
Fターム[5J062CC07]の内容
Fターム[5J062CC07]に分類される特許
141 - 160 / 2,510
位置算出方法及び位置算出装置
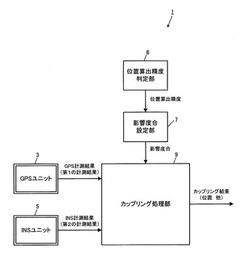
【課題】 移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】 GPSユニット3とINSユニット5とを備えた位置算出装置1において、位置算出精度判定部6は、位置算出精度を判定する。影響度合設定部7は、位置算出精度判定部6により判定された位置算出精度に基づいて、GPS計測結果のINS計測結果に対する影響度合を設定する。カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
航空機のための交互通信

【課題】遠隔操作を行なうための双方向無線通信が不能となった場合でも、衛星受信機を介してコマンド及びコントロールメッセージを処理する航空機を提供する。
【解決手段】航空機は、メッセージ通信能を有する衛星受信機を備えている。この受信機は、交互通信が必要とされるときにコマンド及びコントロール(C2)メッセージを処理する。航空機は、更に、衛星受信機が受信したC2メッセージに含まれる命令に従って一連の動作を行うアビオニクスを備えている。
(もっと読む)
位置算出方法及び位置算出装置
【課題】移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】GPSユニット3とINSユニット5とを備えた位置算出装置1において、影響度合設定部7は、位置算出を開始してから所与の条件が成立するまでの間は、GPS計測結果のINS計測結果に対する影響度合を第1の度合に設定し、所与の条件が成立した後は、影響度合を第1の度合よりも低い第2の度合に設定する。そして、カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
時刻修正装置、時刻修正装置付き計時装置及び時刻修正方法
【課題】位置情報衛星から送信される時刻情報の正誤を確実に且つ迅速に判断することができる時刻修正装置等を提供すること。
【解決手段】位置情報衛星15から区画毎に区分されて送信される衛星信号を受信する衛星信号受信部20と、衛星信号から時刻情報を取得する時刻情報取得部20と、時刻情報の属する区画の区画識別情報を取得する区画識別情報取得部37と、時刻情報に基づいて区画識別情報に対応する対応区画識別情報を演算する対応識別情報演算部38と、区画識別情報と対応区画識別情報に基づいて区画識別情報の正誤を判断する区画識別情報判断部39と、を有する時刻修正装置10。
(もっと読む)
衛星位置システムに関する支援データを使用するための方法および装置
【課題】移動SPS受信器との片方向または双方向の通信を介して移動SPS受信器の視野にある衛星測位システム(SPS)衛星の順番付けされたセットを得るための方法および装置を提供する。
【解決手段】移動SPS受信器はセルラ送信サイトからSPS衛星の順番付けされたセットを受信する。順番づけされたセットの衛星は、移動SPS受信器がSPS衛星の順番づけされたセットの順番に従ってSPS衛星を探索できるように、一時に移動SPS受信器の視野にある衛星である。順番付けされたセットの順番は種々の方法により得ることができ、その1つは精密度の幾何学的希釈を最小にすることにより得ることができる。健康データは送信に含めることが出来る。
(もっと読む)
端末位置判定装置および端末位置判定システム
【課題】車車間通信や歩車間通信によって端末間でやり取りされるGPS位置情報のような衛星を用いた位置情報の信頼度を判定する構成を提供する。
【解決手段】車車間通信部32が受信した他の端末のGPS位置情報と取得部33が取得した他の端末の移動速度および走行方向に基づき、推定部34によりGPS位置情報に基づく他の端末の存在位置を基準にして、つぎの時刻の他の端末の存在位置を推定し、判定部35により、推定部34が推定した他の端末のつぎの時刻の推定位置と、車車間通信部32がつぎの時刻に受信したGPS位置情報に基づく他の端末の存在位置との一致度に基づいて、他の端末から受信するGPS位置情報の信頼度を判定する。
(もっと読む)
位置情報補正システム
【課題】GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供する。
【解決手段】携帯電話機1の位置情報ログ取得部11は、GPS受信機を用いて位置情報をログとして取得する。送信部12は、位置情報ログ取得部11から取得した位置情報ログを、ネットワーク5を介してサーバー4に送信する。サーバー4の受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた位置情報ログを受信し、記憶部42に記憶させる。位置情報精度判定部44は、記憶部42に記憶されている位置情報ログを読み出し、位置情報の精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44からの位置情報精度の判定結果から、位置情報ログの取得時刻の前後2つの位置情報ログに基づいて、位置情報ログを補正する。
