
Fターム[5H115TR06]の内容
車両の電気的な推進・制動 (204,712) | 監視、診断、異常検出箇所 (5,279) | 検出部 (541)
Fターム[5H115TR06]の下位に属するFターム
速度、位置検出器 (111)
Fターム[5H115TR06]に分類される特許
41 - 60 / 430
走行制御支援方法及び走行制御支援装置
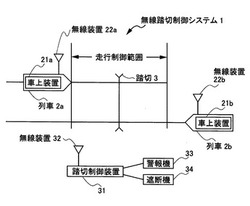
【課題】安全性を低下させることなく、コストをかけずに、警報時間の短縮効果が得られる走行制御を支援する。
【解決手段】列車2が踏切3に接近すると、車上装置21は、自らの列車2の位置・速度情報を所定の間隔で踏切制御装置31に送信する。踏切制御装置31は、車上装置21から受信する列車の位置及び速度に基づいて踏切到達予測時間及びブレーキパターン到達予測時間を算出する。また、踏切制御装置31は、予め記憶する設計警報時間と、算出される踏切到達予測時間を比較するとともに、予め記憶する踏切遮断完了時間と、算出される踏切遮断完了時間を比較し、所定の条件を満たす場合には警報を開始するように指示する。踏切制御装置31が、警報開始後に列車2を加速させる走行制御パターンを算出し、車上装置21に送信する。そして、車上装置21は、算出される走行制御パターンを乗務員に提示し、乗務員による走行制御を支援する。
(もっと読む)
車両および車両の制御方法

【課題】外部充電が可能な車両において、車両電源が投入されたまま放置された場合に、適切なタイミングで車両電源を自動的に遮断する。
【解決手段】外部充電が可能な車両100は、蓄電装置110からの電力を用いて車両100の駆動力を発生するためのPCU120と、蓄電装置110とPCU120との間の導通および非導通とを切換えるためのSMR115と、ECU300とを備える。ECU300は、ECU300が起動状態であるがPCU120が非駆動状態であるIG−ON状態の期間に、SMR115が非導通でかつ充電ケーブル400が非接続である状態の継続時間がしきい値を上回るか否かを判定する。そして、ECU300は、この継続時間がしきい値を上回る場合に、車両電源を自動的に遮断してIG−ON状態を終了させる。
(もっと読む)
走行パターン計画装置
【課題】エンジンの再始動時における消費エネルギーを低減し、確実に燃費向上を図ることができる走行パターン計画装置を提供する。
【解決手段】走行パターン計画装置は、自車両前方の道路線形情報を取得し、その道路線形情報に基づいて、コーナー出口またはその手前においてスタータによりエンジンを再始動するような基本速度パターンと、コーナー入口手前において押しがけによりエンジンを再始動するようなコーナー入口押しがけ速度パターンとを生成する。そして、走行パターン計画装置は、自車両前方の道路線形情報及び自車両の車速に基づいて、コーナー入口手前の押しがけ地点から加速地点までの走行時間(アイドル回転時間に相当)が所定時間以下であるかどうかを判断し、コーナー入口手前の押しがけ地点から加速地点までの走行時間が所定時間以下であるときは、コーナー入口押しがけ速度パターンを採用する。
(もっと読む)
電気自動車の制御装置
【課題】発電用のエンジンを搭載したレンジエクステンダ型の電気自動車において、排出ガス浄化率を確保しながら低コスト化の要求を満たすことができるようにする。
【解決手段】発電用のエンジン10は、要求発電量等に応じて運転モードを切り換えるとき以外は定常運転することができるため、過渡運転時の空燃比制御の応答性をあまり必要としない。この点に着目して、触媒38の下流側に排出ガスセンサ39(例えば酸素センサ)を設置し、この排出ガスセンサ39の出力に基づいて空燃比フィードバック制御を実行する。これにより、触媒の上流側に排出ガスセンサを設置する場合に比べて、排出ガスセンサ39の出力特性の変化(ばらつき)を小さくして、空燃比制御精度の低下を抑制することができ、触媒38の排出ガス浄化率を確保することができる。また、触媒の上流側と下流側の両方に排出ガスセンサを設置する場合に比べて、低コスト化できる。
(もっと読む)
車両の駆動力制御装置
【課題】 原動機と電動機とを駆動源として備える車両のHEV走行中において、プレシフトするときの所謂駆動力抜けを防止できる車両の駆動力制御装置を提供する。
