
Fターム[5J062DD21]の内容
Fターム[5J062DD21]の下位に属するFターム
Fターム[5J062DD21]に分類される特許
301 - 320 / 405
位置特定装置および位置特定端末および位置特定システムおよび位置特定プログラムおよび位置特定方法

【課題】 2つ以下のアンテナで端末の位置を特定することを目的とする。また、2つ以下のアンテナで端末の位置を特定しようとする場合、端末内部のバッファの読み出しタイミングなどによる遅延時間によって生じる誤差をなくすことを目的とする。
【解決手段】 位置記憶部110は、2つの受信部130が存在する位置を記憶する。受信差算出部150は、発信部120が送信した信号に対して端末が送信する返信信号を各受信部130が受信した時刻の差を算出する。方向特定部160は、受信部130が受信した返信信号から端末200の存在する方向を特定する。位置特定部170は、上記の情報から端末200の位置を特定する。
(もっと読む)
移動体測位システム

【課題】高い測位精度と高い測位率を備えた移動体測位システムを得る。
【解決手段】GPS衛星からのC/Aコードを用いて測位する測位方式により周期的にコード受信機測位情報を出力する1周波コード受信機と、前記GPS衛星からの搬送波位相を観測する測位方式により前記コード受信機測位情報と同期してキャリア受信機測位情報を出力する2周波キャリア受信機と、前記コード受信機測位情報と前記キャリア受信機測位情報を入力し測位データを出力するデータ補完処理装置とを備え、前記データ補完処理装置は、ある測位時刻において前記キャリア受信機測位情報に基いて測位データを測位することが不能であるときに、測位データを測位することができた直近の測位時刻における前記キャリア受信機測位情報に基く測位データと前記コード受信機測位情報とを用いて、測位データを補完するようにした。
(もっと読む)
位置管理方法及び位置管理システム
【課題】 移動先が第1の通信回線の圏外である場合であっても、対象物の位置情報等を管理装置に通知する。
【解決手段】 一実施形態によれば、物品1−1と共に移動するアタッチメント1−2は、物品1−1の移動開始後の移動終了を検出したならば、移動先位置、現在時刻を検出し、通信ゲートウェイ1−5と必要な他のアタッチメントを経由するアドホックマルチホッププロトコルを利用した通信回線を介して管理装置1−6に移動先位置、現在時刻及びアタッチメントの識別情報の登録を依頼する。これに失敗した場合には、アタッチメント1−2は、位置情報暫定保管装置1−4に移動先位置、現在時刻及びアタッチメントの識別情報の登録を依頼する。これに応じて、位置情報暫定保管装置1―4は、これらを一時保管し、第2の通信回線1−7を介して、これらを管理装置1−6に登録する。
(もっと読む)
測位システム及び測位方法及び移動体端末及び地図サーバ装置
【課題】 例えば、移動体端末がより短時間で測位衛星を捕捉することを目的とする。また、例えば、移動体端末が閉空間から開放空間に移動した直後の測位精度を向上させることを目的とする。
【解決手段】 受信装置700は、GPS衛星500から航法データを受信し、航法データの軌道情報を送信する。無線LANアクセスポイント600は、受信装置700が送信した軌道情報を携帯電話機300に伝送する。携帯電話機300は、無線LANアクセスポイント600から軌道情報を受信する。携帯電話機300は、閉空間から開放空間に移動すると、GPS衛星500から航法データを受信する。携帯電話機300は、受信装置700から受信した軌道情報とGPS衛星500から受信した航法データとを用いて測位を行う。
(もっと読む)
測位システムおよび測位方法
【課題】 読み取り装置の数を増加させることなく移動体の測位精度を上げる。
【解決手段】 測位システム100は、複数の固定アクティブタグ30と、タグリーダー40と、データ処理機70とを備えている。複数の固定アクティブタグ30は、それぞれ電磁波を発信する。タグリーダー40は、複数の固定アクティブタグ30が発信する電磁波をそれぞれ受信する。データ処理機70は、固定アクティブタグ30毎の変動データD1と固定アクティブタグ30毎の基準位置データD2とを固定アクティブタグ30毎に対応させて処理を行うことで、複数の固定アクティブタグ30それぞれとタグリーダー40との間の各領域を対象とした位置の測定(測位)を行う。
(もっと読む)
位置補正装置および位置補正プログラムおよび位置補正方法
