
Fターム[5J062DD21]の内容
Fターム[5J062DD21]の下位に属するFターム
Fターム[5J062DD21]に分類される特許
381 - 400 / 405
位置測位装置を有する移動体情報端末
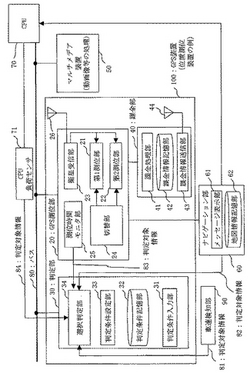
【課題】 CPUの負荷に応じて測位部を選択し、CPU負荷の分散、軽減を図る。また、場面に応じて必要とする測位精度の測位部を選択する。
【解決手段】 GPS測位部20は、第1測位部21と第2測位部22とを備える。第1測位部21は準天頂衛星から高精度測位情報を受信し、高精度測位情報に基づき、第2測位部22よりも精度の高い高精度測位方式で測位する。第2測位部22はGPS単独測位を行なう。切替部24は2つの測位部を選択的に切り替える。切替部24は、判定部30が出力する判定信号に従い測位部を切り替える。判定条件設定部33は判定条件を設定し判定条件信号として選択判定部34に出力する。選択判定部34は入力した判定条件信号と車速検知部90等から入力される判定対象信号81等に基づきどちらの測位部を選択するかの判定を行う。選択判定部34は判定結果を判定信号として切替部24に出力する。
(もっと読む)
測位情報装置及びダウンコンバータIC

【課題】従来のGPSとVICSを統合して回路規模は縮小可能であるが、カーナビゲーション装置として大切な測位精度の向上に関しては、改善されておらず、回路を統合してもGPSの測位性能を向上させることができない。
【解決手段】測位情報装置は、GPS/VICS統合アンテナ1に接続されたダウンコンバータIC50と、光アンテナ2に接続された光送受信部17と、路上機の座標情報が予め記憶された座標情報メモリ21と、制御部20を備えている。さらにダウンコンバータIC50はGPS/VICS切替器6を有し、制御部20により信号を切替え、VICS情報によりGPSの測位精度を向上させる。
(もっと読む)
セルラ通信システムを使用する位置決定システム
移動局の位置を決定するためにセルラ基地局のネットワークを利用する位置決定システムと装置は、基地局からのパイロット信号の複数の統計的に独立しているデータ測定値を取ることを含んでいる。それぞれのデータ測定値は各パイロット信号について多重の独立している測定値を提供している到着の最も早い時間を含んでいる。それぞれのセルラ基地局に関して、代表的な測定値が独立している測定値に応答して計算され、それはAFLTアルゴリズムおよび/またはGPSアルゴリズムと関連して使用することにより移動局の位置を決定するために使用される。幾つかの実施例では、各パイロット信号のデータ測定値は、さらに到着の各時間についてRMSE推定値と測定の時間、およびすべての解明可能な経路に関するエネルギー測定値を含んでいる。移動局が携帯電話を含むならば、セル検索リストとGPS検索リストはセルラ基地局によって提供されるかもしれない。  (もっと読む)
(もっと読む)
衛星利用測位システムの改良
弱信号の衛星送信を用いて受信機の場所を算出する方法、装置およびシステム。本発明は、補助情報を受信機に供給する役目を果たす、補助情報源と受信機の間の一連のやり取りを含み、弱い衛星送信の存在下で受信機の場所を算出できるようにする。新規の受信機は、弱い衛星信号中では時刻同期日fを抽出できないにもかかわらず、補助情報を用いて、弱い衛星信号を検出、捕捉および追尾し、計算した擬似レンジから位置解を計算する。本発明は、局部発振器の校正、相互相関の相殺、ドップラー場所方式、アンサンブル平均化方式、軌道係数テーブルからのアルマナック補助情報の計算、絶対時間の算出、および改良型検索エンジンのための方法および装置を特徴として含む。  (もっと読む)
(もっと読む)
情報処理システム、携帯端末およびプログラム
【課題】従来の情報端末の位置特定方法では、機器構成が複雑である。