【解決手段】 駆動力制御装置は、HEV走行中における奇数段から偶数段へのアップシフトのイナーシャ相t3〜t6中に、モータトルクTeを0にし、第1噛合機構SM1を、前段を確立させるギア列の駆動ギアと第1駆動軸との連結を断つニュートラル状態に切り替えた後、次段よりも変速比の小さい変速段を確立させるギア列の駆動ギアと第1駆動軸とを連結させる状態に切り替える。そして、第2クラッチトルクTc2をエンジンのイナーシャトルクが伝達されるようにTQ1からTQ4に上昇させ、0となったモータトルクTe分のトルクを補填する。
(もっと読む)
車両用駆動システム
【課題】スリップ発生時にてモータの制御性を適正に確保できる車両用駆動システムを提供すること。
【解決手段】この車両用駆動システム1は、エンジン2およびモータ6を動力源としたハイブリッド走行を実現できる。また、車両用駆動システム1は、エンジン2およびモータ6の間に配置されると共にクラッチトルクを制御できるクラッチ3と、このクラッチ3のクラッチトルクを制御する制御装置8とを備える。そして、制御装置8は、モータ6を動力源としたモータ走行時であって車輪11R、11Lにスリップが発生したときに、クラッチ3のクラッチトルクを増加させる。
(もっと読む)
燃料電池車両
【課題】車速毎に定められた総合近接騒音量を過不足なく発生させることができる燃料電池車両を提供する。
【解決手段】燃料電池2と、燃料電池2に空気を供給するエアポンプ10と、燃料電池2に水素ガスを供給する水素タンク3と、燃料電池2で発電した電気を蓄電するバッテリ16と、システム内の温度を調整する温度調整手段と、自車の車速を判定する車速センサ23と、追加騒音を発生させるスピーカー20と、自車の車速が所定範囲にある場合にスピーカー20を作動して追加騒音を発生させる電子制御装置30と、を備えた燃料電池システム1を搭載した燃料電池車両であって、電子制御装置30は、燃料電池システム1の構成要素から生ずる燃料電池システム起因音量と、スピーカー20が発生する追加発生音量との和が、車速毎に定められた総合近接騒音量となるようにスピーカー20を制御する。
(もっと読む)
バッテリの出力制御装置
【課題】ユーザの要求に応えつつ、バッテリ全体の寿命低下を抑制する。
【解決手段】車両は、複数の電池モジュール(電池セル)を含んで構成されるバッテリから供給される電力でモータを駆動させて走行する。ECUは、車両要求パワーP<バッテリの定格電力Wstdであると(S10にてNO)、モジュール接続数(モータに接続される電池モジュールの数)Nを最大数Nmaxとしつつ(S11)、バッテリの出力制限を行なう(S12)。一方、車両要求パワーPがバッテリの定格電力Wstdと最大電力Wmaxとの間に含まれる場合(S10にてYESかつS20にてYES)、ECUは、モジュール接続数Nを車両要求パワーPを満たす最小モジュール数N1としつつ(S50)、バッテリの出力制限を緩和する(S70)。
(もっと読む)
車両および電流検出装置の異常判定方法
【課題】電流センサの故障を容易に検出することができ、かつ、生産コストの上昇を抑制する。
【解決手段】MG−ECUは、電流Ivを検出する2つの電流センサの検出値Iv1とIv2とが一致する場合(S100にてYES)、電流Ivおよび電流Iwの各々の最大値および最小値を計測するステップ(S102)と、電流Ivおよび電流Iwの振幅をそれぞれ算出するステップ(S104)と、電流Ivの振幅と電流Iwの振幅とが一致する場合に(S108にてYES)、第1乃至第3の電流センサが正常状態であると判定するステップ(S110)と、電流Ivの振幅と電流Iwの振幅とが一致しない場合(S108にてNO)、電流Iwを検出する電流センサが異常状態であると判定するステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
電動車両の充電制御装置
【課題】2つのコンタクタの駆動回数差を解消する電動車両の充電制御装置を提供する。
【解決手段】溶着判定を行う電動車両の充電制御装置において、ある溶着判定の回では動作履歴がオフであるので、第1コンタクタ及び第2コンタクタが共にオンの状態から、第1コンタクタを2回断作動させると共に第2コンタクタを1回断作動させて、第1コンタクタ及び第2コンタクタの溶着判定を行い(a)、その次の溶着判定の回では動作履歴がオンであるので、断作動回数の大小を前回の判定時に対して逆転させて、第1コンタクタ及び第2コンタクタが共にオンの状態から、第1コンタクタを1回断作動させると共に第2コンタクタを2回断作動させて、第1コンタクタ及び第2コンタクタの溶着判定を行う(b)。
