
Fターム[5H572DD01]の内容
Fターム[5H572DD01]に分類される特許
1 - 20 / 202
倒立型移動体、その制御方法、及びプログラム
【課題】小型の抵抗に維持しつつ回生電力を効果的に消費すること。
【解決手段】倒立型移動体は、姿勢情報を検出する姿勢検出手段と、車輪を駆動する駆動手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第1制御ゲインを乗算して駆動手段を駆動するための第1制御信号を生成する第1制御手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第2制御ゲインを乗算して駆動手段を駆動するための第2制御信号を生成する第2制御手段と、回生電圧が所定閾値以上であるか否かを判定する判定手段と、を備える。駆動手段は、第1制御手段から出力される第1制御信号と、第2制御手段から出力される第2制御信号と、に基づいて前記車輪を駆動する。第1及び第2制御手段は、判定手段により回生電圧が所定閾値以上であると判定されたとき、第1及び第2制御ゲインのうち一方の符号を反転させて、第1及び第2制御ゲインを変更する。
(もっと読む)
電動シート用制御装置

【課題】本発明は、電動シート用制御装置に係り、駆動すべきすべてのモータの全作動時間を短縮させつつ、モータの起動時又は停止時に発生するPWMノイズが車両ノイズとして外部に放出されるのを抑制することにある。
【解決手段】シートの形状又は位置を可変するために設けられた複数のモータと、モータごとに設けられ、該モータをPWM駆動するPWM駆動手段と、上記のPWM駆動手段によるモータの起動時及び停止時に該モータの速度を徐々に変化させる速度制御を実行する速度制御手段と、を備え、少なくとも一の前記モータの停止時における前記速度制御と他の前記モータの起動時における前記速度制御とが実行される場合、前記速度制御手段は、該2つ以上の前記モータに対する互いの前記速度制御のタイミングを一致させ、かつ、前記PWM駆動手段は、該2つ以上の前記モータをPWM駆動するうえでの位相を互いに逆相とする。
(もっと読む)
インクジェット記録装置およびモータ制御方法
【課題】複数のモータを動作させる際の駆動電流の急峻な変化を抑えるインクジェット記録装置を提供する。
【解決手段】記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータとを備えるインクジェット記録装置において、キャリッジを停止状態からインク吐出による記録時の目標速度まで加速する加速期間に、ファンの回転数を低下させるようにファンモータを制御する。
(もっと読む)
サーボドライブシステム
【課題】 サーボ制御の制御応答性を高め、制御装置の各軸の特性に応じて、制御演算部をサーボアンプ又はサーボコントローラに分配可能なサーボドライブシステムを提供する。
【解決手段】 本発明のサーボドライブシステムは、軸毎にサーボモータを制御するサーボ制御部が、サーボモータの指令を生成するプロファイル生成部と、サーボモータの位置を制御する位置制御部と、サーボモータの速度を制御する速度制御部と、サーボモータのモータ電流を制御する電流制御部と、を有し、プロファイル生成部、位置制御部、速度制御部及び電流制御部は、軸毎にサーボアンプ又はサーボコントローラにそれぞれ分配されている。
(もっと読む)
同期制御システム
【課題】コントローラ装置の制御周期Tcがドライブ装置の駆動周期Tdの整数倍ではない場合にも同期を確保して設計上の自由度を増大させる。
【解決手段】コントローラ装置1の制御周期よりも駆動周期が短いドライブ装置30Aが、コントローラ装置1からの同期信号に合わせて駆動周期の起動タイミングを調整する周期タイミング補正手段33を備え、調整後の起動タイミングに従って駆動されるシステムにおいて、制御周期が駆動周期の整数倍でない場合に、制御周期に含まれる駆動周期の回数と端数時間とを求め、駆動周期の回数を変えずに1回以上の駆動周期を増加させた時の増加分の合計時間が前記端数時間に一致するように当該駆動周期を演算し、または、駆動周期の回数を増加させて1回以上の駆動周期を減少させた時の減少分の合計時間が元の駆動周期と端数時間との差に一致するように当該駆動周期を演算する周期演算手段32を備える。