【解決手段】2以上の位置情報送信装置と、携帯端末を有する情報処理システムであって、位置情報送信装置は、当該位置情報送信装置の位置を示す情報である位置情報を保持している位置情報保持部と、位置情報を送信する位置情報送信部を具備し、2以上の位置情報送信装置の位置情報送信部は、異なるタイミングで、順次、かつ繰り返し位置情報を送信し、携帯端末は、1以上の位置情報送信装置から、順次、1以上の位置情報を受信する位置情報受信部と、位置情報受信部が受信した1以上の位置情報に基づいて、当該携帯端末が存在する領域を決定する領域決定部と、領域に基づいて情報を出力する情報出力部を具備する情報処理システムであり、かかる構成により、簡易な構成で、ユーザが居る領域に適した情報を、ユーザは得ることができる。
(もっと読む)
可動固定局およびアンチジャミング測位システム
【課題】 測位用データに対するジャミングが存在し、加えて固定局が十分に無い場所において、移動局が測位を行えるようにすることを目的とする。
【解決手段】 可動固定局100は、移動制御部141の移動制御により移動する。移動先において、不要波検出部112は、測位用衛星から測位用データを受信し、受信に対して不要波を検出し、検出した不要波の方向データを不要波方向記憶部191に記憶する。アンテナ制御部113は、第1アンテナ部111に対して、不要波方向データが示す方向からの受信を抑制する。測位部114は、測位用データで測位して固定局位置データを固定局位置記憶部192に記憶する。対移動局通信部122は、固定局位置データを含む電波を移動局に送信する。移動局は、可動固定局100が発信した電波の強度と、電波の通信時間との少なくともいずれかと、電波に含まれる固定局位置データとに基づいて測位する。
(もっと読む)
遠隔受信器において長期衛星追跡データを使用する方法及び装置
遠隔受信器において長期衛星追跡データを使用する方法及び装置。一例においては、遠隔受信器にてサーバーから長期衛星追跡データを受信する。長期衛星追跡データは、遠隔受信器において取得支援データを計算する目的に使用する。遠隔受信器は、取得支援データを使用して衛星信号を取得する。取得した衛星信号を使用して、遠隔受信器の位置を特定することができる。  (もっと読む)
(もっと読む)
GPSを用いて遠隔装置の位置を判定する方法および装置
GPSを装備した装置による位置判定高速化という要望に対処するために、本願で記載する本発明の実施形態は、自己の位置を判定している遠隔装置(110)にGPS支援データを供給する。このGPS支援データは、特定の遠隔装置を収容する格子要素の中心点に関する。格子要素とは、地理的領域であり、その内部では、格子要素内のどこからでも、同一の12機以上のGPS衛星を見ることができる。格子要素についてGPS支援データを供給することにより、遠隔装置は、十分に局地的な性質のGPS支援データを受信し、その位置をより迅速に判定するのに役立つ。また、米国のような領域全域におけるセル・サイトよりははるかに少数の格子要素があるに過ぎないので、格子要素毎に現GPS支援データを維持しても、セル・サイト毎に維持する場合よりも、必要なネットワーク帯域幅は少なくて済む。  (もっと読む)
(もっと読む)
測位環境情報生成装置、測位環境情報生成方法、測位環境情報生成装置の制御プログラム及び測位環境情報生成装置の制御プログラムを格納したコンピュータ読み取り可能な記録媒体
【課題】航空写真を必要とせず、衛星電波の不到達以外の障害についての情報も提供することができる測位環境情報生成装置等を提供すること。
【解決手段】測位環境情報生成装置20は、経路情報と、構造物情報を含む地図情報と、経路情報と測位環境情報生成範囲情報に基づいて、測位環境情報生成範囲における経路である対象範囲経路を示す対象範囲経路情報を生成する対象範囲経路情報生成手段と、構造物情報と対象範囲経路情報に基づいて、対象範囲経路における測位の障害となる構造物である測位障害物を抽出して測位障害物情報を生成する測位障害物情報生成手段と、測位障害物情報に基づいて、対象範囲経路における測位端末16の測位の環境を示す測位環境情報を生成する測位環境情報生成手段等を有する。
(もっと読む)
位置表示端末