(もっと読む)
駆動装置
【課題】昇圧コンバータのリアクトルに流れる電流を検出する2つの電流センサの少なくとも一方に異常が生じているのをより適正に判定する。
【解決手段】昇圧コンバータ30のリアクトルLに流れる電流を検出する2つの電流センサ47a,47bにより検出された電流の差の絶対値に所定のローパスフィルタを適用して偏差ΔILを演算し、演算した偏差ΔILが閾値Iref以上のときに2つの電流センサ47a,47bの少なくとも一方に異常が生じていると判定する。そして、この閾値Irefは、モータMG1,MG2から出力すべき目標パワーP*の絶対値やモータMG1,MG2から出力されている出力パワーPの絶対値,モータMG1,MG2からのトルクTm1,Tm2の各絶対値,バッテリ26の充放電電流IBの絶対値,高電圧系の電圧VHが大きいほど大きくなる傾向に従って設定される値である。
(もっと読む)
物品搬送装置
【課題】台車ユニットの走行時に、外部からの操作により台車ユニットを停止させることができる物品搬送装置を提供すること。
【解決手段】搬送経路に沿って配設された走行レール3と、走行レール3を走行可能な台車ユニット4と、を備え、物品2を台車ユニット4に積載して搬送経路に沿って搬送する物品搬送装置1において、台車ユニット4は、台車ユニット4を走行させる駆動手段17と、駆動手段17に電力を供給する蓄電手段5と、蓄電手段5から駆動手段17に供給される電力の制御を行う制御回路29と、制御回路29に接続される台車用無線モジュール41と、を有し、台車用無線モジュール41は、受信される操作信号に基づいて、制御回路29の操作を行う。
(もっと読む)
鉄道車両用異常診断システム
【課題】鉄道車両に取り付けられたセンサユニットからの検出信号に基づいて脱線、転覆、衝突等の重大事故の異常を判定する異常判定装置に、定期検査で行われるような車両や軌道の異常を検知し処理する機能を付加した鉄道車両用異常診断システムを提供する。
【解決手段】先頭車両25及び最後尾車両26に加えて、中間車両27にも、6軸センサ50を備え、その測定値を車輪回転速度やGPS信号とともにMPU53で演算し、異常診断をする。脱線、転覆、衝突に至らなくても、定期検査で保守点検員の目視による調査や専用の異常診断装置によって行われていた車輪のフラット或いは車軸や軸受についての異常診断、乗り心地評価、或いは軌道の検査を、通常の営業車両で実行できるようになるため、人件費や設備投資の削減ができる。また、検査の頻度を格段に増やしてタイムリーに車両劣化診断を行うことができ、一層の安全向上を図ることができる。
(もっと読む)
車両の制御装置
【課題】スロットルバルブ13およびクランク角検出手段35,36が付設された多気筒型エンジン1を搭載した車両の制御装置100,200において、エンジン始動毎のクランク角計測基準位置の検出タイミングのばらつきを無くす。
【解決手段】クランキング開始によりエンジン回転数Neが始動判定値X以上になったときにエンジン1が始動したと判定する始動判定手段と、エンジン1の始動判定後に要求のエンジン回転数Neを確保するために必要な吸入空気量を算出する吸入空気量算出手段と、クランキング開始から所定時間以内にクランク角検出手段35,36からクランク角計測基準信号を受けたときに前記始動判定手段による処理を実行させずに待機し、クランキング開始から前記所定時間の経過後にクランク角計測基準信号を受けたときに前記始動判定手段による処理を実行させる始動制御手段とを実行する。
(もっと読む)
車両用ブレーキ装置
【課題】回生協調制動を行うと共に、回生制動の過剰使用に起因してABSが頻繁に作動してしまうことを抑制する。
【解決手段】前後輪の車輪速の最大値と前輪の車輪速の最小値との差および車体速度から相対スリップ率を求め、相対スリップ率が大きくなるほど減少する回生制動の係数を求めて、回生制動を行う。相対スリップ率の大きさが大きいほど回生制動の大きさを抑制する制御を行うことから、車両の前後方向や左右方向への荷重移動量を監視しなくても、回生制動が大きく効き過ぎることを防止でき、回生制動に起因する回生制動から油圧制動への不要な切換を防止でき、回生制動を有効に働かせることができる。
(もっと読む)
モータアッセンブリならびにハイブリッド車両用駆動装置およびその製造方法
