
Fターム[5J062CC07]の内容
Fターム[5J062CC07]に分類される特許
181 - 200 / 2,510
測位装置
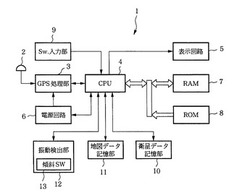
【課題】電池寿命の長期化、及び装置の小型化が可能となる測位装置を提供する。
【解決手段】GPS衛星から送られてくる位置情報に基づき、GPS処理部3により現在位置を計測する。傾斜スイッチ13の検出信号に基づき装置本体の振動の有無を検知するとともに、振動のない状態が一定時間以上継続したときには、停止状態にあると判断して、GPS処理部3による現在位置の計測動作を自動的に停止する。また、計測された現在位置が一定時間前の計測結果と同一であったとき、GPS処理部3による現在位置の計測動作を自動的に停止する。無意味な測位動作を停止することにより消費電力を削減する。また、サーモセンサーや加速度センサーにより装置本体の所定時間内の温度変化や姿勢変化等を検出する。それにより使用者に装着されていない状態を検知して現在位置の計測動作を自動的に停止する。
(もっと読む)
衛星電波受信装置

【課題】 サイズを大型化せずに測位衛星からの信号検出時間を短縮することの出来る衛星電波受信装置を提供する。
【解決手段】 衛星電波受信装置において、受信手段と、衛星信号を検出するための演算を2以上の所定数の受信周波数に対して並列的に実行可能な検出演算手段(151、154)と、第1の周波数間隔で順番に設定した一の受信周波数の信号を検出演算手段に第1のビット数のデジタルデータとして取得させ、演算結果に基づいて衛星信号を検出する捕捉手段(156)と、衛星信号が検出された場合に、第1の周波数間隔より狭い第2の周波数間隔で順番に所定数個ずつ設定した受信周波数の信号を検出演算手段に第1のビット数より小さい第2のビット数のデジタルデータとして各々取得させ、並列的に行われる演算結果に基づいて衛星信号の受信周波数を特定する特定手段(156)と、を備える。
(もっと読む)
移動体測位方法、移動体測位装置
【課題】高精度な移動体測位方法を実現する。
【解決手段】移動体測位方法は、慣性センサーデータをバッファリングすることと、バッファリングされた前記慣性センサーデータを用いてINS測位演算を行うことと、現在時刻に対するGPS測位の遅延時間を計算することと、GPSデータの出力時刻とGPS測位結果とをバッファリングすることと、バッファリングされた前記GPS測位結果とINS測位結果との時刻同期をとることと、バッファリングされた前記慣性センサーデータと、前記慣性INS測位結果と、バッファリングされた前記GPS測位結果と、をカップリングし、位置・速度・姿勢の誤差を推定することと、前記位置・速度・姿勢の誤差を前記INS測位結果にフィードバックし、補正する。GPSデータと慣性センサーデータの時刻同期をとり、正確なINS測位結果の誤差補正を行うことによって、高精度な移動体測位を行うことができる。
(もっと読む)
車両位置検出装置、車両位置検出方法
【課題】本発明では、当該車両位置検出装置のシステム構成を複雑にすることなく、自車両が駐車場等の開けた場所に存在するか否かを判定する車両位置検出装置、及び当該車両位置検出装置による車両位置検出方法を提供することを目的とする。
【解決手段】本発明に係る車両位置検出装置では、複数のGPS衛星から送信される測位信号に基づいて車両位置を検出する車両位置検出装置であって、前記測位信号を検出する測位信号検出手段と、前記測位信号検出手段により検出される前記測位信号に関するマルチパス信号の検出状況に基づいて、前記車両が開けた場所に存在するか否かを判定するオフルート判定手段と、を有することを特徴とする。
(もっと読む)
GPS信号による移動体位置決め方法および移動体位置決定装置ならびに移動体位置決定プログラム
【課題】正確な地図データがない場合であってもGPS信号による移動体の位置決めを正確に行うことができる新規なGPS信号による移動体位置決め方法および移動体位置決定装置ならびに移動体位置決定プログラムの提供。
