
Fターム[5F031KA20]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 位置決め (4,282) | ウエハ、基板以外のものの位置決め (315)
Fターム[5F031KA20]に分類される特許
161 - 180 / 315
基板搬送ロボット

【課題】基板搬送ロボットのアーム部の基端側を同一点に取付けアーム類に負荷をかけずに基板ホルダーが取付けられるアーム部の先端側が直線運動するようにし、アーム部に装着されるベルト張力を一定にし基板ホルダーがアーム部先端側取付点を支点に回転するのを防止する。
【解決手段】駆動部に結合される二軸の同軸構造型シャフトの各軸にそれぞれ基端側が結合される左右一対の第一アーム及び第一アームと同一の長さで第一アームの先端側に関節部を介してそれぞれの基端側が結合される左右一対の第二アームからなるアーム部と、第二アーム先端側に取り付けられる基板ホルダーとを備え、第一、第二アームの回転運動により基板ホルダーが移動する基板搬送ロボット。基板ホルダーとアーム部との間に第二アーム先端部が取付けられている位置を中心とする回転を防止する回動防止手段を有する。
(もっと読む)
重ね合わせユニット及び貼り合わせ装置

【課題】ウエハとサポートプレートとを所定配置で重ね合わせる重ね合わせユニットを提供する。
【解決手段】ウエハ(W)又はサポートプレート(S)を支持する支持手段と、ウエハ又はサポートプレートを搬送する搬送手段と、を備えるウエハ(W)とサポートプレート(S)との重ね合わせユニット(1)であって、前記支持手段は、前記ウエハ(W)またはサポートプレート(S)の端部を支持する第1支持部と、ウエハ(W)又はサポートプレート(S)の端部を前記第1支持部に導く第1位置合わせ部と、を有する3本以上の柱状部材(10)を備える。
(もっと読む)
基板支持装置、表面電位測定装置、膜厚測定装置および基板検査装置
【課題】基板を平坦化しつつ支持する。
【解決手段】表面電位測定装置1の基板支持装置2では、第1流体噴出部21の円環状の第1多孔質部材211から、基板9の上面91上の対象領域911の周囲に向けて第1流体が噴出され、基板9を挟んで第1流体噴出部21と対向する第2流体噴出部22の円環状の第2多孔質部材221から基板9の下面92に向けて第2流体が噴出される。これにより、第1流体噴出部21と第2流体噴出部22との間において基板9を平坦化しつつ基板9を支持することができる。また、基板9と第1流体噴出部21の第1多孔質部材211との間の距離を、簡素な構造で一定に維持することができる。その結果、表面電位測定装置1において、平坦化された対象領域911上に所望の間隔をあけてプローブ31を位置させることができ、基板9上の対象領域911に対する表面電位の測定を高精度に行うことができる。
(もっと読む)
基板搬送装置及び縦型熱処理装置
【課題】基板の大口径化や超大口径化に伴う基板搬送時の基板中央部の自重による撓みを抑制ないし防止する。
【解決手段】大口径の基板wの上方又は下方に移動される支持部17と、該支持部17に設けられ基板wの周縁部を掴んで支持する掴み機構28とを有する基板搬送装置において、上記支持部17に、基板の上面中央部又は下面中央部を撓まないように空気層を介して非接触で吸引保持する非接触吸引保持部30を1つ又は複数設け、該非接触吸引保持部30は、上記基板の上面又は下面に向って突設された柱体又は錐体からなる負圧形成突部31と、該負圧形成突部31に対して側方から気体を噴出することにより負圧形成突部31の近傍に負圧を形成するための気体噴出ノズル32とを備えている。
(もっと読む)
天井走行搬送装置
【課題】気流の影響によらず、容易に搬送物を載置位置に載置する。