【課題】 GPS衛星からの電波を受信できない領域でも当該位置表示端末の自位置を把握することが可能な、位置表示端末を提供する。
【解決手段】 位置表示端末10は、境界装置30から入場情報を受信する情報受信部12と、全地球測位システムを利用して位置表示端末10の自位置を取得する第1位置取得部14と、位置表示端末10の加速度に基づいて、位置表示端末10の移動距離を測定する距離測定部16と、位置表示端末10の主軸線の向く方位と、位置表示端末10の移動距離と、に基づいて、基準位置からの相対的な移動ベクトルを算出する移動算出部18と、移動ベクトルに基づいて位置表示端末10の自位置を取得する第2位置取得部20と、自位置に応じた地図を表示する表示部24と、を備える。
(もっと読む)
無線ネットワークシステム
【課題】無線ネットワークシステムの広域展開と情報密度の細密化を両立するため、細粒度の位置基準設置作業を省力化し、広域でも高精度化が可能な測位システムを提供する。
【解決手段】広域で粗粒度の測位手段を有する無線ノード(シンク)と、狭域で細粒度の測位手段を有する無線ノード(ピアノード)と、両者を併有する無線ノード(ハブ)により階層無線ネットワークを構成し、位置基準であるシンクからハブへ、ハブからピアノードへ階層的に位置を推測し、細粒度の測位結果をフィードバックして補正することにより、広域でも細粒度の位置精度で測位を行なうことを可能にする。
(もっと読む)
ナビゲーション装置および建築施設進入判定方法
【課題】 加速度センサや傾斜センサなどの別機器を配備することなく、車両が駐車場に入ったことを精度高く、かつ、早期に検出することが可能な「ナビゲーション装置および建築施設進入判定方法」を提供する。
【解決手段】 GPS受信機から取得される衛星配置情報により示される衛星配置パターンに基づいて、車両が駐車場に入ったか否かを判定することにより、GPS受信機があれば駐車場への進入を検出できるようにして別機器の配備を不要とするとともに、自車位置の情報に基づくマップマッチングの影響を受けることもなく、車両が駐車場に入ったことを精度高く検出できるようにする。さらに、駐車場の入口付近で受信される衛星配置情報を利用することで、車両が駐車場の内部に入り込まなくても進入の有無を判定できるようにする。
(もっと読む)
支援された無線位置判断システムのための向上したデータメッセージング効率
支援された無線位置判断システムは、複数の基地局と、基地局と通信するように適応させられた、移動電話およびパーソナルディジタルアシスタントのような、複数の無線デバイスとを含む。無線位置判断システムは、無線デバイスの地理的位置を判断する位置判断システムも含む。位置判断システムは、位置判断エンティティ(position determination entity, PDE)を含み、これは、基地局に接続され、無線デバイスの位置を計算するプロセシングサーバとしての役割を果たす。システムおよび方法は、冗長の、または余分なデータを低減または削除する。さらに加えて、システムおよび方法は、無線デバイスが追加の容量を負わされないことと、無線デバイスが精密な位置情報を与えられることを保証する。本発明のシステムおよび方法の実施形態は、TIA/EIA IS−801の標準または他の標準に準拠する。 (もっと読む)
GPS電波陰影地域で位置探索器を用いて端末機の位置を測位する方法及びシステム
【課題】本発明は、GPS電波陰影地域でLDパイロット信号を受信する地域を区分する方式により端末機の位置を測位する方法及びシステムを提供するためのものである。