【課題】簡素で低廉な部材構成および固定方法により回転角度センサのセンサ回転部材が相対回転したり軸線方向に移動したりしないように確実にかつ安定して取り付け、角度検出精度低下のおそれを解消したハイブリッド車両用駆動装置を提供する。
【解決手段】入力軸と、出力軸と、出力軸に一体的に連結されたロータおよびステータを有するモータと、環状をなす入力側回転部材と、環状をなす出力側回転部材と、センサ回転部材およびセンサ回転部材と成す角度を検出する固定部材を有する回転角度センサと、センサ回転部材および出力側回転部材のうちの一方から半径方向に突設された突起613と、センサ回転部材および出力側回転部材のうちの他方に形成された溝453と、センサ回転部材と出力側回転部材との相対回転を規制する規制部457と、を備える。
(もっと読む)
車両用制御装置
【課題】自動変速機により、アップシフトが行われている際に、ドライバからの制動要求があった場合に、制動要求に応じた制動力を適切に発生させることのできる車両用制御装置を提供すること。
【解決手段】モータジェネレータ20と、前記モータジェネレータと駆動輪54との間に介装され、締結要素の締結解放により複数の変速段を達成する自動変速機40と、摩擦力により制動力を発生する摩擦ブレーキと、を備える車両に対して制御信号を出力する車両用制御装置であって、ドライバからの制動要求に応じて、前記モータジェネレータによる回生制動および前記摩擦ブレーキによる摩擦制動を制御することで、回生協調制御を行う回生協調制御手段と、前記自動変速機により、アップシフトが行われている場合に、前記モータジェネレータによる回生制動を禁止する禁止手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
全方向移動型電動車両およびその制御方向
【課題】障害物回避動作を行う全方向移動型電動車両は、操作した方向と異なる方向に動作するため、操作者に対し強い違和感や不安感を抱かせるという問題がある。
【解決手段】車体部14と、操作者が操作した操作方向および操作量を検出する車体部14に設けた操作入力部13と、障害物までの距離および方向を検出する障害物センサ18と、操作入力部において検出される操作方向および操作量により操作力を算出する操作力推測部17と、障害物センサ18が検出した障害物までの距離に反比例し、かつ、障害物と反対方向に作用する仮想斥力を算出する仮想斥力算出部19と、操作力および仮想斥力の和より合力を算出する合力算出部20と、車体部14を操作力の方向から合力の方向へ回転させながら、合力の方向へ移動するよう制御する制御部21とを備えた構成である。
(もっと読む)
車載充放電装置
【課題】供給制御手段が設けられていない住宅に対しても、電動車両からの電力を供給することが可能な車載充放電装置を提供する。
【解決手段】蓄電部11と車両用電力変換部12と車両用供給管理部15とを備えて車載充放電装置1を構成し、車両用供給管理部15によって、蓄電部11から車両2の外部への電力の供給動作、および車両2の外部から蓄電部11への電力の供給動作を制御する。たとえば車載充放電装置1を搭載した車両2が住宅3に接続される場合、車両用供給管理部15によって、蓄電部11から住宅3への電力の供給動作、および住宅3から蓄電部11への電力の供給動作を制御する。これによって、たとえば、太陽光パネル33が発電できない夜間に商用電源が停電した場合、および住宅3に住宅用供給管理部35が設けられていない場合でも、車両2から住宅3に電力を供給して、車両2の電力を利用できるようにすることができる。
(もっと読む)
充電システムの制御装置およびそれを搭載する車両、ならびに充電システムの制御方法
【課題】パイロット信号に基づいて外部充電を行なう車両の充電システムにおいて、充電処理終了後にパイロット信号の発振が継続された場合に、充電制御の再開と停止とを繰り返すような不具合を解消する。
【解決手段】充電ケーブル300を介して外部電源402からの電力を用いて充電が可能な車両10における充電システムの車両ECU170は、充電動作を実行する充電制御部508と、パイロット信号CPLTに応答して充電制御部508を起動するための起動制御部507とを備える。充電制御部508は、充電動作の終了時の終了要因に基づいて、次回の充電動作の禁止または許可を決定する。
(もっと読む)
41 - 60 / 430
[ Back to top ]