【課題】 ある地点の位置を実際に測定し、測定した地点が過去に作成した地図のどの位置にあるのかを表す。この場合、過去に地図を作成した時点と位置を測定した時点とでは、地殻変動などにより各地点の位置が変化している場合がある。そこで、測定した地点を過去の地図における位置に高精度に補正し、配置することを目的とする。
【解決手段】 位置補正装置630は、過去に作成した地図の基準点の位置から測定した時点の基準点の位置への移動量を算出する。位置補正装置630は、算出した移動量に基づき、移動量が等しい線を結んだコンター図などのグラフを生成するなどして、移動量から補正情報を生成する。生成した補正情報に基づき、測定した地点の位置を補正することで、測定した地点を過去の地図における位置に高精度に補正し、配置することが可能である。
(もっと読む)
測位装置、測位方法および測位プログラム
【課題】 状況に応じて精度の高い測位結果を取得する。
【解決手段】 測位サーバ100において、通信部110は移動体の擬似距離と擬似距離補正値とを受信する。擬似距離補正測位部120は擬似距離補正値で擬似距離を補正し、補正した擬似距離を用いて測位する。また、通信部110は基準局の擬似距離と移動体の単独測位の結果とを受信する。単独測位部130は基準局の擬似距離を用いて基準局についての単独測位を行う。位置補正データ生成部140は基準局の単独測位結果と正確な座標値との差分から位置補正値を算出する。位置補正データスムージング処理部150はこれまでの位置補正値を平滑化した位置補正値を算出する。位置補正測位部160は位置補正値で移動体の単独測位の結果を補正して測位する。そして、測位結果選択部170は擬似距離補正測位部120の測位結果と位置補正測位部160の測位結果とで精度の高い方の測位結果を選択し出力する。
(もっと読む)
位置情報を持つ複数IDのグループ化方法および動線の予測もしくは補間を行う動線管理システム
【課題】動線管理システムにおける位置情報を取得するにあたって、IDタグの数が多量になり、ネットワーク上のデータトラフィックが膨大になることによって、必要な位置情報の取得の失敗や遅延が発生してしまう問題をリアルタイム性を損なわずに解決する。
【解決手段】無線範囲内に存在する複数IDタグの中から同じ動線を辿る集団を認識する為のIDタグ間の移動速度と進行方向とIDタグ間の指定範囲を比較しグループ化判定し、グループ動線を作成する手段。外挿法により動線予測を行う手段。内挿法により動線補完を行う手段。また、動線予測補完に於ける禁止領域への干渉を外部情報を持って管理する手段。
(もっと読む)
座標情報取得利用システム、座標情報取得利用システム用の受信端末、及び座標情報取得利用方法
【課題】 簡単な構成でGPSの電波が届かない環境下であっても位置の把握を行うことができる座標情報取得利用システム、座標情報取得利用システム用の受信端末、及び座標情報取得利用方法を提供する。
【解決手段】 GPS衛星2からの電波が受信出来ない場合は、無線タグ3からの位置情報より自己の座標情報を取得することにより、移動通信網やホストコンピュータを利用することがないので、簡単な構成でGPS衛星2からの電波が届かない環境下であっても自己の位置の把握を行うことができる。
(もっと読む)
位置推定方法、及び位置推定システム
【課題】 電波強度を用いずに、センサノードの記号的位置を推定するための位置推定システムを提供する。
【解決手段】 本発明の実施の形態に係る位置推定システムは、任意に配設された複数のセンサノードと、履歴DBと、計算装置とを備えている。複数のセンサノードには、記号的位置情報を有するキーセンサノードと、記号的位置情報を有していないセンサノードとが含まれている。履歴DBには、人を感知した順にセンサノードを特定するためのセンサ特定情報を登録した第1配列が格納される。計算装置は、第1配列に基づいて、複数のセンサノードのうちキーセンサノードのセンサ特定情報と他のセンサノードのセンサ特定情報とを含むグループを生成する。
(もっと読む)
路面電車位置検知装置
【課題】停留所における路面電車の発着を車両位置情報に基づいて的確に判定する。
【解決手段】路面電車20に搭載されて車両位置を検知する位置検知装置30において、位置情報を得るGPS受信機33と、路面電車20の速度計22から速度情報を取得し運転方向切換スイッチ23から運転方向を取得する速度情報取得装置35と、停留所の地上基地局装置に適合した無線機36と、路線マップデータを用いて位置情報を路線上に変換するマップマッチング手段と速度情報や運転方向に基づいて位置情報の更新を選択的に行う速度反映手段と停留所マップデータを用いて位置情報から路面電車20の出発および到着を判定する発着判定手段とを有した車上処理装置34とを備える。
