
Fターム[5H301BB05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 物品搬送用 (624)
Fターム[5H301BB05]の下位に属するFターム
Fターム[5H301BB05]に分類される特許
1 - 20 / 563
無人搬送システム
サービス制御システム、サービスシステム
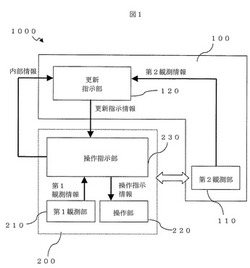
【課題】機械が実世界の状態に基づき実世界に対し有用な働きかけを行うサービスシステムにおいて、環境条件や目的等が変化したときでも、その働きかけがより適切なものとなるように変化させる。
【解決手段】本発明に係るサービス制御システムは、実世界インターフェースシステムが備える第1観測部とは異なる物理環境を観測する第2観測部を備え、実世界インターフェースシステムが第1観測部の観測結果に基づき動作した場合と第2観測部の観測結果に基づき動作した場合との間の差分が小さくなるように、実世界インターフェースシステムの動作を調整する。
(もっと読む)
無人搬送車による台車の自動搬送システム

【課題】簡易な機械式の構成で実施する、無人搬送車による台車の自動搬送システムを提供する。
【解決手段】無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2との組み合わせで構成され、無人搬送車1は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車2まで進み、最先順位の台車2の被牽引具5における牽引用フラップ53へ牽引ピン4が突き当たった段階で同台車2の牽引を開始し、次順の台車2と連結した連結具7が連結解除ドグ9の位置へ到達した段階で前記連結を解除され、無人搬送車1はそのまま最先順位の1台の台車2を牽引して前進走行する。
(もっと読む)
無人車両
【課題】誘導ラインが途中で断線していたとしても、姿勢角を修正しながら安定して走行し続けることができる無人車両を提供する。
【解決手段】本発明に係る無人車両10は、車長方向に延びる車体中心線上に離間して設けられ、路面の画像データをそれぞれ出力する第1撮像手段11aおよび第2撮像手段11bと、画像データに基づいて姿勢角を算出する姿勢角算出部13と、姿勢角が目標値になるように車輪15の操舵角を制御する操舵制御部14とを備える。姿勢角算出部13は、第1撮像手段11aおよび第2撮像手段11bから出力された2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第1算出動作、および第1撮像手段11aまたは第2撮像手段11bから出力された1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第2算出動作を選択的に行う。
(もっと読む)
自動搬送システム
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
搬送車システム
【課題】経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供すること。
【解決手段】経路140と、複数の搬送車300と、複数の搬送車300の制御を行うコントローラ120とを備える搬送車システム100であって、MCS120は、搬送要求を受信する通信部121と、進入禁止区間を示す区間情報および予備期間を示す予備期間情報を記憶する記憶部122と、搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部125と、当該搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地を決定する代替目的地決定部126と、決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する指令送出部127とを備える。
(もっと読む)
移動体の自己位置判別装置
【課題】位置判別演算開始点における移動体の進行方向角度(方位)を実際に移動するエリヤに設定した角度(方位)に対して誤差が少なく簡単に合わせることのできる移動体の自己位置判別装置を得る。
【解決手段】移動体10の両側面に移動体10の進行方向に直角に光電センサ12、13を取り付け、光電センサ12、13の光を反射するための反射板14、15を、移動エリヤの倉庫入口1の両側に、光電センサ12、13の光軸と対向するように設置する。倉庫入口1を移動車10が通過するときの光電センサ12、13の動作時間差を利用して通過時の角度を算出する。
(もっと読む)
物品処理設備
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム
【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
自動追尾式自走台車
【課題】差動式キャスタを備えた自走台車において、自動追尾機能を有する自動追尾式自動台車を提供する。
【解決手段】自動追尾式自走台車1は、差動式キャスタ(31,32,33)と、自動追尾装置と、を備える。差動式キャスタ(例えば、31)は、互いに独立して回転駆動する第1および第2の駆動輪(30e,30f)を有し、台車本体2に対して駆動方向を自在に可変することができる。そして、自動追尾装置は、被追尾体Pに対する台車1の距離および角度に関する情報を検出する検出手段(11,12)と、検出手段(11,12)により検出された情報に基づき台車1が走行すべき方向、および走行または停止を決定するとともに、決定された情報に基づき差動式キャスタ(31,32,33)に制御電流を供給する制御装置20と、を備える。
(もっと読む)
搬送車システムのシミュレーションシステムとシミュレーション方法
【課題】
共通のシミュレーション結果に対し、複数の端末で各々の観点から解析を行う。
【構成】
処理装置間でワークを搬送する搬送車システムをシミュレーションする。搬送車システムでの複数の仮想的な搬送車の走行をシミュレーションし、シミュレーションにより得られたデータと搬送車システムの背景画像とを複数の端末へ送信する。各端末は、データを画像として表示する搬送車システム内のエリアと時間の範囲とを端末毎にユーザが指定し、指定された範囲内のデータを画像化すると共に搬送車システムの背景画像と合成し、合成された画像をモニタに表示する。
