
Fターム[5H180LL07]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 合図、警報を出力するもの (5,461) | 音による警報であるもの (2,307)
Fターム[5H180LL07]に分類される特許
121 - 140 / 2,307
運転支援装置
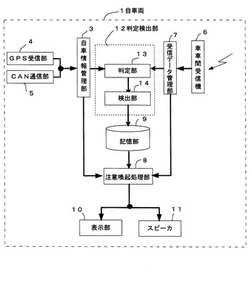
【課題】衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置において、ドライバに最適なタイミングで注意喚起が行なえるようにする。
【解決手段】検出部14により、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生を検出し、この検出に基づき、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生状況から学習し、実際に注意喚起のタイミングの補正が必要なときにのみ、注意喚起処理部8により、記憶部9の注意喚起のタイミングを自動的に的確に自車両1のドライバの運転行動の特性に応じた最適なタイミング補正し、次回の注意喚起のタイミングに、記憶部9の補正されたタイミングで表示部10、スピーカ11によって注意喚起を行なう。
(もっと読む)
情報提示装置

【課題】精度がより高く、且つ、実施がより容易であるとともに、コスト的な無駄をより抑えることを可能にしながらも、ドライバにとっての快適性をより損ないにくい情報提示装置を提供する。
【解決手段】注意喚起表示や警告表示にドライバが気づいたか否かの判定を行う行動判定部30を備え、情報提示制御部27は、行動判定部30で肯定判定を行ったことをもとに、注意喚起表示や警告表示の減衰表示への変化を表示部21に行わせ、行動判定部30は、表示部21に表示された注意喚起表示や警告表示にドライバが気づいた場合にドライバが行うスイッチ操作や運転操作によって生じる信号であるドライバ行動確認情報や車両情報をもとに上述の判定を行う。
(もっと読む)
車載装置
【課題】一方通行の道路において法令等により禁止されている方向にする車両の走行を適当に防ぎつつ、記憶容量の増加を極力抑えることができる車載装置を提供する。
【解決手段】車載装置1は、車両の現在地近傍にある一方通行の道路を抽出し、抽出された一方通行の道路において通行が許可されている方向を地図データの中から検索する。そして、その検索により得られた通行が許可されている方向に基づいて、車載装置1は車両が走行すべき方向を決定する。車載装置1は、その車両が走行すべき方向と現在車両が走行している方向とを比較し、その二方向が一方通行の道路を異なる方向であるかどうかを判定する。二方向が異なる方向であると判定されたとき、車載装置1は音や画像を用いた報知を行い、運転手に警告を行う。
(もっと読む)
車両用警報装置
【課題】車両と人間との接触を確実に回避することが可能な車両用警報装置を提供する。
【解決手段】車両用警報装置10は、スピーカ12と受信部13と物体検知部15と出力制御部16とを備える。スピーカ12は、車両1の外部へ超音波と可聴音波とを出力可能である。受信部13は、スピーカ12が出力した超音波の反射波を受信する。物体検知部15は、受信部13が受信した反射波に基づいて車両の周囲の所定範囲の物体を検知する。出力制御部16は、物体検知部15が物体を検知したときに、スピーカ12から可聴音波を出力させる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】 自車前方に存在する走行規制に対し注意を喚起する「運転支援装置、運転支援方法および運転支援プログラム」を提供する。
【解決手段】 本発明の運転支援装置は、自車Mが走行している道路前方に存在する一時停止60、62に関する情報を配信装置30からの無線により受信する受信手段と、自車前方を撮像する撮像カメラと、撮像データに基づき自車前方の視界の良否を判定する判定手段と、自車前方の視界が不良であると判定されたとき、一時停止が存在することを知らせる警報を提示する提示手段とを有する。
(もっと読む)
情報処理装置、車載装置、情報処理システム、情報処理方法、および、プログラム
【課題】ドライバー個人の運転技量などの内的要因を考慮して、ドライバー通知を行うか否かを判断する技術を提供することを目的とする。
【解決手段】地点で生じやすい走行状態と当該地点の運転レベルとの関連性を判定し、このアドバイス情報を提供すべき複数のユーザごとに、ユーザの運転レベルを記憶する。そして、複数のユーザのそれぞれの運転レベルに応じて、複数の地点ごとのアドバイス情報を選択する。この選択は、アドバイス情報の選択対象となる地点に関して、走行状態と前記運転レベルとの関連性があると判定された場合は、当該ユーザの運転レベルに応じたアドバイス情報を選択し、走行状態と運転レベルとの関連性がないと判定された場合は、当該ユーザの運転レベルと関連しないアドバイス情報を選択する。これにより、ドライバーの運転技量に応じたアドバイス情報を選択できる。
(もっと読む)
ナビゲーション装置
【課題】運転開始時のサポート機能を簡易に具備したナビゲーション装置を提供する。
【解決手段】地図を用いて車両の位置を検出する制御部を備え、この制御部は、飲酒の可能性がある地域に所定時間以上、停車したことを検出したら(ステップS1〜S5)、運転開始時に警告処理を行う(ステップS6)。
