
Fターム[5F031CA20]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理の対象物 (12,583) | その他の対象物 (127)
Fターム[5F031CA20]に分類される特許
61 - 80 / 127
金属堆積ユニットにおいて、特に、光電池セルのための1つ以上の電子回路板を位置決めする位置決め装置

動作ユニット(11)に対して電子回路板(12a)を位置決めする位置決め装置(10)が提供される。この装置(10)は、第1の動作位置と第2の動作位置との間で選択的に回転する回転部材(16)と、上記回転部材(16)に取り付けられる位置決め部材(17)とを備える。上記位置決め部材(17)は、上記回転部材(16)に取り外し可能に取り付けられるフレーム(24)と、各電子回路板(12a)が載せられるトランスピラン材料で形成されたストリップ(32)とを備え、上記ストリップ(32)は、上記フレーム(24)に枢着された1対の巻取り/巻戻しローラ(30、31)の間に巻き取られる。 (もっと読む)
テストハンドラーにおいて半導体装置を移送する方法及び装置

【課題】 半導体装置を収納するためのバッファトレイを用いて前記半導体装置をテストするために用いられるトレイの間で、前記半導体装置を移送する方法と装置が開示される。
【解決手段】 バッファトレイの行方向のXピッチは、第1及び第2駆動部によってテストトレイまたはカスタマトレイの行方向のXピッチと同一に調節される。前記半導体装置は、第1及び第2ピッカーシステムによって前記テストトレイ、バッファトレイ、及びカスタマトレイの間で移送される。したがって、前記半導体装置の移送に所要される時間を短縮することができる。
(もっと読む)
ホールドエレベータ装置
【課題】収納室に多数のワークを収納可能であって、収納室へ先に搬入されたワークから順に搬出する「先入先出」の機構の実現が可能であると共に、ワークが載置されるワークトレイの昇降をシリンダ機構により実現して、収納・搬送中のワークの汚損防止が可能なホールドエレベータ装置を提供する。
【解決手段】本発明に係るホールドエレベータ装置は、ワークを一定姿勢で載置するワークトレイと、ワークトレイを収納室内で周回移動させるトレイ周回手段と、先にワークが保持されたワークトレイを支持し、後からワークが保持されたワークトレイが積層される際に該支持を開放するトレイ支持手段を備え、収納室へ先に搬入されたワークからワークトレイに載置してトレイ支持手段により一時的な支持を行いつつ、トレイ周回手段によりワークトレイを周回移動させて、先に搬入されたワークから順次、収納室から搬出される。
(もっと読む)
磁気スピンドル軸受を伴うロボット駆動装置
フレームと、フレーム内に装着され、第1のモータ部および少なくとも1つの固定子軸受部を含む少なくとも1つの固定子と、少なくとも1つの固定子軸受部が実質的に非接触で磁力により支持する同軸スピンドルであって、その各駆動シャフトが回転子を含み、回転子は第2のモータ部および少なくとも1つの回転子軸受部を含み、少なくとも1つの回転子軸受部は少なくとも1つの固定子軸受部とインターフェース接続するように構成されている、同軸スピンドルと、を備える基板搬送アームのための駆動部。第1のモータ部は、所定の軸でスピンドルを回転させるように、第2のモータ部とインターフェース接続するように構成され、少なくとも1つの固定子軸受部は、少なくとも1つの回転子軸受部との相互作用を介して、同軸スピンドルに接続している基板搬送アームエンドエフェクタの少なくとも平準化を行うように構成されている。  (もっと読む)
(もっと読む)
異物・欠陥検査・観察システム
【課題】フットプリントの大幅な増大を抑え、エッジ部分を含む高速・高分解能で、検査条件の確認を簡便に行える異物・欠陥検査・観察システムを提供する。