(もっと読む)
無人搬送車
【課題】SLAM技術を用いた無人搬送車であっても、古典的な誘導方法で走行する無人搬送車と同様に簡単な方法で走行制御の破綻を監視することができる無人搬送車を提供すること。
【解決手段】SLAM技術を用いて現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行し、経路データ123と無人搬送車1の現在位置とのずれを補正するための旋回角θ及び無人搬送車1の進路方向が目標位置に向くための操舵角ρを無人搬送車1が経路データ123に沿って走行するように補正しながら制御する制御手段10と、制御手段10による補正量の変動を監視するとともに、補正量が外乱によって制御可能な範囲を逸脱したときに走行を停止する監視手段11とを備える。
(もっと読む)
自動搬送車及びそれを用いた自動搬送車システム
【課題】自動搬送車や移動ロボットを用いる搬送システムにおける搬送の効率を向上するために、システム中の自動搬送車や移動ロボットに被搬送物として台車を連結し、牽引させた場合、自動搬送車ないし移動ロボットの本体と台車が接触するなどの干渉をおこし、従来よりも搬送の効率を低下させる場合がある、という問題がある。本発明では、上記の問題を解決することを課題とする。
【解決手段】上記課題を解決するために、本発明の自動搬送車100は、自機を移動させる移動機構101と、台車200と連結および切り離しができる連結機構106と、台車200が連結されているか否かを検出する連結検出センサ107と、自機の周囲の情報を取得する外界センサ104と、上記移動機構101の制御を行う制御装置105と、を備え、台車200が連結されている場合には、台車200が連結されていない場合と異なる走行経路を走行することを特徴としている。
(もっと読む)
リモートコントロール方法及びリモートコントロールシステム
【課題】コスト高を招くことなく、目視できない状況下でも、移動体を直感的に操縦できるリモートコントロール方法及びリモートコントロールシステムを提供する。
【解決手段】移動体20、は、常に操縦者HMの視線方向(基準方向)と平行に、その前方を向けており、よって例えば視線方向に対して右に角度δの方向に進行したい場合、それに応じた操舵量だけ進行方向を操作する操縦装置のスティックを視線方向に対して右に角度δの方向に倒せばよい。
(もっと読む)
処理設備
【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
移動体システムと移動体の走行制御方法
【課題】
カーブ区間で移動体の位置を正確に求め、移動体を高い精度で移動させる。
【構成】
移動体の走行への制御中心から、移動体の走行方向とは異なる方向にシフトした位置で、走行方向に沿った移動体の位置を検出する検出器を設ける。移動体の走行経路中の少なくともカーブ区間に対して、検出器の出力に対する制御中心の走行方向に沿った位置を記憶部に記憶し、記憶部から読み出した制御中心の位置に基づき、移動体の走行を制御部により制御する。
(もっと読む)
自動走行車および自動走行システム
【課題】走行位置検出におけるノイズの影響を受けにくく、トラブル発生時の再発車等も容易な自動走行車を用いた自動走行システムを提供する。
【解決手段】自動走行車1は、走路上の走行が可能な車台部10と、走路上に設けられた誘導線21を検出する誘導線センサ2と、誘導線センサにより検出された誘導線に沿って車台部を走行させるとともに、誘導線に設けられた制御情報24,25を読み取る情報読み取り部を備えたコントローラ4と、走路上に誘導線とは別に設けられた色ガイド31,32の色を検出する色センサとを有する。コントローラは、色センサにより検出された色ガイドの色と情報読み取り部により読み取った制御情報とに応じて車台部の制御を行う。
(もっと読む)
無人搬送車および走行制御方法
【課題】運用が容易な無人搬送車および走行制御方法を提供する。
【解決手段】自身が走行する経路の情報である経路データ133に沿って走行する無人搬送車であって、自身の目的地に関する情報を取得し、現在位置を始点とし、目的地を終点として有する基本経路データ134がメモリデータ130に存在するか否かを判定し、存在しない場合、現在位置を始点として有する基本経路データ134をデータメモリ130から取得する取得処理と、取得した基本経路データ34の終点を新たな始点とする別の基本経路データ134をデータメモリ130から新たに取得して、終点を目的地に向けて、順に伸ばしていくつなぎ処理を、新たに取得した別の基本経路データ134の終点が、目的地に一致するまで実行し、取得した各基本経路データ134を経路データ133とするつなぎ処理部120を有することを特徴とする。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線(600)を有する軌道(100)と、軌道を走行する複数の台車(200)と、誘導線管理装置(700)とを備える。複数の台車の各々は、送信部及び受信部(910,920)と、走行制御部(205)とを備える。誘導線管理装置(700)は、誘導線受信部及び誘導線誘導線送信部(710,720)と、特定台車(250)の第1の無線信号受信部(930)に対して無線信号を送信可能な第1の無線信号送信部(740)とを備えており、一の誘導線領域に一の特定台車を優先させて進入させる場合に、一の誘導線にブロッキング信号を送信すると共に、一の特定台車に対して一の誘導線領域内への進入を許可する許可信号を送信する。
(もっと読む)
搬送台車及び搬送台車システム
【課題】
搬送台車を安全に移動できるようにする。
【構成】
搬送台車は走行車輪を走行モータにより駆動すると共に、ブレーキによりロックし、搬送台車の前面の下端近傍もしくは後面の下端近傍に設けられ、押し棒が搬送台車に当接もしくは近接していることを検出すると、検出信号を出力する押し棒センサと、検出信号がオンするとブレーキのロックを解除すると共に、検出信号がオフするとブレーキをロックする制御部、とを備えている。
(もっと読む)
1 - 20 / 563
[ Back to top ]