【解決手段】走行機構17がレール11に沿ってポート43上に移動する。昇降機構13が懸垂ベルト14を繰り出すことによって、FOUP21が降下する。距離センサ31が降下距離を測定し、FOUP21が位置決めピン23近傍まで降下したと判断した場合、風向風速センサ25が水平方向に関する風向及び流速を測定し、重量センサ30がFOUP21の重量を測定する。次に、ズレ量記憶部が参照されて位置ズレ量が推定され、この位置ズレ量に基づいて、水平移動機構12によって昇降機構13が水平方向に移動する。そして、再度昇降機構13が懸垂ベルト14を繰り出すことによって、FOUP21は降下して、FOUP21の位置決めピン23と位置決め穴とが重ね合う。
(もっと読む)
基板搬送装置及び縦型熱処理装置
【課題】基板の大口径化や超大口径化に伴う基板搬送時の基板中央部の自重による撓みを抑制ないし防止する。
【解決手段】大口径の基板wの上方又は下方に移動される支持部17と、該支持部17に設けられ基板wの周縁部を掴んで支持する掴み機構28とを有する基板搬送装置において、上記支持部17に、基板の上面中央部又は下面中央部を撓まないように空気層を介して非接触で吸引保持する非接触吸引保持部30を1つ又は複数設け、該非接触吸引保持部30は、上記基板の上面又は下面に対向する平面円形の本体31と、該本体に形成され中央に向って深くなるように傾斜した傾斜面32aを有する凹部32と、該凹部32の中央に設けられ上記傾斜面に沿って流れるように気体を放射状に噴出することにより負圧を発生させるための複数の気体噴出ノズル33と、上記凹部32の周縁部に適宜間隔で形成された気体逃げ溝34とを備えている。
(もっと読む)
搬送トレー及びこの搬送トレーを用いた真空処理装置
【課題】被処理基板をその全面に亘って精度良く略均一に温度制御できる搬送トレー及び真空処理装置を提供する。
【解決手段】搬送トレー1の基板載置面に、被処理基板Sの外形に対応した少なくとも1個の凹部11を形成し、この凹部の底面の外周に沿って環状のシール手段2と、凹部に落とし込むことで設置される被処理基板の外周面をシール手段に対して押圧する押圧手段3とを設ける。そして、この凹部に通じる少なくとも1本のガス通路12a、12bを開設し、このガス通路を介して、シール手段で支持されることで被処理基板の裏側に画成された空間に冷却ガスの供給する。
(もっと読む)
キネマティック保持装置、露光装置、及びデバイス製造方法
【課題】ステージとステージ支持盤との間に蓄えられた歪を開放し、より精密な位置決めが可能であるキネマティック保持装置を提供する。
【解決手段】
ステージ18と、ステージ18を支持するステージ支持盤19と、ステージ18の下面に設けられる突出部であるキネマボール2と、ステージ支持盤19の上面に前記突出部であるキネマボール2が挿入される凹部であるキネマV溝3とを有し、凹部であるキネマV溝3がキネマボール2に力を加え、ステージ18を昇降させる。キネマV溝3とキネマボール2間の摩擦力を減少させてキネマボール2の歪を除去し、キネマボール2を歪なく再現性よく保持できる。
(もっと読む)
基板処理装置および基板処理方法
【課題】基板の処理のタクトタイムが短い基板処理方法および基板処理装置を提供すること。
【解決手段】この基板処理装置は、第1吸着部4と、第2吸着部5とを備える。第1吸着部4による基板10の中央部の基板吸着板1への吸着が未完了で、かつ、第2吸着部5による基板10の周辺部の基板吸着板1への吸着が完了した時点で、基板10の位置決め動作を行う。
(もっと読む)
位置決めピンの固定方法及びピン固定台
【課題】搬送装置に搬送物を搬送させる前の準備作業である位置合わせを多大な時間をかけることなく簡易に行う。
【解決手段】フープを把持する把持機構にフープを介してマーカーを固定する(S1)。ここでマーカーは、先端のインク付着部が下方に位置し、フープの下面に形成された位置決め穴と水平方向に関して所定の位置関係を有するように固定される。次に、把持機構を下降させ、フープの載置台上にマーカーで位置合わせマークを形成する(S5)。そして、位置決め穴に対応する位置決めピンが固定されたテーブルを、位置決めピンが位置合わせマークに対して上記所定の位置関係を有するように、載置台上に固定する(S6)。