(もっと読む)
追跡環境内において対象の位置を検出しイベント通知を発生する方法及びシステム並びにこれに用いるバッジ
【課題】
【解決手段】電磁スペクトルの無線周波数(RF)と赤外線(IR)部分の双方を用いて追跡環境内で対象(すなわち物又は人物)の位置を検出するのに用いる方法、システム及びバッジである。本システムは位置検出すべき対象用のバッテリ駆動するマイクロプロセッサ搭載のバッジを備える。各バッジは、(1)間隔が短くデジタル化した赤外線の光信号で範囲エリアを特定して対象の位置を特定する;(2)間隔が短くデジタル化した低出力のRF信号で対象の位置の狭域ゾーンを把握する;(3)間隔が長くデジタル化した高出力のRF信号で対象の位置の広域ゾーンを把握する。各バッジは、バッジに設けられた1以上の押しボタンスイッチが動作又は1以上の外部スイッチコネクタの状態が変化すると、固有の識別可能なIRと高出力RF信号とを発信する。高出力で間隔の長いRF信号は“管理用”パルスとなる。このパルスはホストコンピュータにRF受信器の受信範囲内にあり機能していることを伝達する。 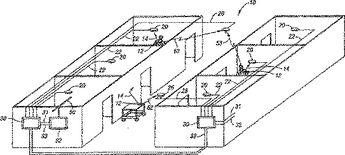 (もっと読む)
(もっと読む)
GPS受信機およびGPS受信機の測位方法
【課題】測位感度や測位スピードなどの性能を劣化させること無く、レンジの計算に必要となるレンジデータを周期的に取得でき、かつ、消費電力の省力化をも実現する。
【解決手段】周波数変換部4からのIFデータに対して、同期保持部6はキャリア周波数の同期、C/Aコードの位相同期を捕捉して保持し、レンジデータなどの必要な情報を取得する。レンジデータを取得した場合には、制御部7は、スイッチ23をオフにして同期保持部6への電源の供給を停止し、取得したレンジデータなどを用いて測位演算を行い、現在位置を示す測位情報を求めてこれを出力するが、測位情報の出力周期と、測位情報を求めるのにかかる時間に応じて、同期保持部6を停止させる時間を制御する。
(もっと読む)
測位システム、端末装置、通信基地局、端末装置の制御方法、端末装置の制御プログラム
【課題】通信基地局の大幅なシステム変更を必要とすることなく、通信基地局からの通信電波を使用する測位に使用するための相対的に精度が高い情報を選択的に提供することができる基地局間非同期方式の通信網における測位システム等を提供すること。
【解決手段】情報提供装置20A等は、測位手段による測位の精度を示す測位精度情報を生成する測位精度情報生成手段と、特定のフレームが送信された衛星時刻を示す送信衛星時刻情報を生成する送信衛星時刻情報生成手段と、通信基地局40が生成する送信時刻の基礎となる基礎周波数の偏移を示す周波数偏移情報に基づいて、送信時刻の誤差を示す送信時刻誤差情報を生成する送信時刻誤差情報生成手段等を有し、通信基地局40は、測位精度情報に基づいて、時刻情報を選択して、被選択時刻情報を取得する時刻情報選択手段等を有する。
(もっと読む)
測位システム、測位局、測位端末および測位方法
【課題】 1機の衛星を利用して衛星測位を行えるようにする。
【解決手段】 測位センター局100は移動衛星400を介して測位モニター局200と測位端末300とに信号を発信する(T1)。測位モニター局200と測位端末300はそれぞれ信号を受信して信号を返信する。測位センター局100は測位モニター局200と測位端末300とから信号を受信する(T4/T4’)。測位センター局100はT1からT4の時間とT1からT4’の時間との時間差に光速を乗じて移動衛星400からの測位モニター局200までの距離と測位端末300までの距離との距離差を算出する。次に、移動衛星400から測位モニター局200までの距離に距離差を加算して移動衛星400から測位端末300までの距離を算出する。そして、衛星軌道上を移動した移動衛星400の3点の位置からの測位端末300までの距離に基づいて測位端末300の位置を測位する。
(もっと読む)
測位システム、端末装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】通信基地局の大幅なシステム変更を必要とすることなく、通信基地局からの通信電波を使用する測位を可能にすることができる基地局間非同期方式の通信網における測位システム等を提供すること。
