
Fターム[5B057DC36]の内容
Fターム[5B057DC36]に分類される特許
301 - 320 / 3,240
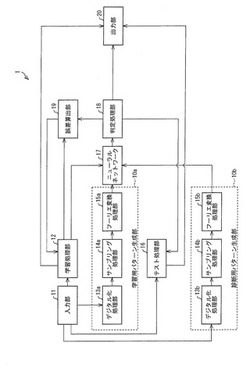
診断処理装置、診断処理システム、診断処理方法、診断処理プログラム及びコンピュータ読み取り可能な記録媒体、並びに、分類処理装置
【課題】簡素な構成で診断が実現可能な診断処理装置を提供する。
【解決手段】本発明の診断処理装置1は、診断対象の異常の内容的特徴を示す異常情報が予め明らかな学習用画像のデータをサンプリングし、学習用パターンを生成する学習用パターン生成部10aと、複数の学習用パターンを用いて、ニューラルネットワーク17に学習させる学習処理部12と、異常情報が不明な診断用画像のデータをサンプリングし、診断用パターンを生成する診断用パターン生成部10bと、診断用パターン生成部10bにより生成された診断用パターンを、学習処理部12による学習が行われた学習済みニューラルネットワーク17に入力して、その学習済みニューラルネットワークからの出力値に基づいて、異常情報が示す異常の内容的特徴を判定する判定処理部18と、を備える。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム

【課題】画像データのエッジに対して、高品位なエッジ補正処理を行う。
【解決手段】注目画素のデータの濃度を判定する濃度判定手段と、前記注目画素のデータに対して誤差拡散処理を行う誤差拡散処理手段と、前記注目画素のデータに対してディザ処理を行うディザ処理手段と、前記注目画素のデータと前記ディザ処理手段より生成されたデータとに基づきエッジ縁取り処理を行うエッジ縁取り処理手段と、前記注目画素が、前記濃度判定手段により閾値以上の高い値の濃度である高濃度と判定された場合は、前記注目画素に対する前記エッジ補正処理のデータとして、前記エッジ縁取り処理手段により生成されるデータを選択し、前記注目画素が、前記濃度判定手段により閾値よりも小さい値の濃度である低濃度と判定された場合は、前記注目画素に対する前記エッジ補正処理のデータとして、前記誤差拡散処理手段により生成されるデータを選択する。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の規則性に基づいて対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、対象部位の輝度から、対象部位に対応する特定物を仮決定し(S302)、水平距離の差分および高さの差分が第1所定範囲内にある、同一の特定物に対応すると仮決定された対象部位をグループ化して対象物とし(S304)、任意の対象物から、水平距離の差分、高さの差分、および、相対距離の差分が第2所定範囲内にある、同一の特定物に対応すると仮決定された対象物を順次検出し、対象物群を特定し(S306)、対象物群における対象物の数に応じて対象物群が特定物であるか否かを決定する(S308)。
(もっと読む)
カラー画像処理システム、カラー画像処理装置およびカラー画像処理プログラム
【課題】情報処理装置の出力画像を表示させる画像表示装置の表示特性に基づきその出力画像を色補正するカラー画像処理システム、カラー画像処理装置およびカラー画像処理プログラムを提供する。
【解決手段】情報処理装置と該情報処理装置の出力画像を表示する画像表示装置との間に接続されたカラー画像処理装置を備え、画像表示装置の表示特性を検証する検証画像を該情報処理装置の出力画像として該カラー画像処理装置で該画像表示装置に表示させ、該表示検証画像の検証結果に基づき該画像表示装置の表示特性を検証してその表示特性に応じた色補正を行う。
(もっと読む)
人体検出装置
【課題】人体やペットの移動方向を確実に得られることができるようにするとともに、移動領域の長手方向を確実に得られることができるようにすることを目的とする。
【解決手段】住宅内の床面を撮影するとともに、撮影方向が床面と垂直になる位置に撮影装置1を設置し、撮影装置1によって撮影された画像の変化領域を解析して移動物体の移動方向を取得するとともに、取得した移動方向と変化領域の長手方向とが一致しなかった場合に、人体判定装置2にて人体が動いたと判定するようにしている。これにより、人体を検出するために使用される撮影装置1によって住宅内の床面が真上から撮影されるので、人体やペットが移動する際に撮影装置1に近付いたり遠ざかったりすることがなくなり、人体やペットの移動方向を確実に得ることができるとともに、移動領域の長手方向を確実に得ることができる。従って、人体とペットとをより確実に区別することができる。
(もっと読む)
物体認識方法及び認識装置
【課題】魚眼画像に対し、射影変換や補正演算による画像の変換を行わず、魚眼画像の歪んだ画像をそのまま用いて物体の認識を行うことができるようにする。