(もっと読む)
フラットパネルディスプレイのための環境隔絶システム
【解決手段】本発明は、概略的には、フラットパネルディスプレイ材料の格納及び搬送を行うシステムに関する。フラットパネルディスプレイシステムは、環境保護能力、材料のトラッキング機能、及び/又はワークステーション装填能力を有している。フラットパネルディスプレイシステムの構成要素の1つとして、搬送可能でシール可能な容器がある。フラットパネルディスプレイシステムの他の構成要素として、シール可能な装填ポートがある。装填ポートに容器がドッキングされ、基板が加工される。 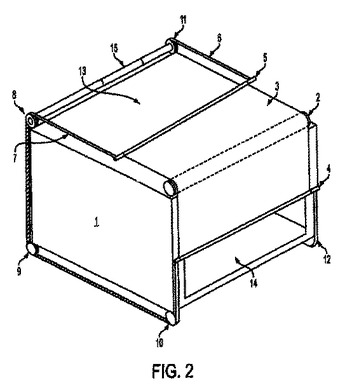 (もっと読む)
(もっと読む)
真空装置
【課題】真空状態の処理室にて試料を処理する真空装置において、試料の搬送時間の短縮とフットスペースの削減を図る。
【解決手段】真空装置1に、個別に真空引きすることが可能な上下に連なる上室10及び下室20を設け、さらにこれらの間を開閉するゲートバルブ40と、試料Sを載置する試料台31と、試料台31を昇降させて2つの室10、20の一方から他方へと試料Sを搬送する昇降機構32とを設ける。
(もっと読む)
ハンドラのティーチング方法及びハンドラ
【課題】吸着パッドが半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることができるハンドラのティーチング方法及びハンドラを提供する。
【解決手段】吸着パッドを検査用ソケットに配置されたICチップに向かって下動させるとき、吸着パッドからエアーを噴射させながら下動させる。そして、検査用ソケットにICチップの上面に接触するとき、吸着パッドから噴射しているエアーが、ICチップにて塞がれるようにした。従って、エアーの噴射が塞がれることにより、吸引管内のエアーの圧力の上昇を圧力検出センサが検出することによって、吸着パッドが検査用ソケット内のICチップに接触する高さを求めることができる。
(もっと読む)
半導体ウエハの保護テープ切断方法および保護テープ切断装置
【課題】半導体ウエハに貼り付ける保護テープのテープ切り口の仕上がりを周方向において均一かつ精度よくテープ切断処理を行う。
【解決手段】ウエハ径方向に移動可能に支持したカッタ刃12を半導体ウエハWの外周縁に押し付け付勢するとともに、カッタ刃12の旋回走行時に作用する遠心力の影響でカッタ刃12の押し付け付勢力が変化しないように、カッタ刃12の走行速度変動に対応させてカッタ刃12の押し付け付勢力が一定となるように自動調整制御し、半導体ウエハWの外周縁に対するカッタ刃12の接触圧力を安定維持させる。
(もっと読む)
ロボットの移動動作精度の確認方法及びロボットの移動システム
【課題】数ミリ以下の単位の位置精度を必要とする移動動作を行うロボットを運転する際、より安価かつ単純な方法で、ロボットの持つ位置情報の有効性を確認することにより事故を未然に防ぐ方法及び該方法を持つ移動システムを提供する。
【解決手段】予め移動システム1に設定された座標に数ミリ以下の単位の精度で移動動作をするロボット2が、該ロボット2のアーム21の先端に取り付けられている作業手段22により、所望の作業を行う際のロボットの移動動作精度の確認方法において、ロボット2の原点4とは異なる基準点5をロボット2の移動領域に設け、ロボット2が一作業を終了してから次の作業を開始する間の移動動作の際に、ロボット2を基準点5の座標に向かって移動させ、ロボット2が実際に移動した実位置と基準点5とを比較し、ロボットの移動動作精度の確認を行うことを特徴とするロボットの移動動作精度の確認方法及びロボットの移動システム1。
(もっと読む)
搬送システム
【課題】被搬送物を移載するための機構が設けられていない中継バッファを介して、その上面に被搬送物を載置して軌道上を走行する台車と、その下端において被搬送物を把持し、軌道に懸垂された状態で走行する台車との間で、被搬送物の受け渡しを行う