(もっと読む)
負荷制御システムおよび負荷駆動システム
【課題】負荷駆動のためのアクチュエータ等の負荷駆動要素を複数制御する場合、その制御システム構築が容易となる負荷制御システムを提供する。
【解決手段】負荷駆動のための複数の負荷駆動要素のそれぞれを駆動制御するために、該複数の負荷駆動要素に対応して設けられる複数のドライバを含む負荷制御システムであって、複数のドライバのそれぞれは、自ドライバに直接関連付けられた負荷駆動要素を制御する制御部を有する。そして、複数のドライバのそれぞれは、負荷制御システムにおいて、自ドライバの制御部から該自ドライバを除く他のドライバの全部または一部の対象ドライバの制御部に対して、該対象ドライバに直接関連付けられた負荷駆動要素の駆動制御を行うための指令信号の送信が可能となる相互制御通信状態が形成されるように、互いに電気的に接続される。
(もっと読む)
モータ制御装置
【課題】同時に加速または減速する場合が高い頻度で発生する複数のモータを、共通電源の電源容量を増加させずに、サイクルタイムを減少させるような適切な加減速条件で動作させることができるモータ制御装置を得ること。
【解決手段】加減速パラメータ設定部3aは、電源供給部2から全モータに供給できる電力である供給可能電力の制限値または電源供給部2が全モータからの回生電力を処理できる電力である回生可能電力の制限値の範囲内で、動作指令8に含まれる指令移動量及び指令速度に基づき、2以上のモータのそれぞれに対する加減速パラメータ9を算出し、加減速処理部4aに設定する。
(もっと読む)
制御装置、制御方法、及びプログラム
【課題】モータの高効率なトルク制御を可能にして、エネルギーの無駄を小さく抑えることの可能な制御装置を提供する。
【解決手段】制御装置4は、第1条件判断器16と、第2条件判断器17と、第1加算器20と、第2加算器21とを有する。第1,第2条件判断器16,17は、それぞれ、速度指令が示す角速度を条件として、第1,第2モータ5,6の出力トルクを設定するための第1,第2補正乗数を求める。第1加算器20は、前記角速度に第1補正乗数を乗じた値と、第1のトルク値とを加算することで第1モータ5の出力トルクを求めて、出力トルクを示す第1モータ5の駆動信号を出力する。第2加算器21は、前記角速度に第2補正乗数を乗じた値と、第1のトルク値と正負が反対である第2のトルク値とを加算することで、第2モータ6の出力トルクを求めて、該出力トルクを示す第2モータ6の駆動信号を出力する。
(もっと読む)
押出プレス
【課題】押出プレスにおける油圧回路を構成する油圧機器や油圧ポンプを駆動する電動機、制御機器などの動的・熱的疲労度合の不均一を解消し、前記各構成機器の動的・熱的疲労度合及び余寿命を平準化するとともに、省エネルギー効果に優れた押出プレスを提供すること。
【解決手段】複数台の可変容量型の油圧ポンプが並列に接続されて押出プレスの油圧シリンダに作動油を供給し、予め設定した作動速度に基づき油圧ポンプの必要吐出量を求めて前記油圧ポンプを選択的に駆動制御する押出プレスにおいて、前記選択的に駆動制御される油圧ポンプの選択順序が、所定の成形サイクル数を完了したときに順送りするプログラムで制御される。
(もっと読む)
送風装置及び電子機器
【課題】冷却能力を高めるために複数のファンを用いて筐体を冷却する送風装置において、ファンから発せられるノイズを抑制することができる送風装置及び電子機器を提供する。
【解決手段】送風装置は、第1のファン11と、第2のファン12とを含む複数のファンを具備し、前記第1のファン11、及び第2のファン12は互いに異なる複数のフィン13a,14aを有し、少なくとも、前記一方のファンのフィン数は素数であり、前記第1のファン11と第2のファン12とは異なる回転数で駆動する。