【解決手段】人工衛星から発信されるGPS信号を連続的に受信し、受信したGPS信号に基づいて所定時間ごとに前記移動体の位置を算定し、算定された所定時間ごとの移動体の算定位置を記憶し、記憶された移動体の算定位置同士の広がり具合に基づいて前記移動体の停止または移動を判断し、移動体が移動したと判断したときに前記移動体の位置を決定する。これによって、正確な地図データや専用のセンサがなくともGPS信号による移動体の位置決めを正確に行うことができる。
(もっと読む)
位置情報送信機
【課題】位置情報送信機が設置された後に生ずる出力信号の偏差を補正することを可能とする位置情報送信機を提供することを目的とする。
【解決手段】人工衛星から送信される測位のための衛星測位信号との互換性を有する測位信号を送信する位置情報送信機であって、水晶に電圧をかけることにより、基準周波数の信号を生成する基準周波数発振部と、基準周波数の信号に電圧をかけることにより、基準周波数よりも大きい第1の周波数の信号となるように制御する第1の周波数制御部と、第1の周波数の信号を用いて、位置情報送信機が設置された位置を示す位置データを変調することにより、測位信号を生成する測位信号生成部と、基準時間を記憶する記憶部と、基準時間からの経過時間を計測する時間計測部と、を備え、経過時間が設定された第1の経過時間となった場合に、水晶にかける電圧を変化させることを特徴とする位置情報送信機である。
(もっと読む)
測位システム、測位方法
【課題】慣性センサーデータとGPS測位データとを融合した高精度な測位方法を実現する。
【解決手段】測位方法は、慣性センサーデータとGPS測位データとを融合して移動体を測位する測位方法であって、慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、GPS測位データに基づき、拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、推定された位置誤差・速度誤差・方位角誤差・ジャイロバイアス誤差・加速度バイアス誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、を有する。
(もっと読む)
電子機器
【課題】ホットスタートの実行可能期間を延長する。
【解決手段】電子機器(1及び1a)の夫々は、GPS衛星信号に基づく拡張エフェメリスを、その寿命データと共に保持している。電子機器(1)は、他の電子機器(1a)に対して自身が保持している拡張エフェメリスEE及び寿命データLDを送信する。他の電子機器(1a)は、自身が保持している寿命データLDaと受信した寿命データLDとを比較し、自身が保持している拡張エフェメリスEEaの寿命の終期が拡張エフェメリスEEの寿命の終期によりも遅い場合、電子機器(1)に対して、拡張エフェメリスEEa及び寿命データLDaを返信する。この返信を受けた電子機器(1)は、自身が保持する拡張エフェメリス及び寿命データを受信した拡張エフェメリスEEa及び寿命データLDaにて更新する(置き換える)。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 予め決められた地点へ移動したり、予め決められた地点を通過したりする場合に、この地点の正確な位置データを測位結果に反映できる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】 測位衛星を利用した間欠的な絶対位置の測定とモーションセンサによる連続的な相対変位の測定とに基づいて現在の推定位置を算出する位置算出手段(S2〜S6)と、地点登録手段と、位置算出手段により算出された推定位置が登録地点から所定範囲内にあるか否かを判定する位置範囲判定手段(S14)と、登録地点に到達した可能性のある所定状態の判別を行う到達状態判別手段(S15)と、位置範囲判定手段により前記所定範囲内と判定され、且つ、到達状態判別手段により前記所定状態であると判別された場合に、登録地点を現在の絶対位置に決定する現在位置決定手段(S16)とを備えている。
(もっと読む)
無線端末装置及び測位方法
【課題】GPSによる測位処理用の特別な補助情報を基地局から取得しない場合に、TTFF性能を向上できる無線端末装置及び測位方法を提供すること。
