【解決手段】ステレオカメラ2の撮像画像に基づく画像立体物の存在確率を画像立体物存在確率算出部11で算出し、ミリ波レーダ3の出力に基づくミリ波立体物の存在確率をミリ波立体物存在確率算出部12で算出し、レーザレーダ4の出力に基づくレーザ立体物の存在確率をレーザ立体物存在確率算出部13で算出する。そして、存在確率補正部14で、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率を、各認識センサの認識率に基づいて補正し、総合存在確率設定部15で、補正後の存在確率をフュージョンして総合存在確率を設定することで、障害物への接触回避や警報等の制御を確実且つ最適なタイミングで実行可能とする。
(もっと読む)
画像を作成しかつ改善するためのシステムおよび方法
画像を表示するための方法は、内視鏡の第1撮像素子からの画像の少なくとも1つの特性を内視鏡の第2撮像素子からの画像の少なくとも1つの対応する特性と一致させるように調整するステップを含む。少なくとも1つの特性は、色、コントラスト、および輝度の1つ以上とすることができる。内視鏡システムは、第1撮像素子および第2撮像素子を含む内視鏡と、内視鏡の第1撮像素子からの画像および内視鏡の第2撮像素子からの画像を表示するディスプレイ装置とを含み、画像は、被写体が撮像素子から等距離に配置されたときに画像内で略同一大きさに見えるように、サイジングが実行される。 (もっと読む)
認識装置および認識方法
【課題】静止物体との誤検出を一層防止しつつ対象物を認識することができる認識装置および認識方法を提供する。
【解決手段】撮像装置2による物体の撮像画像により対象物識別部6は物体が対象物か否かを識別し、静止物判定部7は物体が静止しているか否かを判定する。対象物位置検出装置3は物体の位置を測定し、地図データベース9は位置と静止物体の画像とを対応付けて記憶し、地図データ参照部8は物体の位置に対応する静止物体の画像を地図データベース9から抽出する。画像一致度比較部10は、物体の撮像画像と物体の位置に対応する静止物体の画像との一致度を比較し、対象物識別部3は一致度が閾値以上のときは、対象物と識別した物体を以後対象物と識別しない。これにより物体の撮像画像と地図データベースの静止物体の画像とを比較して一致度が高い物は対象物から除き、静止物体との誤検出を一層防止できる。
(もっと読む)
画像シフト検出方法および装置および画像入力装置
【課題】複眼像から単一の物体像を再構成する場合の各個眼像のずれや、デジタルカメラにおける手振れ補正のため、1度の露光期間内に読み出された複数の画像間のずれを、迅速かつ高精度に検出する。
【解決手段】同一物体に対する複数の略同一な画像間における微小なズレを検出する画像シフト検出方法であって、基準とする画像から高コントラスト領域8aを特定する第1の工程と、基準とする画像からのシフト量を検出すべき被シフト検出像から、第1の工程で高コントラスト領域として特定した領域と同じ領域を特定する第2の工程と、第1および第2の工程で特定した2つの領域を用いて画像シフトを検出する第3の工程とを有する。
(もっと読む)
部品実装方法、部品実装装置および部品実装システム
【課題】効率的に部品の実装処理を進めるとともに高い実装精度を確保する。
【解決手段】第1,第2のヘッドユニット5A,5Bにより部品を基板P上に実装する。ユニット5A,5Bに装備した第1,第2の基板カメラ23A,23Bにより基板P上の共通のマークを撮像して両ユニット5A,5B間での座標変換データを求める工程と、基板Pのマークのうち少なくとも両ユニット5A,5Bによる部品実装に共通使用するマークを第1のカメラ23Aにより撮像、認識する工程と、基板Pの被実装部分のうち第1ユニット5Aが担当する部分の補正データをマーク実測位置データに基づき求めるとともに、第2ユニット5Bが担当する部分の補正データをマーク実測位置データおよび座標変換データに基づき求める工程と、両ユニット5A,5Bの駆動により部品を実装する工程と、を有し、被実装基板毎にこれら各工程を経て部品を実装するようにした。
(もっと読む)
培養容器および自動培養装置
【課題】細胞の自動的に培養する。
【解決手段】培養容器10は、上面が開口した、細胞を培養する容器本体11と、容器本体11の上面を閉塞する蓋12とを備え、蓋12には、外部から所定の物質を注入または排出するための孔12a〜12cが開口されるとともに、この蓋12の表面には、画像処理により孔12a〜12cの位置を算出するための指標13が形成されている。この培養容器10の上面を撮像装置50により撮像し、撮像された指標13の画像に基づき孔12a〜12cの位置を算出し、算出された孔12a〜12cの位置に基づき容器10内にノズル65〜67の先端を挿入する。
(もっと読む)
信号変換装置
【課題】映像装置における画像や音声などについてユーザの嗜好に合致した調整を行う。
【解決手段】評価履歴管理部220は、評価入力受付部210により受け付けられた今回の評価値および評価値保持部110に保持された前回の評価値に基づいて、連続性状態保持部120に保持される連続性状態および連続性指標保持部130に保持される連続性指標を更新する。調整量更新部240は、連続性状態および連続性指標に基づいて調整量保持部140に保持された調整量を更新する。提案パラメータ更新部250は、連続性状態、連続性指標および調整量に基づいて提案パラメータ保持部150に保持された提案パラメータを更新する。提案画質提示部260は、提案パラメータに基づいて信号線201による画像信号を変換して信号線209によって提案画質の画像を提示する。
(もっと読む)
1,921 - 1,940 / 2,719
[ Back to top ]