【解決手段】荷電粒子光学系による観察機能と、荷電粒子光学系および試料周辺を真空にするための排気機能と、稼動範囲が小さいrθステージと、を設け、従来異物・欠陥検査装置に搭載されていた光学式の観察機能では判別できない観察対象物表面およびエッジ部の微細な異物・欠陥を、他の観察装置を介することなく、検出された欠陥の致命/非致命を判断するための高分解能観察機能を設けた。
(もっと読む)
チャンバ、特に真空チャンバ内でキャリアを移動させる為の装置
【課題】層状基板を搬送する為に搬送ローラを備えた真空コーティング設備において、少なくとも一方向で、チャンバ内部の対象物を自動的に移動させる装置を提供する。
【解決手段】キャリア11は、板状に形成され、駆動システムによりローラ12上の狭側下縁部で支持されている。間接駆動装置は電磁継手を利用するが、電磁継手は一部が真空チャンバ内、一部が真空チャンバ外に配置されている。垂直方向に作用する力を用いて、電磁継手の2つの構成部品は、互いにずらすことが可能である。さらに、キャリアを水平方向にずらすことも可能である。
(もっと読む)
プローブ位置決め装置
【課題】プローブの位置決めを、比較的広いレンジにおいて、精度良く行うことができる装置を提供する。
【解決手段】プローブ1及び2は、試料20の近傍に配置される。電子銃3は、試料20の近傍のX−Y平面において、電子ビームを走査させる。プローブ用吸収電流測定部4及び5は、電子ビームの走査に伴ってプローブ1及び2に生じる吸収電流を測定する。プローブにおける吸収電流を測定した時点での電子ビームの照射位置の情報を用いて、プローブの位置を特定することができる。電子ビームの走査によりSEM画像を取得していれば、SEM画像中におけるプローブを特定することも可能である。
(もっと読む)
ガイド部材の位置決め方法、及び基板の位置決め方法
【課題】製造誤差によりガイド部材の位置がずれても、ガイド部材を再度位置決めし、基板を基板テーブルの所定位置に位置決めすることができるガイド部材の位置決め方法、及び基板の位置決め方法を得る。
【解決手段】基板テーブル24の円孔46へ脚部54を嵌合させ、位置決め冶具50の基本形状部52を基板テーブル24に位置決めする。そして、レール部材34によって移動可能に保持された第1ガイド30を基本形状部52に当てて停止させ、第1ガイドピン30A部の位置決め位置として設定する。製造誤差により第1ガイドピン30A,及び第2ガイドピンの位置決め位置がずれていても、位置決め冶具50によって第1ガイドピン30A,及び第2ガイドピンの位置決め位置を正規の位置へ設定することができ、これにより、基板を基板テーブル24の所定位置に位置決めすることができる。
(もっと読む)
ロットサイズ減少のためのバッファ付きローダ
ロードポート及び移送モジュールを有するシステム。一実施形態では、ロードポートは、第1の開口部及び第2の開口部を備えたプレートと、第1の加工物アクセスポートと、第2の加工物アクセスポートと、少なくとも1つの貯蔵場所とを有する。貯蔵場所は、第2の加工物アクセスポートの下か第1の加工物アクセスポートの上かのいずれかに配置されるのが良い。移送モジュールは、ロードポートに隣接して位置しており、かかる移送モジュールは、加工物容器を第1の加工物アクセスポートと第2の加工物アクセスポートと貯蔵棚又は貯蔵場所のうちのどれかと素材搬送システムとの間で移動させるロードアームを有する。 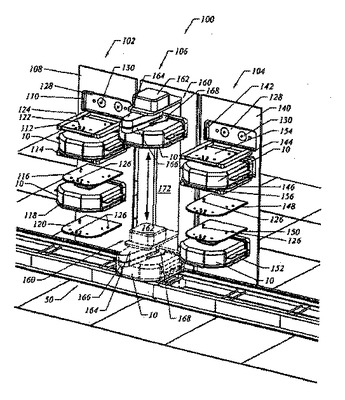 (もっと読む)
(もっと読む)
磁束センサおよび磁束センサを備えた平面ステージ
【課題】サーフェスモータステージ装置等を使った平面ステージにおいて、移動体の移動距離を測定するために、軽量安価でかつ構造が簡単な磁束センサを備えた平面ステージを提供すること。