【解決手段】携帯電話機1は、Almanacデータ及び国毎に複数設けられた基準地点の座標を記憶する記憶部70と、位置登録した基地局から国コードを取得する国情報取得部31と、国コードに基づいて基地局が在圏する国における基準地点の座標を取得する基準地点取得部32と、Almanacデータ、基準地点の位置情報及び現在時刻に基づいて、基準地点それぞれにおける可視衛星を算出する可視衛星算出部33と、算出された可視衛星のうち、より多くの基準地点に共通する可視衛星ほど優先度を高め、優先して捕捉を試みる測位処理部34と、を備える。
(もっと読む)
測位装置及び電子機器
【課題】測位装置が測位に要する時間を外部に通知することにより、測位終了を待っている利用者の心理的な負荷を軽減する衛星測位システムの測位装置を提供する。
【解決手段】測位装置は、衛星から受信した測位信号に基づいて測位を行う測位装置であって、測位信号をサーチする範囲を計算する第一計算手段10と、測位信号をサーチするステップを計算する第二計算手段11と、測位信号を積算する時間を計算する第三計算手段12と、第一計算手段10と第二計算手段11と第三計算手段12と、を使って測位計算が完了するまでの予測所要時間を計算する第四計算手段13と、第四計算手段13で計算される予測所要時間を初期値として時間管理を開始するタイマー手段14と、タイマー手段14で管理される予測所要時間を通知する通知手段15と、を備える。
(もっと読む)
周波数追尾装置
【課題】異なるコヒーレント加算時間で算出した積算パワーの平方根の差分によって周波数ずれ量を算出することで、高精度な周波数ずれ量を算出する。
【解決手段】 所望の衛星信号yを加算時間MAでコヒーレント加算し、NA回ノンコヒーレント加算をして、積算パワー|yA|2を算出する積算器17と、衛星信号yを加算時間MAと異なる加算時間MBでコヒーレント加算し、NB回ノンコヒーレント加算をして、積算パワー|yB|2を算出する積算器18と、積算器17によって算出される積算パワーの平方根|yA|と、積算器18によって算出される積算パワーの平方根|yB|との差分から、周波数ずれ量Δf2を算出する周波数ずれ演算器20と、を備え、周波数ずれ演算器20で算出された周波数ずれ量Δf2に基づいて、所望の衛星信号yを追尾する。
(もっと読む)
油圧ショベルの位置誘導システム及び位置誘導システムの制御方法
【課題】本発明の課題は、オペレータへの作業負担を軽減することができる油圧ショベルの位置誘導システム及び位置誘導システムの制御方法を提供することにある。
【解決手段】油圧ショベルの位置誘導システムにおいて、判定部は、油圧ショベルが走行状態であるのか否かを判定する。判定部は、油圧ショベルが走行停止状態から走行状態に変化したと判定したときには、表示部に表示させる案内画面を、作業モードの案内画面(53,54)から、走行モードの案内画面(51,52)に切り換える。作業モードの案内画面(53,54)は、目標作業対象と作業機との位置関係を示す。走行モードの案内画面(51,52)は、作業エリアでの油圧ショベルの現在位置を示す。
(もっと読む)
測位支援装置
【課題】本発明は、位置が既知である複数の送信機の距離を求め、または測位に供する測位支援装置に関し、異なる測位系に共用されるハードウェアの伝搬遅延時間の格差および変化に起因する測位の誤差を確度高く安定に抑圧できることを目的とする。
【解決手段】第一の測位系に属し、かつ位置が既知である複数pの送信機から個別に到来した無線信号を処理することにより、前記複数pの送信機の距離を求める測位支援装置であって、前記第一の測位系と同じ航法が適用された第二の測位系において位置が既知である複数p′の送信機から個別に到来した無線信号に基づいて同時に行われる測位に供され、かつ前記測位の過程で時計が与える時刻T′と、前記処理の過程で前記時計が与える時刻Tの前記時刻T′に対する偏差が圧縮された時刻との何れかを前記処理に適用する手段を備える。
(もっと読む)
入力信号と基準周波数との周波数差を得る方法並びにこの方法を実行する弁別装置、GPS受信機及びコンピュータプログラム
【課題】動作範囲内で線形応答を示す、周波数弁別器を提供する。
【解決手段】実際の数の標本点の二倍である一群の点上での離散フーリエ変換に対する様な回転因子に通常の回転因子が置き換えられている離散フーリエ変換の変形に基づく周波数弁別器。その様に変更された離散フーリエ変換は、計算負担を殆ど追加することなく半ビン周波数弁別を可能にする。ゼロ周波数に関して半ビンだけ偏移された二つの離散フーリエ変換は、弁別の線形応答と雑音に対する良好な耐性とを与える。この弁別器は、GPS受信機中で信号を追尾するためのFLL中で特に有用である。