【解決手段】通信基地局20A等は、複数のフレームが乗せられた通信電波CS1等を送信する通信電波送信手段を有し、情報提供装置40は、送信衛星時刻情報生成手段と、周波数偏移情報生成手段等を有し、放送装置60は、時刻情報を放送する時刻情報放送手段等を有し、端末装置80は、端末側時刻情報受信手段と、通信基地局20A等から通信電波CS1等を受信する端末側通信電波受信手段と、端末側受信時刻情報生成手段と、3個以上の通信基地局20A等の基地局位置情報、送信時刻情報、送信衛星時刻情報、周波数偏移情報及び端末側受信時刻情報に基づいて、端末装置80の位置を測位する通信電波測位手段と、を有する。
(もっと読む)
順方向リンク中継器遅延ウォータマーク入れシステム
【課題】順方向リンク中継器遅延ウォータマーク入れシステム。
【解決手段】中継器情報を有する中継器信号をウォータマーク入れすることにより、中継器が存在する領域において、移動局の正確な位置の配置を可能にさせる、順方向リンク中継器遅延ウォータマーク入れ(FLRFWM)システムおよび方法。中継器は、信号が中継器を通過する全ての時間に、(ユニークまたは非ユニーク)時間遅延変調波形ウォータマークを有する順方向リンク信号をウォータマーク入れする。移動局は、AFLTおよび/またはA−GPSシステムを使用して位置の配置を決定するネットワーク位置決定要素または移動局位置の配置システムを支援する中継器情報を決定するために、順方向リンク信号上の時間遅延ウォータマークを検出しおよび/または識別する。 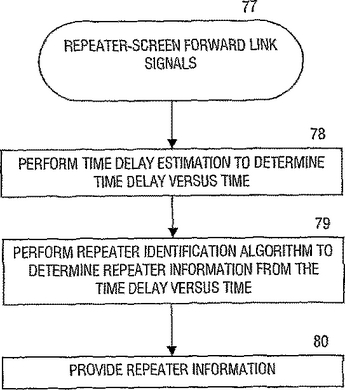 (もっと読む)
(もっと読む)
ネットワーク測位システム(NPS)を設けるための方法、及び、装置
【課題】衛星不明瞭環境における位置測定の達成。
【解決手段】地上設置型のネットワーク測位システム(NPS)は、GNSSの如き信号と、地上設置型の測位ユニット装置から成るGNSS同期ネットワークから送信される他の地上設置型の測位ユニット装置の測位信号とを使用する。これらの測位ユニット装置は、衛星不明瞭環境における絶対及び相対位置の決定について使用され、屋外から屋内への如きGNSSとNPSとの間の継ぎ目のない移行及び、GNSS無しでの継続的な動作を可能にする。さらに、これらの測位ユニット装置は、自己統合的であり、追加の測位装置をGNSS及び/又はNPSネットワークへの組み込むことを労力を必要としないで可能にする。
(もっと読む)
測位システム、端末装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】基地局の大幅なシステム変更を必要とすることなく、3つ以上の基地局からの信号を受信できない場合であっても測位することができる基地局間非同期方式の通信網における測位システム等を提供すること。
【解決手段】通信基地局20A等は、基地局位置情報152を格納する基地局位置情報格納手段と、送信時刻における送信時刻と衛星時刻との時差を示す時差情報160を生成する時差情報生成手段等を有し、端末装置50は、通信基地局20A等から、基地局位置情報152及び時差情報160を取得する基地局情報取得手段と、端末装置50の上空に位置する測位衛星12a等である上空衛星の数を判断する上空衛星数判断手段と、上空衛星の数に基づいて、衛星信号測位手段、通信用信号電波測位手段、又は、複合測位手段のいずれかを選択する測位手段選択手段等を有する。
(もっと読む)
順方向リンク中継器周波数透かし入れシステム
中継器情報を有する中継された信号に透かしを入れることにより、中継器が存在する領域内の移動局の正確な位置決定を可能とする順方向リンク中継器周波数透かし入れ(FLRFWM)システムと方法。中継器は、信号が中継器を通過するときはいつも、(一意的または非一意的な)高速周波数変調波形の透かしで順方向リンク信号に透かしを入れる。移動局は、順方向リンク信号上の高速周波数透かしを検出および/または識別し、AFLTおよび/またはA−GPSシステムを用いて位置決定を行う際、ネットワーク位置決定エンティティまたは移動局の位置決定システムを支援する中継器情報を決定する。ここに説明する順方向高速周波数透かし入れシステムは、FL、AFLT、およびGPS特性への最小の影響と、良好な検出、識別および誤り検出確率と、検出/識別までの時間が短いことと、良好な検出/識別感度とを達成する。 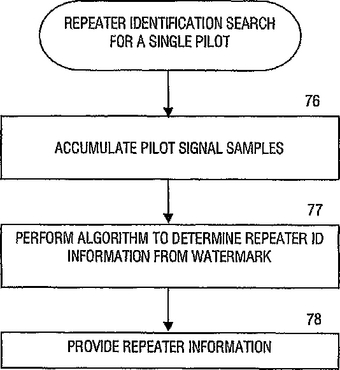 (もっと読む)
(もっと読む)
301 - 320 / 405
[ Back to top ]