【解決手段】物体の認識を行う対象魚眼画像110の歪みの方向にあわせて領域を分割し120、物体認識部130がそれぞれの領域毎に用意したデータベース140を用いて物体認識を行う。また、対象魚眼画像100に回転処理を施した複数の対象魚眼画像に対しても同様の処理を行い、検出座標変換部150が得られた物体位置を逆回転により元の位置に戻し、得られた結果を検出結果として出力する。これにより、物体認識の検出精度の向上、データベースのデータ量の削減が可能となる。また、魚眼画像に対する物体認識のためのデータベース作成には、データベース作成に必要となる物体画像を回転させたものを利用する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理対象の画像信号が示す画像をフローベクトルに基づく画像処理が行われたより画素数が多い画像に変換することが可能な、画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】画像信号が示す画像に対応するフローベクトルに基づいて、画像信号を処理する拡大前画像処理部と、フローベクトルに基づいて、拡大前画像処理部において処理された画像信号が示す画像を拡大する拡大処理部とを備える画像処理装置が提供される。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】画像のノイズを低減させるために、正確にノイズを計測することができるようにする。
【解決手段】第n−1番目のフレームの画像に対して時間加算ノイズ低減処理が施された画像をNR画面とし、NR画面に対する動き補償が行われ、入力された画像のデータにおいて第n番目のフレームの画像を入力画面とし、入力画面の画素値と動き補償されたNR画面の画素値から得られる所定の値を、時間加算ノイズ低減処理における巡回履歴に基づいて補正することで、入力画面のノイズが計測され、計測されたノイズに対応する加算比率が決定され、決定された加算比率に応じて定まる係数を乗じることにより、入力画面の画素値および動き補償されたNR画面において対応する画素値とを重み付け加算することで、入力画面に前記時間加算ノイズ低減処理が施される。
(もっと読む)
光輝性顔料の同定方法、同定システム、同定プログラム及びその記録媒体
【課題】光輝性顔料の画像特徴量と銘柄のデータベースとを照合して任意の光輝性顔料を同定する。
【解決手段】光輝性顔料を撮像して画像データを取得する第1工程と、取得した画像データに対して背景処理を行い、光輝性顔料の粒子1個を含むその近傍部分の画像データを処理対象画像データとして抽出する第2工程と、処理対象画像データから画像特徴量を抽出する第3工程と、複数種類の光輝性顔料のそれぞれについて第1〜第3工程の処理を行い、光輝性顔料に関する情報と、抽出した画像特徴量とを予め対応させて記憶したデータベースを作成する第4工程と、被同定対象の光輝性顔料について第1〜第3工程の処理を行い、被同定対象の光輝性顔料の画像特徴量を抽出する第5工程と、抽出した被同定対象の光輝性顔料の画像特徴量に基づいて、データベースから被同定対象の光輝性顔料を同定する第6工程とを含み、画像特徴量が、光輝性顔料の色を表す特徴量を含む。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の特定効率および特定精度を向上し、処理時間の短縮化を図る。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、対象部位の高さを取得し、データ保持部152に保持された、輝度の範囲と道路表面からの高さの範囲と特定物との対応付け(特定物テーブル)に基づいて、対象部位の輝度と高さとから、対象部位に対応する特定物を仮決定、または、グループ化された対象物に対応する特定物を決定する。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
走行支援装置及び走行支援方法
【課題】撮像手段の数を増加させる必要が無く、且つ、移動体の真後ろの二輪車について検出することが可能な走行支援装置及び走行支援方法を提供する。
【解決手段】視点変換部31は、カメラ10による撮像にて得られた画像を鳥瞰視される状態へ視点変換し、位置合わせ部32aは、視点変換された異なる時刻の、一方の隣接車線から区分線DLを跨いで自車両Vの直後方側まで設けられた第1の所定領域A1の画像と、他方の隣接車線から区分線DLを跨いで自車両Vの直後方側まで設けられた第2の所定領域A2の画像とについて、それぞれ個別に位置を合わせる。差分値検出部32bは、位置合わせされた異なる時刻の第1の所定領域A1及び第2の所定領域A2の画像データそれぞれの差分値を検出する。後続車両検出部33aは、検出された第1の所定領域A1の差分値と第2の所定領域A2の差分値との隔たりから後続の二輪車を検出する。
(もっと読む)
環境制御システムおよび環境制御プログラム
【課題】 人の眼の順応を考慮して、最適な環境制御を行うこと。
【解決手段】 所定の環境における光環境に影響を与える装置と、装置を制御する制御装置とからなる環境制御システムであって、制御装置は、所定の環境における輝度情報に基づいて、輝度画像を取得する取得手段と、輝度画像に基づいて、環境における人の知覚の程度を表す見え方画像を生成する生成手段と、見え方画像に基づいて、環境における見え方の適切さを示す指標を算出する算出手段と、指標の値と予め定められた目標値とを比較することにより見え方の適切さ評価を行い、評価結果に基づいて装置を制御することにより、光環境を制御する制御手段とを備える。