(もっと読む)
プラント制御装置及び厚板圧延システム
【課題】対象プラントの生産性を低下させることなく、モータの過熱保護による操業停止を確実に防止できるプラント制御装置を提供する。
【解決手段】モータ2を駆動するドライブ装置3と、モータ2の速度基準を生成し、その生成した速度基準をドライブ装置3に送信するコントローラ4とを有するプラント制御装置1において、RMS値計算手段6及び加減速レート調整手段9を備える。RMS値計算手段6は、モータ2のトルク電流の実効値を計算する。加減速レート調整手段9は、RMS値計算手段6によって計算された実効値が所定の規定値を超えている場合に、上記速度基準の加減速レートを調整し、モータ2の過熱保護による操業停止を防止する。
(もっと読む)
同期制御装置と同期制御方法
【課題】
複数の駆動系を同期制御する汎用性のある手法を提供する。
【構成】
複数の駆動系を目標指令に従って動作させるため、第1の駆動系に対し第1の操作量を発生させ、第2の駆動系に対し第2の操作量を発生させる。第1の駆動系での目標指令からの誤差と、第2の駆動系での目標指令からの誤差との偏差に比例する同期制御用の操作量を発生させ、第1の操作量に同期制御用の操作量を加算し、第1の駆動系を制御する。また第2の操作量に同期制御用の操作量を加算し、第2の駆動系を制御する。
(もっと読む)
プロセス動作を保護するためのモータ保護システムの使用
【課題】プロセス動作を保護するためにモータ保護システムを使用する手法を提供する。
【解決手段】コントローラ220は、モータ保護測定値を使用して、リードモータ駆動式原動機120が故障しているかどうかを判定する。リードモータ駆動式原動機120が故障しているという判定に応答して、故障したリードモータ駆動式原動機120をトリップする前にラグモータ駆動式原動機130の動作をアクティブ化する。
(もっと読む)
モータ制御装置
【課題】応答性がよく、安定したタンデム制御によるモータ制御を行なうことができるモータ制御装置を提供する。
【解決手段】マスタ軸モータと少なくとも一つのスレーブ軸モータとを用いて、一つの軸を駆動するタンデム方式のモータ制御装置であって、モータ毎に位置制御部1と速度制御部2と電流制御部3とを具備し、さらにスレーブ軸にはマスタ軸のトルク指令値Tm*とスレーブ軸のトルク指令値とからスレーブ軸の調停トルク指令値Ts1*を算出するトルク調停部5と、スレーブ軸には上位制御装置からの指令の反転を検出する指令反転検出部23と、を備え、指令反転検出部23は、上位制御装置からの指令の反転を検出した場合、指令反転直前の調停トルク指令値Ts1*をスレーブ軸の速度制御部2の積分成分に設定することにより達成される。
(もっと読む)
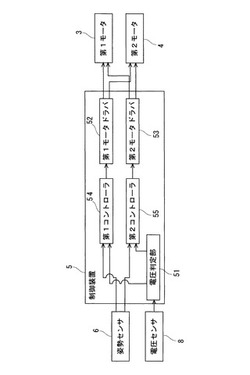
モータ駆動力伝達装置
【課題】長時間にわたる連続運転による電動モータの過度な発熱を抑制して連続して使用することができるモータ駆動力伝達装置を提供する。
【解決手段】モータ駆動力伝達装置1は、モータ駆動力をリヤディファレンシャル107に伝達する減速伝達機構2と、減速伝達機構2を介してリヤディファレンシャル107に連結され、第1のモータ駆動力aを発生させる第1の電動モータ3と、第1の電動モータ3及び減速伝達機構2に連結され、第2のモータ駆動力bを発生させる第2の電動モータ4と、リヤディファレンシャル107に対する駆動トルクが所定のトルク以上のトルクを要する場合に第1の電動モータ3及び第2の電動モータ4を共に駆動する制御信号を、また駆動トルクが所定のトルク未満のトルクを要する場合に第1の電動モータ3及び第2の電動モータ4を交互に駆動する制御信号をそれぞれ出力するECU5とを備えた。
(もっと読む)
省エネ運転支援システム
【課題】冷間タンデム圧延機や冷間シングル圧延機において、電機品を機器効率が高い負荷で運転させるようなパススケジュール設定を行うことにより、設備の省エネ運転を実現することができる省エネ運転支援システムを提供する。