(もっと読む)
測位システム及び通信端末
【課題】安定して確実に通信端末の現在位置を取得可能な測位システムを提供する。
【解決手段】位置を示す位置情報を含んだ位置情報信号を人工衛星2から送信される衛星
測位信号と互換性を有する信号として送信する位置情報送信機100と、衛星測位信号を
受信すると人工衛星2の位置を求めることにより自身の現在位置を求め、位置情報信号を
受信すると位置情報に基づき自身の現在位置を求める通信端末200とを含む測位システ
ム1において、位置情報送信機100から、通信端末200の各相関器を衛星測位信号又
は位置情報信号のいずれを受信するように設定するかを決定する境界フラグ311を含む
位置情報信号を送信し、通信端末200が、境界フラグ311に基づき相関器が衛星測位
信号又は位置情報信号のいずれを受信するのかを設定するようにする。
(もっと読む)
エフェメリス拡張システムとGNSSでの使用方法
【課題】全地球的航法衛星システム(GNSS)受信機の性能を改善するためのシステム、方法及び装置を提示する。特に、受信機がGNSS衛星から放送されているエフェメリスデータを直接受信する能力が劣化している場合において、衛星の位置又は受信機の位置を計算する能力を改善することを提示する。
【解決手段】放送されているアルマナックなどの概ね長期の衛星位置モデルに対して、補正項を適用するものである。
(もっと読む)
位置補正装置および車車間通信システム
【課題】自車両(第1の車両)の周辺の障害物(第2の車両や歩行者)が衛星を用いて得た位置情報を、自車両(第1の車両)が前記障害物から受信する際に、衛星の測位情報に基づく位置ずれを考慮して、自車両(第1の車両)が受信した前記障害物の位置情報の位置の精度を向上する。
【解決手段】位置補正装置3を自車両(第1の車両)が備えることにより、自車両において、周辺の障害物が衛星を用いて得た当該障害物の位置情報を車車間受信機10が受信し、自車両が衛星を用いて得た自車両の位置情報をGPS受信部4が取得する。このとき、いずれの位置情報にも、衛星の測位情報に基づく位置ずれ(誤差)が含まれる。そして、算出部9により、GPS受信部4が取得する位置情報の位置ずれ量を算出し、補正部11により、算出部9が算出した位置ずれ量に基づいて車車間受信機10が受信する位置情報の位置を補正する。
(もっと読む)
海面における中周期波の計測方法および計測装置
【課題】GPS単独測位方式を用いた場合でも中周期波を精度良く計測し得る海面における中周期波の計測方法を提供する。
【解決手段】海面に係留された浮体Fに設けられたGPS受信機31にて観測される搬送波位相を用いた精密変動観測法(PVD法)により、浮体の変動量を検出して海面の中周期波を計測する際に、GPS受信機の距離計測部で求められた搬送波位相距離に含まれているGPS衛星の時計誤差、電離層遅延量および対流圏遅延量を精密に算出し、そしてこれらの誤差成分を上記求められた搬送波位相距離から除去した後、バンドパスフィルタをかけることにより、上記搬送波位相距離から30秒〜2分までの中周期変動成分を抽出する方法である。
(もっと読む)
航法計算システム
【課題】外部からの助けなしに、独自に、GPS観測値の異常を異常発生後速やかに検出することができる。
【解決手段】検定1処理部8にて、IMU6の出力に基づき計算される姿勢角と、GPSの搬送波観測値に基づいてGPSコンパス計算部5で計算される姿勢角を比較して、ほぼ一致する場合には、GPSの搬送波位相観測値が正常であると判断し、さらに、検定2処理部9にて、検定1処理部8で正常と判断された搬送波位相観測値の変化量と、擬似距離観測値の変化量を比較して、ほぼ一致する場合に、擬似距離観測値も正常であると判定する。これらの判定で正常であると判定されたGPS観測値だけを航法計算装置7で使うようにすることで、異常なGPS観測値が航法計算に用いられることを防止することができる。
(もっと読む)
ナビゲーション端末
【課題】特別なインフラ設備を必要とすることなく、位置が確定されている1台のナビゲーション端末とのやり取りのみで位置を確定することができるナビゲーション端末を提供する。
【解決手段】通信可能な他端末から送信された、該他端末の位置情報を含む無線波を受信する無線波受信部12と、無線波受信部12で受信された無線波に含まれる他端末の位置情報、及び他端末からの距離を示す距離情報に基づいて自端末の位置を算出する位置算出部15とを備える。これにより、特別なインフラ設備を必要とすることなく、ナビゲーション端末間のやり取りのみで位置を確定することが可能となる。
(もっと読む)
測位装置、測位システム、測位方法、プログラム
【課題】周囲環境の影響によるセンサの信頼度低下に対して高い精度で測位が行えるようにする。
【解決手段】それぞれ検知対象が異なる複数のセンサから出力されるセンサ値の信頼度を環境データベースを利用して求める。また、信頼度が付加されたセンサ値を利用して複数の測位手法により並行して測位を行って複数の測位結果を得る。また、これらの測位結果の信頼度を環境データベースを利用して求める。そして、これらの信頼度が付加された測位結果を統合して1つの位置情報を出力するように構成する。