(もっと読む)
ナビゲーション装置及びレーン変更案内方法
【課題】レーン変更先の走行レーンにおける車両走行速度と自車両の走行速度との差が大きい場合であっても、運転者が安全にレーン変更を行うことが可能な「ナビゲーション装置およびレーン変更案内方法」を提供する。
【解決手段】経路案内すべき交差点から自車位置までの間に複数のレーンがある道路が含まれている場合であって、かつ、複数の走行レーンのうち互いに隣り合う各組の隣接走行レーンの中に車両走行速度の差分が所定値以上となる隣接走行レーンが存在する場合、通常のタイミングよりも経路案内のタイミングを早くするように制御することにより、レーン変更先の走行レーンにおける車両走行速度に自車両の走行速度を合わせるための距離を長く確保できるようにする。
(もっと読む)
車両周囲表示装置、車両周囲表示方法
【課題】 従来、車載装置において、車両の周囲を画像として表示するとともに、コーナーセンサー等により障害物の存在を検知して、車両の周囲の画像上に当該コーナーセンサーが障害物を検知した旨の表示を行う技術がある。しかし、そのような技術では、障害物が付近に存在することを示すことはできるが、運転者は障害物の具体的な形状をイメージし難い。
本発明の目的は、運転者に車両の周囲の立体物の配置状況をよりわかりやすく示す技術を提供することにある。
【解決手段】
本発明の車両周囲表示装置は、車両の周囲を撮像するとともに車両の周囲に存在する立体物の高さを検知して、立体物の高さが車両にとって危険な高さにある場合に、画像に含まれる危険な障害物を特徴付けて表示する。
(もっと読む)
車両制御装置
【課題】状況に応じて適切な走行経路を設定することのできる車両制御装置を提供する。
【解決手段】車両周辺の物体に対する第一危険度D1を演算する第一危険度演算部21と、交通規則に対する第二危険度D2を演算する第二危険度演算部22と、を備え、第一危険度D1が所定の閾値以上になる場合、第二危険度D2が、第一危険度D1に対して相対的に下がるように演算する。すなわち、交通規則に対する第二危険度D2に比して物体に対する第一危険度D1を優先的に判断することができる。このような第一危険度D1及び第二危険度D2に基づくことによって、物体に対する危険度が高くなる状況において、物体を回避することを優先させた走行経路を設定することができる。
(もっと読む)
車両周辺監視装置
【課題】 赤外線カメラにより温度一様表面を有するデバイスを用いることなく、グレースケール画像中の対象物の輝度(輝度値)を推定することを可能とする車両周辺監視装置を提供する。
【解決手段】
予め求めておいた路面温度Trと外気温Taの対応関係の特性102に基づき検出した外気温Taから推定される路面温度Trと、この路面温度Trに対応するグレースケール画像中の路面領域の輝度(路面輝度という。)との対応関係から、グレースケール画像中の対象物の輝度(輝度値)を推定する。
(もっと読む)
誤認識防止装置
【課題】車載カメラの撮影画像を処理するだけの安価な構成で、影と障害物とを区別し、誤認識を防止して障害物を認識できる技術を提供する。
【解決手段】取得手段6aにより取得された各フレームの撮影画像が変換手段6bにより上方視画像に射影変換されて、各フレームの上方視画像それぞれの略同じ路面領域の水平エッジヒストグラムのピーク形状に関する特徴が抽出手段6cにより抽出される。そして、各フレームの抽出された特徴が相似するか否かから同一領域の影と障害物とが区別され、誤認識が防止されて障害物が認識手段6dにより認識されるため、単眼カメラ3の撮影画像を処理するだけで、影と障害物とを区別し、誤認識を防止して障害物を認識できる。しかも、車載レーダなどの高価な測定機器を車両に搭載する必要がないため、安価な構成とすることができ、コストダウンを図ることができる。
(もっと読む)
車両用警告装置
【課題】この発明は、自車両に接近する対象物の存在を、運転者の視線移動に時間をかけさせることなく、明確に認知させることができる車両用警告装置を実現することを目的とする。
【解決手段】この発明は、車室内の前方中央に配置された第1の表示部及び第1の警報出力部と、車室内の前方右側に配置された第2の表示部及び第2の警報出力部と、車室内の前方左側に配置された第3の表示部及び第3の警報出力部と、自車両に接近する対象物と衝突する可能性があるかどうかを判定する衝突可能性判定手段と、前記衝突可能性判定手段により自車両に接近する対象物と衝突する可能性があると判定された時に、前記第1〜3の表示部のうち対象物の存在する方向に対応して配置された表示部のみを点滅させ、前記第1〜3の警報出力部のうち対象物の存在する方向に対応して配置された警報出力部のみから警報を出力させるように制御する制御手段とを備えることを特徴とする。
(もっと読む)
危険回避システム及び方法
【課題】移動体と接触する危険性が無い対象に対する不要な回避措置を効率的且つ確実に防ぐ。
【解決手段】移動体の位置を予測する移動体位置予測手段2と、対象の位置を予測する対象位置予測手段3と、前記移動体の周辺に前記対象が実際に存在するか否かを検知する対象検知手段4と、前記対象検知手段4により前記対象の存在が検知された場合に、前記移動体と前記対象との接触を回避するための措置を実行する回避措置実行手段5と、予測された前記移動体の位置情報、予測された前記対象の位置情報、前記移動体の移動に関する情報、及び前記対象の移動に関する情報に基づいて、前記対象検知手段4が前記対象を検知する処理を優先的に実行する優先サーチエリアを設定する優先サーチエリア設定手段6とを備える。