【解決手段】磁性体からなる凸極が等間隔で形成されたプラテン8と、プラテン8上に浮上して移動する移動体2と、移動体2を制御する制御部9とを備えた平面ステージ1において、移動体2に、磁性体からなり、プラテン8の凸極のピッチの整数倍のピッチを有し、かつ前記凸極の幅と同じ幅を有する複数の凸部を有する櫛歯状部が形成された磁性体本体と、前記櫛歯状部に磁束を発生させる磁束発生手段と、前記櫛歯状部の磁束の変化を測定し、その結果を出力する磁束測定手段とを備え、前記櫛歯状部の凸部をプラテン8に対向するように配置した磁束センサ7を設け、制御部9は、前記磁束測定手段で測定された出力に基づいて、移動体2の移動距離を算出することを特徴とする平面ステージである。
(もっと読む)
真空吸着装置
【課題】鉄板やガラス、半導体素材用ウェハーなどのような平板状の物体、及び平滑な面を有する各種物品を真空吸着できる真空吸着システムを提供する。
【解決手段】空気を吸入して圧縮するための吸入圧縮手段と、空気の吸入により真空吸着される対象物の有無に応じて、該対象物に対する真空状態を調節するための真空調節部材を能動的に制御し、該対象物が存在する場合には真空吸着動作を行う一方、該対象物が存在しない場合には真空吸着動作を中断するように構成された吸着手段と、前記吸入圧縮手段及び吸着手段を連結する連結管と、前記連結管の管路上に設けられ、前記吸入圧縮手段による該連結管内の空気の流れを断続可能な開閉弁と、を備える。
(もっと読む)
基板載置装置及び方法
【課題】基板と基板載置手段との吸着が解除されて基板の位置がすれることを防止することを目的とする。
【解決手段】リフトピン81、82を、リフトピン81に設けられた吸盤83と基板12との吸着が維持されるような速度プロファイルで降下させる。その際、基板12とステージ14との間の圧力P、基板12の重量G、基板12と吸盤83との吸着力Sが、下記(1)式を満足するように、リフトピン81、82の降下速度Vを設定する。また、基板12とステージ14との間の圧力Pを、下記(2)式から演算する。
P<G+S…(1)
P=2∫0L/2Pn、(Pn=Pn−1+αμLV/h2)…(2)
但し、Lは基板12の長辺の長さ、αは比例定数、μは空気抵抗、hは基板12とステージ14との間隔である。
(もっと読む)
基板保持装置及び方法
【課題】基板に生じる熱歪みを抑制することを目的とする。
【解決手段】基板12をステージ14上に載置し、吸着装置84により基板12をステージ14に吸着させる。その際、基板12がステージ14に接触してから、基板の熱容量C、基板の温度上昇許容量ΔTp、基板と保持部材との間の熱抵抗R、基板と保持部材との温度差ΔTとに応じて決定した所定時間t以内に、基板12をステージ14に吸着させる。
(もっと読む)
アライメントマーク位置測定装置及び方法、及び描画装置
【課題】搬送されるステージ上に載置されたワークに設けられたアライメントマークの位置の測定誤差を抑制する。
【解決手段】CCDカメラ34A、34B、34Cによってワーク12に設けられたアライメントマーク18A、18B、18C、18D、18E、18Fを撮像する時点での、ステージ14の正規位置に対する位置の誤差を測定し、この測定結果に応じて、CCDカメラ34A、34B、34Cの撮影画像から算出される撮像時点でのアライメントマーク18A、18B、18C、18D、18E、18Fの位置の算出結果を補正する。
(もっと読む)
熱均一性が強化された加熱装置及びその製造方法
【課題】 本発明は、全体的に半導体処理チャンバ内の基板に比較的均一な温度分布をもたらし、或いはプレス形成ガラスレンズ用の金属金型又はセラミック成形型を加熱するための加熱装置に関する。
【解決手段】 基板の表面温度を調整/制御するための加熱装置が提供される。少なくとも1つの熱分解グラファイト(TPG)層は、ヒータ内に埋め込まれ、加熱装置内の種々の構成要素の温度差を拡散し、基板上の最高温度点と最低温度点との間の差が10℃よりも小さい、比較的均一な基板温度に対して基板の表面温度の時間的及び空間的制御を可能にする。
(もっと読む)
非接触搬送装置