(もっと読む)
異常値判定装置、測位装置、及びプログラム
【課題】GPS情報とINS情報とを統合して測位を行う場合に、GPS情報の異常値を精度良く判定する。
【解決手段】区間幅決定部22で、速度情報の累積誤差と擬似距離誤差との差が所定範囲の値となるように、INS情報とGPS情報とを統合する区間幅を決定する。区間幅内の各時刻で観測された速度情報及び擬似距離を、N点観測値記憶部24に記憶する。初期値設定部26で、N点観測値記憶部24に記憶されたINS情報に基づいて方位角及び移動ベクトルの初期値を設定し、最適解推定部28で、観測値(ρ,Δx)から推定初期値からの変位で表される状態(dx,Cb,dθ)を推定する方程式を立て、最小二乗法により推定初期値を更新しながら収束するまで繰り返して状態を推定し、収束したときの状態及び推定初期値から測位解を推定する。異常値判定部30は、測位解と擬似距離から得られる位置との残差γが閾値を超える擬似距離を異常値と判定する。
(もっと読む)
相対位置推定装置及びプログラム
【課題】少ないデータ通信量で、他の装置との相対位置を精度良く推定することができるようにする。
【解決手段】位置・速度ベクトル算出部24によって自車両の位置及び速度ベクトルを算出する。無線通信部18によって、相手車両の位置及び速度ベクトルを受信する。位置差分相対位置算出部26によって、受信された相手車両の位置から、各時刻について相手車両の相対位置を算出する。軌跡算出部32によって、自車両の速度ベクトルを積算して軌跡を算出する。相手軌跡算出部34によって、受信された速度ベクトルを積算して相手車両の軌跡を算出する。軌跡利用相対位置推定部36によって、自車両の軌跡と、相手車両の軌跡と、各時刻について算出された相対位置とに基づいて、相手車両の軌跡の最適値を推定し、軌跡上の特定点における相対位置を推定する。
(もっと読む)
時刻修正機能付きGPS時計
【課題】消費電力を抑えつつGPS信号から時刻情報を確実に取得することができる時刻修正機能付きGPS時計を提供すること。
【解決手段】GPS信号の受信環境が悪く、受信レベルが所定の閾値以上ない場合には、1時間ごと(第1所定時間)に受信動作を行ない、その際、捕捉動作のみを行なってそれ以外の受信システムは休止状態とする。
また、受信状況がそれほど悪くはないが、正しいGPS時刻情報が得られるほど良くはない環境下では、4時間ごと(第2所定時間)に受信動作を行ない、捕捉動作に加えGPS時刻取得と内部時計との比較処理まで実施する。
このようにすることで、受信環境が悪化しているときには、捕捉動作による相関値のチェックのみを行ない、かつ受信動作を頻繁に繰り返すことで、回復の機会を逃さないように監視し、受信環境が良くなってきたら、GPS時刻情報まで取得するようにして、時刻修正の機会を増やすことが可能となる。
(もっと読む)
位置情報提供装置および位置情報提供方法
【課題】 大掛かりな設備や、携帯端末等の装置の設計変更を必要とせずに、場所によらずに携帯端末等の装置が正確な位置情報を取得できるようにする。
【解決手段】 位置情報提供装置1は、複数の信号受信部2と、位置確定部3と、無線通信部4とを有する。各信号受信部2は、それぞれ、位置情報を含む互いに異なる種類の信号を受信する機能を備えている。位置確定部3は、信号受信部2で受信された各信号に含まれている位置情報と、それら各信号に対して与えられる信頼度とに基づいた演算処理により、自装置の所在位置を確定する機能を備えている。無線通信部4は、位置確定部3により確定した前記所在位置の情報を伝達する信号を、予め定められた信号形式でもって外部に向け無線送信する機能を備えている。
(もっと読む)
油圧ショベルの較正装置及び油圧ショベルの較正方法
【課題】作業点の位置検出の精度を向上させると共に、較正作業時間を短縮することができる油圧ショベルの較正装置及び較正方法を提供する。
【解決手段】油圧ショベルの較正装置は、入力部63と、第1較正演算部65cと、第2較正演算部65dと、を備える。入力部63は、作業点位置情報とアンテナ位置情報とが入力される部分である。作業点位置情報は、外部計測装置で計測された作業点の複数の位置での座標を示す。アンテナ位置情報は、外部計測装置で計測されたアンテナの位置の座標を示す。第1較正演算部65cは、入力部63に入力された作業点位置情報に基づいて、数値解析により作業機パラメータの較正値を演算する。第2較正演算部65dは、入力部63に入力されたアンテナ位置情報に基づいてアンテナパラメータを較正する。
(もっと読む)
運転支援装置
【課題】停車状態でのGPSモジュールにより検出される自車両の位置の精度を判定することができるようにする。
【解決手段】GPSモジュールと、他車両情報取得手段と、衝突可能性判定手段と、情報提供手段とを備える運転支援装置において、自車両から出力される車速パルスに基づいて走行速度を検出する車速検出手段と、車速検出手段により検出された走行速度が0である時に、GPSモジュールにより検出された自車両の位置に基づいて、GPSモジュールの検出結果の有効性を判定するGPS有効性判定手段とを備える。
(もっと読む)
141 - 160 / 2,510
[ Back to top ]