(もっと読む)
情報処理装置、車載装置、情報処理システム、情報処理方法、および、プログラム
【課題】ドライバーのための具体的な危険回避のためのアドバイス情報を選択する技術を提供する。
【解決手段】 複数の地点ごとに対応付けられた検知情報及び状態情報に基づいて複数の地点に応じたアドバイス情報を選択する選択手段を備えており、この選択手段は、検知情報の複数の項目のうちの一つを代表検知項目として選択する第1手段と、代表検知項目に関連する前記複数種類の状態情報の一部種類を選択する第2手段と、一部種類の状態情報の項目のうち、所定の条件を満足する項目を代表状態項目として選択する第3手段と、代表検知項目及び前記代表状態項目に基づいて、アドバイス情報を選択する第4手段と、を備えるこれにより、ドライバーのための具体的な危険回避のためのアドバイス情報を選択できる。
(もっと読む)
車載装置
【課題】SA/PAから導入路への逆走を効果的に防止する。
【解決手段】車載装置は、SA/PA300に進入するための導入路302と高速道路301との分岐点311を中心にした扇形の範囲を逆走判定範囲312aまたは312bとして設定し、自車位置310が逆走判定範囲312aまたは312bの内側にあるかどうかを判定する。自車位置310が逆走判定範囲312aまたは312b内にあると判定された期間における走行距離を取得し、その走行距離が閾値を越えている場合に車両が逆走しようとしていると判定し、乗員に警告を行う。
(もっと読む)
道路形状検出装置、走行制御装置、及び道路形状検出方法
【課題】認識しているカーブ数のハンチングを抑制する。
【解決手段】各カーブ区間の入口補間点について、演算周期における前回の演算結果と比較し、カーブ区間数が変動しているか否かを判定し(ステップS5)、カーブ区間数が変動していたら、前回のカーブ情報と自車両の移動量とに基づいて、今回のカーブ情報を補正する(ステップS6)。先ず、カーブ区間が減少しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ増加させる。一方、カーブ区間が増加しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ減少させる。すなわち、今回のカーブ情報を、前回の配列に戻す補正を行うことで、前回のカーブ区間数を保持する(ステップS62)。
(もっと読む)
運転支援装置
【課題】より自車が走行する状況に応じて、自車が経路上を走行するための規範となる運転支援を行なうことが可能な運転支援装置を提供する。
【解決手段】ECU20が、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車100が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出し、抽出したパラメータそれぞれの時間変化率に基づいて、自車100が経路上を走行するための規範となる規範速度を算出する。このため、経路の道路形状に対応した経路上の移動に関する2以上のパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車100が走行する状況に応じた規範速度を提供することが可能となる。
(もっと読む)
運転アシストシステム
【課題】エコモード設定による加速不足で、交通の流れを悪くしてしまうなどの問題を解消する運転アシストシステムを提供する。
【解決手段】本発明は、エネルギーをセーブして走行するエコモードを備える車両に搭載される運転アシストシステムであって、周辺車両の走行状況を取得する周辺車両走行状況取得手段と、前記車両の外界と重畳させるように画像を表示する表示手段と、前記表示手段に表示する前記車両の予測到達位置を算出する位置算出手段(ステップS112)と、前記周辺車両走行状況取得手段によって取得された前記周辺車両の走行状況と、前記位置算出手段によって算出された前記車両の予測到達位置とから、前記車両が前記周辺車両と接触する可能性があるか否かを判定する判定手段(ステップS114)と、前記判定手段によって前記車両が前記周辺車両と接触する可能性があると判定されたときに警告を行う警告手段(ステップS115)と、を有することを特徴とする。
(もっと読む)
障害物認識装置
【課題】車載カメラの撮影画像の障害物候補が、自車両周辺の障害物であるのか影であるのかを、安価な構成で撮影画像を処理するだけで正確に認識できる技術を提供する。
【解決手段】単眼カメラ3の撮影画像から障害物候補が検出手段6aにより検出される。そして、走行路に投影された影の内部は平坦でべた状であることから、障害物候補の画像の特徴の内部が平坦になるか否かから、障害物候補が影であるのか障害物(他車両)であるのかが認識手段6bにより認識されるため、単眼カメラ3の撮影画像の障害物候補が、自車両1周辺の障害物(他車両)であるのか影であるのかを、撮影画像を処理するだけで正確に認識できる。しかも、車載レーダなどの高価な測定機器を自車両1に搭載する必要がないため、安価な構成とすることができ、コストダウンを図ることができる。
(もっと読む)
121 - 140 / 2,307
[ Back to top ]