(もっと読む)
情報処理装置、その処理方法、プログラム及び撮像装置
【課題】
個人差の影響を受けずに、視線の向き(θ1、θ2)を高精度に検出できるようにした技術を提供する。
【解決手段】
情報処理装置は、画像から人物の顔を検出する顔検出手段と、各人物に対応して顔に関する情報と視線補正データとを保持する辞書データを予め記憶する記憶手段と、前記辞書データ内の前記顔に関する情報を用いて、前記顔検出手段により検出された顔を認証する顔認証手段と、前記顔検出手段により検出された顔から視線に関する情報を検出する視線検出手段と、前記顔認証手段により認証された顔に対応した前記辞書データ内の視線補正データを用いて、前記視線検出手段により検出された前記視線に関する情報を補正する視線補正手段とを具備する。
(もっと読む)
塗膜劣化予測方法、塗膜劣化予測装置及びコンピュータプログラム
【課題】塗膜の将来の劣化状態を予測できる塗膜劣化予測方法、塗膜劣化予測装置及びコンピュータプログラムを提供すること。
【解決手段】塗膜劣化予測装置1の仮想劣化画像作成手段11は、所定のパラメータ及び時間変数に対応する複数の仮想劣化画像を作成する。対象画像作成手段12は、塗装面の撮影画像から対象画像を作成する。仮想プロファイル作成手段13は、仮想劣化画像の統計量として劣化部の個数f、面積率a、標準偏差sを算出し、f−a−s空間座標上に仮想プロファイルを示す。統計量算出手段14は、対象画像から統計量を算出し、対象値特定手段15は、対象画像に近い仮想プロファイルの統計量を特定し、特定した特定量に対応するパラメータ及び時間変数を特定する。劣化予測画像作成手段16は、特定されたパラメータを劣化進行モデルに入力し、時間変数に特定された値よりも大きい値を入力して、劣化予測画像を作成する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】対象画像から高い精度でゴミ影部を検出することのできる画像処理装置を提供する。
【解決手段】撮像素子に撮像された処理対象画像に移り込む影部の輝度情報を用いて、光学部材に付着したゴミによるゴミ影部かを判定する輝度判定部63と、影部の色相情報を用いて、ゴミ影部かを判定する色相判定部64と、影部の彩度情報を用いて、ゴミ影部かを判定する第1彩度判定部65と、第2彩度判定部66と、を有し、影部が、輝度判定部、色相判定部及び第1彩度判定部においてゴミ影部と判定された場合、ゴミ影部と判定し、影部が、輝度判定部及び色相判定部においてゴミ影部と判定され、第1彩度判定部においてゴミ影部と判定されなかった場合、第2彩度判定部における判定を行い、第2彩度判定部においてゴミ影部と選択された場合、ゴミ影部と判定するゴミ判定部を備える。
(もっと読む)
情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法
【課題】簡単な操作で種々の画像を表示することが可能な情報処理技術を提供する。
【解決手段】ゲーム装置は、実空間に配置されたマーカを撮像する。ゲーム装置は、撮像した画像に含まれるマーカに基づいて、ゲーム装置を基準としたマーカの位置および姿勢を算出するとともに、マーカ上にマーカ座標系を設定する。また、ゲーム装置は、ゲーム装置が備える加速度センサが検出した加速度に基づいて、重力方向を検出する。次に、ゲーム装置は、検出した重力方向に基づいて、マーカ座標系の重力方向を算出し、算出したマーカ座標系の重力方向に基づいて、仮想キャラクタの姿勢を決定する。そして、ゲーム装置は、当該仮想キャラクタを表示装置に表示する。
(もっと読む)
車両用画像処理装置
【課題】画像のダイナミックレンジが大きく、白線等の道路設置物や灯火を確実に検出可能な車両用画像処理装置を提供すること。
【解決手段】第1の撮像手段3と、第2の撮像手段5と、前記第1の撮像手段3及び前記第2の撮像手段5の露出制御を、道路設置物・灯火認識用露出制御と、立体物認識用露出制御との間で切り替える切り替え手段7と、前記第1の撮像手段3及び前記第2の撮像手段5により撮像された画像から前記道路設置物、灯火又は前記立体物を検出する検出手段7と、を備え、前記道路設置物・灯火認識用露出制御において、前記第1の撮像手段3の露出と、前記第2の撮像手段5の露出とが異なることを特徴とする車両用画像処理装置1。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
画像信号処理装置及び画像信号処理方法
【課題】
明暗差が大きくかつ動き成分がある入力画像を鮮明な出力画像に変え得る画像信号処理技術を提供する。
【解決手段】
画像信号処理装置を、複数フレームの入力画像信号から該複数フレーム間の画像の動き成分を算出するとともに、該複数フレームの入力画像信号に基づいて画像のエッジ成分を算出し、該算出した動き成分とエッジ成分とに応じて、現在入力中のフレームの入力画像信号を信号処理し、該フレームの出力画像信号による画像が、ノイズ除去されかつコントラスト補正されたものとなるようにした構成とする。
(もっと読む)
301 - 320 / 3,240
[ Back to top ]