
Fターム[5H505GG04]の内容
交流電動機の制御一般 (51,584) | 制御系 (3,480) | 電流フィードバックするもの (1,845)
Fターム[5H505GG04]に分類される特許
21 - 40 / 1,845
モータ制御装置、歩行補助装置及びモータ制御方法
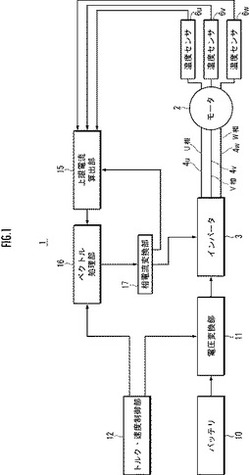
【課題】モータコイルの過熱を防止するモータ制御装置において、コイル温度が上限を超えないことを保証しつつ、コイル温度の上限を保証上限温度に十分近い値に設定して、コイル電流の制限に因るモータ性能の低下を抑止する。
【解決手段】上限電流算出部15は、温度センサ6u,6v,6wが検出した各相コイルの温度に基づいて各相において第1の所定時間後のコイル温度が上限温度以下に留まる上限値を、第1の所定時間より短い第2の所定時間の経過ごとに算出する。ベクトル処理部16は、目標コイル電流に対応する目標ベクトルの長さを、上限電流算出部15が算出した各相の上限値の内の最小のものに対応する長さ以内になるように補正する。相電流変換部17は、補正後の目標ベクトルに基づいて各相電流値を算出し、インバータ3を介してモータ2の各相電流を制御する。
(もっと読む)
モータ制御装置

【課題】スイッチング損失およびサージ電圧を抑制しつつ、小型化、および製造コストの低減化を達成することのできるモータ制御装置を提供する。
【解決手段】第1のFET51と第2のFET52との接続点14が、第1のリレー11を介して電動モータ1のU相界磁巻線3Uに接続されている。接続点14と第2のFET52との間に第1のインダクタ21が接続されている。制御部5は、第1のリレー11に回生電流i1が流れているときに、第1のリレー11をターンオフする。これにより、第1のインダクタ21に、回生電流i1の変化を妨げる方向に誘起電圧Vbが生じる。この結果、第1のFET51のソース電位が高くなるので、第1のFET51に端子間電圧が低減される。第1のFET51に端子間電圧が低減した状態で、第1のFET51がターンオンされる。
(もっと読む)
永久磁石同期電動機のd軸電流を制御するモータ制御装置
【課題】過熱による永久磁石同期電動機の永久磁石の熱減磁が生じる事態を回避することができるモータ制御装置を提供する。
【解決手段】q軸電流及びd軸電流検出部11は、q軸電流Iq及びd軸電流Idを、U相電流IU、V相電流IV及びW相電流IW及びロータ52の回転角度θに基づいて検出する。q軸電流指令値生成部12は、q軸電流指令値Iqcomを速度指令値ωcomに基づいて生成する。d軸電流指令値生成部13は、永久磁石同期電動機5の定常時における永久磁石54a,54b,54c,54dの温度上昇量が最小になるd軸電流指令値Idcomを、ロータ52の回転速度ωに基づいて生成する。
(もっと読む)
交流電動機の制御装置
【課題】パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音の官能上の感度を低減する。
【解決手段】ECU3は、モータの回転に伴って発生する雑音の周波数成分であり、且つ、その周波数がモータの回転数整数倍である高調波の周波数成分のうち、振幅が最大である高調波の周波数を求める周波数算出部35と、パルス幅過変調制御方式による制御を実施するときのキャリア周波数を、周波数算出部35によって求められた高調波の周波数に設定する周波数設定部36と、を備える。
(もっと読む)
電力変換装置
【課題】電力変換装置に含まれる回路の故障箇所を特定することができる電力変換装置を提供する。
【解決手段】 電源の正負両端に接続される電源線P、Nの間に、接続されたスイッチング素子Q1〜Q6と、スイッチング素子Q1〜Q6の順方向導通時に流れる電流の向きと逆方向で、スイッチング素子Q1〜Q6と並列に接続されたダイオードD1〜D6と、スイッチング素子Q1〜Q6の低電位側端子とダイオードD1〜D6のアノード端子との接続点よりもスイッチング素子側に接続され、電流を検出する電流検出手段と、電流検出手段によって検出された検出電流に基づいてスイッチング素子Q1〜Q6の故障を検出する故障検出手段とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】インバータのFETの駆動を簡易な構成と制御で安定的に行い得るようにした電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいて、FETブリッジで成るインバータ106によりモータ20を駆動制御し、操舵系をアシスト制御するようになっている電動パワーステアリング装置において、FETブリッジの上段FETを駆動するための昇圧電源電圧を生成するチャージポンプ回路130及びブートストラップ回路140を具備し、高い方の電圧を昇圧電源電圧とする。
(もっと読む)
電力変換装置
【課題】エンジン発電機による電動機駆動システムにおいて、電力変換器の高調波や直流電圧変動の影響によって、d軸とq軸の電圧外乱による電流脈動の強めあい現象により軸振動が増加し、dq軸間干渉の影響により振動やd軸電流が増加する恐れがある。
【解決手段】エンジン発電機システムの電力変換器105において、発電機104の回転子磁束方向のd軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにd軸電圧調整手段117により発電機104を制御するためのd軸電圧Vd*をΔVd*調整し、さらに、q軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにq軸電圧調整手段118によりq軸の電圧Vq*をΔVq*調整する。
(もっと読む)
無効電流指令作成部を有するモータ駆動装置
【課題】入力された交流を直流に変換する直流変換部と、直流変換部が出力した直流をモータの駆動のための交流に変換する交流変換部と、を備えるモータ駆動装置において、過電圧異常を抑制することができる、制御が容易で低コストおよび省スペースのモータ駆動装置を実現する。