【課題】超音波を動力として、搬送品を流体により浮上させながら搬送させる非接触搬送装置において、流体と搬送品と装置部分との摩擦により発生する摩擦電気なる静電気が多く発生していた。そのために、搬送品に流体と共に帯電した空気中の塵が付着すると言う問題が発生していた。また帯電のために、外乱を受けた際の音波放射波の低下や変動によって搬送品が振動体に接触する懸念があり、浮揚力の安定において信頼性に乏しいという問題があった。
【解決手段】静電気の防止のためセラミックと貯蔵室を具備したモジュールにより、流体の噴出圧力を一定にして静電気の発生を押さえ、搬送品の移動と共に、噴出、停止、流量を制御するため静電気の発生を最小限度に抑えることができる。また特にセラミックの多孔質板がポーラス型で且つアルミナ材質は静電気の発生を最小限に抑えられる。
(もっと読む)
被搬送物保管システム
【課題】搬送台車の停止位置補正教示工数を極限まで削減することができる被搬送物保管システムを提供する。
【解決手段】天井に敷設されたレール520a〜520fに沿ってOHT搬送台車300がFOUPを把持して走行する。レール520a〜520f下方に被搬送物保管棚200が設けられる。レール520a〜520fに複数のマスターバーコードが所定の間隔で貼着される。被搬送物保管棚200には、複数のキネマティックピンを有する位置決めプレートが複数枚配設され当該個々の位置決めプレートが所定の間隔で貼着された個々のマスターバーコードとの間で相対的に配置される。一の位置決めプレートの座標と、相対的に配置された一のマスターバーコードに基づいて停止したOHT搬送台車300のグリッパの座標との誤差量が補正装置に記録され、制御手段が他の被搬送物保管棚またはマスターバーコードに展開する。
(もっと読む)
露光位置マークの位置ずれ検出方法
【課題】露光位置マークにを的確に認識して、その測定結果に基づいて露光位置の位置ずれ量を正確かつ効率的に検出できるようにする。
【解決手段】露光位置マークを、内側の四角形パターン10aと外側の四角形パターン10bとからなる第1のパターンと、内周と外周が四角形パターン20a、20bに形成された矩形枠状の第2のパターンとによって構成し、第1と第2のパターンの重心位置を一致させ、第1のパターンの内側の四角形パターン10aと外側の四角形パターン10bとに挟まれた領域内に、前記第2のパターンを配置させるねらいで形成し、前記第1のパターンの内側の四角形パターン10aと前記第2のパターンの内周の四角形パターン20aとの重心位置のずれ量を検出した測定値と、前記第1のパターンの外側の四角形パターン10bと前記第2のパターンの外周の四角形パターン20bとから重心位置のずれ量を検出した測定値とを平均して露光位置の位置ずれ量を求める。
(もっと読む)
移動ユニット
【課題】 磁気浮上による非接触機構を採用し、装置を大型化及び高価格化することなく煩雑なメンテナンスが不要で、移動経路を自由に設定できる自在性がある移動ユニットを提供すること。
【解決手段】 超電導体からなる基板と、該基板上を非接触に移動する移動体とで構成される移動体ユニットであって、前記基板は、超電導状態を示すように冷却され、前記移動体は、複数のアクチュエータと、該アクチュエータの一端部を固定する固定部と、該アクチュエータの他端部に夫々接続された複数の錘とからなり、前記錘は、各々別個のアクチュエータによって前記固定部に接続され、該錘及び固定部の少なくともいずれか一方が磁石からなり、前記アクチュエータに対して選択的にエネルギーが供給されることを特徴とする移動ユニットとする。
(もっと読む)
基板位置検出装置、基板搬送装置、露光装置、基板位置検出方法及びマイクロデバイスの製造方法
【課題】 精度よく基板の位置を検出することができる基板位置検出装置を提供する。
【解決手段】縁部に識別形状を有する基板(W)のエッジ位置を、該基板を静止させた状態で検出して該基板の中心位置を求める第1検出装置(S1〜S5)と、前記第1検出装置とは別に設けられ前記基板の識別形状の回転位置を求めることにより所望の回転基準位置に対する前記基板の回転角度を求める第2検出装置(134)とを備える。
(もっと読む)
61 - 80 / 127
[ Back to top ]