(もっと読む)
情報処理装置および情報処理方法
【課題】 高架道路および高架下道路のいずれかを車両が走行している際に、走行している道路が高架道路か高架下道路のいずれであるかを精度よく判断することができる情報処理装置を提供する。
【解決手段】 ナビゲーション1は、GPS受信機2から送信されるGPS情報に基づいて、自車両の位置を取得する。また、車車間通信装置4を介して、他車両位置情報および他車両位置情報を取得した際のGPS受信強度信号を取得する。さらに、取得した他車両位置情報およびGPS受信強度信号に基づいて、他車両が高架道路を走行しているか高架下道路を走行しているかの他車両三次元位置を取得する。こうして取得した自車両位置および他社量産時原位置に基づいて、自車両と他車両との衝突可能性を判断する。
(もっと読む)
列車走行実績データ作成システム
【課題】計算処理負荷の小さな算出方法で鉄道網における各列車の走行実績データを作成する。
【解決手段】データベース部は、路線内の所定の基準点における緯度・経度情報、基準駅から基準点までの距離程および基準点から所望の誤差許容距離内で定義された判定エリアの緯度・経度情報を関連付けた判定エリアデータを記憶する。GPS測位データ補正部は、GPS測位データ受信部で受信された測位データの緯度・経度が判定エリアデータに含まれる場合、該当する判定エリアが対応する路線の距離程に列車が存在するものと判定して所定の補正演算を行い、現在時刻における列車の距離程および緯度・経度を含む補正測位データを作成する。走行実績データ作成部は、GPS測位データ補正部で作成された補正測位データを取得し、測位時刻と距離程の関係を示す走行実績データを列車毎に作成する。
(もっと読む)
衛星航法デバイス
【課題】複雑化及びコスト上昇を生じずに柔軟なRF受信機を含む衛星航法デバイスを提供する。
【解決手段】
衛星航法デバイスは、複数の衛星からの少なくとも1つのスペクトル拡散信号を含む信号を受信する受信機を備え、該受信機は、複数チャネルを有し、各チャネルが、信号の少なくとも一部を中間周波数にダウン・コンバートすることによって、各衛星からのスペクトル拡散信号においてそれぞれの周波数帯域を受信するサブチャネル回路436を含み、該サブチャネル回路は、中央周波数が前記中間周波数に実質的に等しく、帯域幅が前記第1衛星の帯域幅よりも大きいバンドパス・フィルタ422を備えている。
(もっと読む)
衛星位置決めシステムの時間測定のための方法および装置
【課題】衛星位置決めシステム(SPS)に使用される衛星データメッセージに関連した時間を測定する。
【解決手段】衛星データメッセージの少なくとも一部の第1のレコードはエンティティ、一般には基地局において受信される。第1のレコードは、衛星データメッセージの第2のレコードと比較される。第1のレコードと第2のレコードは、少なくとも部分的に時間が重畳される。この比較から時間が決定される。この時間は、第1のレコード(または第1のレコードが得られる源)が遠隔のエンティティ、一般にはモバイルSPS受信器において受信されたときを示す。信号内のデータとして送信される衛星データメッセージを読むことなしにSPS信号を用いて日時を測定する。これらの方法および装置は、受信した信号レベルが非常に弱く衛星データメッセージを読むことが出来ない状況に適している。
(もっと読む)
自車位置決定装置
【課題】マルチパスの影響を考慮して、信頼性が低い衛星航法による測位結果を採用することを原因とした自車位置のミスマッチングを簡便かつ有効に抑制することができる「自車位置決定装置」を提供すること。
【解決手段】複数の衛星航法手段2のそれぞれの測位結果を継続的に監視しつつ、これらの所定のずれ量が閾値を超えたか否かを所定の判定時機ごとに判定する判定手段2と、これによって肯定的な判定結果が得られた場合には、複数の衛星航法手段2の測位結果を用いずに、自律航法手段2の測位結果のみを用いて自車位置を決定し、判定手段2によって否定的な判定結果が得られた場合には、複数の衛星航法手段2の測位結果を用いて自車位置を決定すること。
(もっと読む)
181 - 200 / 2,510
[ Back to top ]