【解決手段】モータ駆動装置は、入力された交流を直流に変換する直流変換部11と、直流変換部11が出力した直流をモータ3の駆動のための交流に変換する交流変換部12と、直流変換部11の直流出力側の電圧を検出する電圧検出部13と、電圧検出部13が検出した電圧が所定の閾値を超えたとき、交流変換部12が無効電流を出力するよう制御してモータにおける消費電力を増加させる数値制御部14と、を備える。
(もっと読む)
車両駆動用誘導電動機の制御装置
【課題】トルク推定の精度を向上させることができる、車両駆動用誘導電動機の制御装置。
【解決手段】上位コントローラ110から入力されるトルク指令Tmrefおよび二次磁束指令φ2refに基づいて、車両駆動用誘導電動機108を高周波駆動するインバータ107に制御信号を出力するモータコントローラ109は、インバータ107の駆動周波数ω1を設定する一次周波数演算部219と、誘導電動機108の三相電流値を検出するモータ電流値検出部209と、検出された三相電流値をd軸電流値Idおよびq軸電流値Iqに変換する座標変換部223と、誘導電動機108の出力トルクを推定するトルク推定部211と、を備え、トルク推定部211は、モータ電流値検出部209による電流検出からトルク推定までの電流位相変化を補正する位相補償量と、d軸電流値およびq軸電流値とに基づいて、出力トルクTmを推定する。
(もっと読む)
自動車
【課題】モータに過電圧が作用したり過電流が流れたりするのを抑制する。
【解決手段】駆動輪の回転数の減少時に、モータを駆動するインバータの制御方式を矩形波制御方式から過変調制御方式に切り替える矩形波過変調切替条件が成立したときにおいて(S530,S540)、駆動輪の回転数減少率ΔNwが所定値Nref以下のときには過変調制御方式に切り替え(S600)、駆動輪の回転数減少率ΔNwが所定値Nrefより大きいときには過変調制御方式を経由せずに正弦波制御方式に直接切り替える(S610)。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータの速度制御を行う速度PI制御部303と、モータが一定速度で回転しているときの速度制御部の出力に基づく電圧指令値を測定する電圧測定部と、測定された電圧指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ駆動回路
【課題】駆動コイルにブレーキ電流が流れたとき、回生電流が電源に向かって供給されることによる電源電圧の上昇を抑え、電源の損傷やIC等の耐圧破壊を防止する。
【解決手段】第1シンク側トランジスタ14から第2ソース側トランジスタ11の方向へ、又は、第2シンク側トランジスタ13から第1ソース側トランジスタ12の方向へ流れる逆方向電流を検出する検出回路と、検出回路が逆方向電流の検出を開始してから所定期間、検出回路の検出出力を無効にする無効回路と、検出回路が逆方向電流の検出を開始してから所定期間が経過した場合、検出回路の検出出力に従って同期整流を禁止する第1禁止回路と、第1又は第2シンク側トランジスタをオンするPWM信号の各オンデューティ期間が所定期間よりも短い場合、第1禁止回路の動作に関わらず、同期整流を禁止する第2禁止回路とを備える。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
洗濯機
【課題】モータのみの損失最小化だけでなく、モータ駆動における動作領域での洗濯機全体での損失を最小化した洗濯機を提供すること。
【解決手段】衣類を収納するドラム3と、ドラム3を駆動するモータ12と、モータ12とドラム3を特定の減速比で減速させる減速機構部6と、モータ12を制御する制御部13とを備え、制御部13は、モータ損失を算出する第1損失算出部201と、減速機構部6の減速損失を算出する第2損失算出部202と、制御部13の駆動部132が損失する駆動損失を算出する第3損失算出部203とを備え、制御部13は、ドラム3に加わる動作領域の負荷条件で、第1損失算出部201および第2損失算出部202および第3損失算出部203の合計が常に最小となるようにd軸電流とq軸電流とからなるモータ電流を調整することで、洗濯機全体の損失を最小化することができる。
(もっと読む)
回転電機制御装置
【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、前記モータを一定速度で回転させ、一定電流量のd軸電流を流す速度指令値に基づいてモータの速度制御を行う速度PI制御部303と、モータが一定速度で回転し、一定電流量のd軸電流が流れているときの速度制御部の出力に基づく電流指令値を測定する電流測定部402と、測定された電流指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
電力変換装置
【課題】還流ダイオードに流れる電流の振動によって発生するノイズを抑制する電力変換装置を提供する。
【解決手段】複数のスイッチング素子Q1〜Q6と還流ダイオードD1〜D6とを有し、前記複数のスイッチング素子Q1〜Q6のオン及びオフを切り換えることで、入力された電力を変換し、負荷に出力する電力変換回路と、前記複数のスイッチング素子Q1〜Q6を駆動する駆動回路20と、前記電力変換回路及び前記駆動回路20を制御する制御手段とを備え、前記制御手段は、前記電力変換回路から前記負荷に供給される供給電流が0アンペア付近にある場合に、前記スイッチング素子Q1〜Q6をターンオンさせる際のスイッチング速度を、前記供給電流が0アンペア付近ではない場合のスイッチング速度より低下させる。
(もっと読む)
回転電機制御装置
【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
21 - 40 / 1,845
[ Back to top ]