【解決手段】グリッパ47によりFOUP35を把持したOHT搬送台車16は、中継バッファ5に対向する位置において昇降ベルト46によりグリッパ47を降下させ、棚板21a、21bの上面に跨るようにFOUP35を載置する。OHS搬送台車8は、中継バッファ5に対向する位置において昇降テーブル64を上昇させて棚板21a、21bの間を通過させることによってその上面にFOUP35を載置し、その後、中継バッファ5に対向しない位置まで移動させてから昇降テーブル64を降下させることにより、FOUP35をFOUP載置台60に載置する。
(もっと読む)
摩擦駆動搬送装置
【課題】 搬送テーブルの真直性を確保し、ヨーの発生を防止する。
【解決手段】 ベース51上にテーブル移動方向に延びるスライドバー52を設ける。ベース51上に、スライドバー52を跨ぐよう配置した搬送テーブル53を、スライド自在に載置する。搬送テーブル53に、上記スライドバー52に接触させる駆動ローラ54と押付ローラ55a,55bを、ピエゾアクチュエータ57,58,59によりテーブル移動方向と直角の方向に変位可能に設ける。駆動ローラ54に駆動モータ60の出力軸をたわみ継手61を介して連結する。スライドバー52に撓み等が生じている場合には、駆動ローラ54と押付ローラ55a,55bの搬送テーブル53に対する相対位置を変位させることで、搬送テーブル53の位置と向きを、本来のテーブル進行方向位置及び向きに一致するよう補正させる。
(もっと読む)
板状体処理設備
【課題】ボックス体の移動、ボックス体に対する板状体の出し入れ処理を、構造簡単かつ安価にして行える板状体処理設備を提供する。
【解決手段】ボックス体11は、少なくとも一側壁を開放するとともに、内部に配設した支持部材15を介して、板状体1を上下複数段に収納自在に構成した。ボックス体に対して板状体の出し入れ処理を行う処理手段20を設け、処理手段の両側に振り分けて、ボックス体を支持自在な入れ側固定荷受台61と出し側固定荷受台71を設けた。処理手段は、一側壁の開放部11bを通して両固定荷受台の振り分け方向Aとは直交状の方向Bに板状体を搬送自在な搬送装置31と、搬送装置に干渉されることなくボックス体を昇降させる昇降装置41から構成した。昇降装置におけるボックス体を支持する昇降体55は、処理手段内と両固定荷受台とに亘って横移動自在に構成した。ボックス体を支持する昇降装置の昇降体により、ボックス体の昇降と横搬送とを兼用して行うことができる。
(もっと読む)
リソグラフィ装置およびデバイス製造方法
【課題】第一および第二可動オブジェクトを実質的に共通の動作区域内で位置決めする位置決めデバイスを提供する。
【解決手段】位置決めデバイスは、前記動作区域の隣に配置された第一コイルアセンブリと、前記動作区域の反対側に配置された第二コイルアセンブリと、第一可動オブジェクト上に配置され、第一コイルアセンブリと協働する1つまたは複数の第一磁石と、第二可動オブジェクト上に配置され、第二コイルアセンブリと協働する1つまたは複数の第二磁石とを含む。
(もっと読む)
クランプ機構
【課題】載置台の下方スペースを有効活用できるクランプ機構を提供する。
【解決手段】キャリアベース3は、FOUPオープナ本体部50bの上部に対して移動可能に設置され、クランプベース4は、キャリアベース3の上部に対して移動可能に設置されている。クランプレバー5aは、回転軸5cを介して、クランプベース4の上部において回動可能に支持されており、クランプレバー5bからは、クランプ用爪部5bがアンドック方向へ突出形成されている。クランプベース4は、キャリアベース3に対してアンドック方向へ付勢され、クランプレバー5aは、クランプ用爪部5bが下方向へ変位するように付勢されている。キャリアベース3とFOUP2とは一体となって移動する。クランプ用凹部2hに収容されたクランプ用爪部5bが、被クランプ部2cを上方から下方へ向けて押圧することにより、FOUP2が載置台51に固定される。
(もっと読む)
161 - 180 / 315
[ Back to top ]