【解決手段】設定計算装置7には、モータ3の効率、ドライブ装置4の効率、トランス5の効率に基づいて得られた圧延機2の最大効率が、記憶手段12に記憶されている。設定計算手段8によって圧延機2に対する負荷配分及びライン速度の設定計算が行われると、効率演算手段10は、設定計算手段8が計算した負荷配分で圧延を行った時の圧延機2の効率を演算する。そして、修正手段13は、記憶手段12に記憶された最大効率と効率演算手段10によって演算された効率との差が小さくなるように、設定計算手段8が計算したライン速度を修正する。
(もっと読む)
モータ制御システム、モータ制御装置およびモータ制御方法
【課題】多数のモータを円滑に協調して動作させることができるモータ制御システムを提供する。
【解決手段】モータ制御システム1は、モータ101を動作させるドライバ111を有するモータ制御装置100と、モータ201を動作させるドライバ211を有するモータ制御装置200と、モータ101を動作させる第1コマンド、および、モータ201を動作させる第2コマンドの両方を含むコマンド列の処理を要求するコマンド列処理要求部11を有する管理装置10とを備え、モータ制御装置100は、第1コマンドを実行するコマンド実行部121と、第2コマンドの実行をモータ制御装置200に要求するコマンド実行要求部122とを備える。
(もっと読む)
延伸装置の制御方法
【課題】延伸装置において、手動介入後の自動運転復帰で、各セクションの速度到達時刻がバラツキ、製品の延伸率にバラツキがでるため、製品むらが大きくなっていた。
【解決手段】延伸装置において、複数の延伸ロールは各々が増減速機を介して電動機によって駆動され、前記各電動機は駆動電流を検出する電流検出器と回転速度を検出する回転速度検出器を備え、前記電流検出器および前記回転速度検出器の検出信号はそれぞれ前記各電動機の駆動制御を行う駆動制御器に入力され、前記駆動制御器には延伸制御器から各延伸ロールの回転速度制御信号が入力されており、前記駆動制御器は前記回転速度制御信号に基づいて電動機の回転制御を行い、手動介入後の自動運転復帰時には、各延伸ロールの回転速度および加減速度は再計算され、設定速度到達時間の最も遅いものの設定速度到達時刻に、各延伸ロールが同時に設定速度に達するように設定されていることを特徴とする。
(もっと読む)
プロセスコントロール装置
【課題】冷却フアンの寿命を均等に延長させることで定期交換周期を延ばし、メンテナンス性が向上できるプロセスコントロール装置を実現する。
【解決手段】収納された電気部品を冷却する常時使用用の冷却ファンと、予備用の冷却ファンとを有するキャビネットを具備するプロセスコントロール装置において、前記常時使用用の冷却ファンと前記予備用の冷却ファンとの全ての冷却ファンの残り寿命時間がほぼ均等になるように前記全ての冷却ファンを所定時間ごとに順次切り替えて使用して前記予備用の冷却ファンの数だけ前記全ての前記冷却ファンを順次休止させるようにされた冷却ファン稼働停止制御装置を具備したことを特徴とするプロセスコントロール装置である。
(もっと読む)
射出成形機
【課題】求められる制御精度がそれぞれ異なる複数のサーボモータをより効率的に集中制御する多軸サーボドライバを搭載する射出成形機を提供すること。
【解決手段】四つのサーボモータM1〜M4を集中制御する多軸サーボドライバEQを搭載する射出成形機において、その多軸サーボドライバEQは、それら四つのサーボモータM1〜M4のそれぞれに関する演算のために用いられる一のCPU資源を備える。また、その多軸サーボドライバEQは、それら四つのサーボモータM1〜M4の制御周期を個別に設定する制御周期設定部C13を備え、成形サイクル中にそれら四つのサーボモータM1〜M4のうちの少なくとも一つの制御周期が変化するように、それら四つのサーボモータのそれぞれの制御周期を設定することができる。
(もっと読む)
1 - 20 / 202
[ Back to top ]