【解決手段】本発明は、GPS電波陰影地域において、端末機、オフセット(Offset)を人為的に生成させて送出する位置探索器(Location Detector)、前記端末機の位置測位を全般的に制御する位置決定サーバ及び位置情報関連データベースを含むLDマッピングサーバを用いてCDMA移動通信網で端末機の位置を測位する方法であって、(a)位置測位要請を受けた前記端末機において、基地局または中継器の基準パイロット信号及び前記位置探索器で発生されるLDパイロット信号を獲得するステップと、(b)前記基準パイロット信号または前記LDパイロット信号の強さが一定大きさ以上に受信された場合、一定大きさ以上の前記基準パイロット信号の情報または前記LDパイロット信号の情報をPSMM(Pilot Strength Measurement Message)を用いて前記位置決定サーバに伝送するステップと、(c)前記位置決定サーバに伝送された前記PSMMからチップ(Chip)単位の擬似雑音コード位相値を計算するステップと、(d)前記(c)ステップで計算された前記擬似雑音コード位相値が位置測位用に割り当てられた位置測位用擬似雑音コードの位相値である場合、前記擬似雑音コード位相値を前記LDマッピングサーバに伝送するステップと、(e)前記LDマッピングサーバに伝送された前記擬似雑音コード位相値を用いて前記端末機の位置情報を獲得するステップと、を含むことを特徴とする。
(もっと読む)
移動体端末及び加速度情報に基づき位置を決定するための方法
移動体端末が受信した無線通信信号(GPS信号、衛星信号、セルラー信号、ワイド・エリア・ネットワーク信号、無線ローカル・ネットワーク信号等)に基づいて加速度計測回路が校正される。そして、当該移動体端末の位置が、校正された加速度計測回路を利用して決定される。よって、加速度計測回路の校正により、その精度が改善され、結果として位置決定精度も改善される。異なる実施形態では、移動体端末の位置は、(GPS信号などの無線通信信号を用いて推定される)第1の位置と、(第1の位置からの移動体端末の移動距離を計算するために利用される加速度情報に基づいて計算される)第2の位置とを結合することにより決定される。 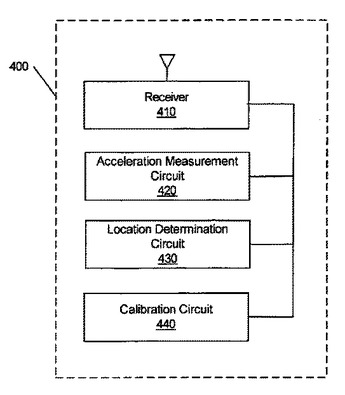 (もっと読む)
(もっと読む)
移動プラットフォームの衛星ベースの相対測位のための方法および装置
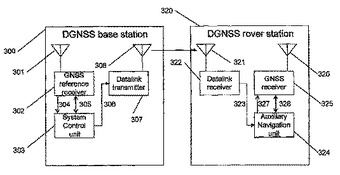
本発明は、衛星ベースのナビゲーション技法および移動するプラットフォームに設置された設備を用いた、移動するプラットフォーム間の相対的位置の決定を対象とする。本発明は、観測スペースおよびナビゲーションスペースのディファレンシャルシステムのコンセプトを組み合わせ、データリンクローディングおよび付加的プロセッサの計算負荷を最小化する際に特定のGNSS受信機のビルトインディファレンシャル測位およびナビゲーション能力に依拠するために、DGNSS基準局を時変モードで動作させる。本発明は、参照局モードで動作中にそれは静止していると仮定するDGNSS設備を用いて、移動している基準局に関して正確な相対測位およびナビゲーションを達成する。
 (もっと読む)
(もっと読む)
測位システム
本発明は、測位システムをインストールする方法であって、前記測位システムは2以上の基地局(BS1乃至BS4)を有し、前記方法は、前記基地局(BS1乃至BS4)を並置するステップと、前記基地局のクロック間のいずれかの同期の欠如を定量化するステップと、1以上の前記基地局(BS2’乃至BS4’)をそれぞれの固定された動作位置へと再配置し、該再配置された基地局のそれぞれからの信号の飛行時間を測定するステップと、前記飛行時間及び前記定量化された同期の欠如のデータから、前記基地局(BS1、BS2’乃至BS4’)の相対的な間隔、及びそれ故前記インストールされる測位システムの構成を決定するステップと、前記インストールされる測位システムの構成を記録するステップと、を有する方法。を提供する。システムの構成を定義するデータが、個々の基地局によって発信される信号の飛行時間と共に、インストールされた測位システムの近隣におけるモバイル送受信器に中継されることができる。基地局のクロックの同期のいずれかの実時間の欠如を定量化するデータが、該測位システムによって定義される地理的エリア内における送受信器の位置を決定するために該送受信器によって利用される。  (もっと読む)
(もっと読む)
GPS電波陰影地域におけるGPS端末機及び位置探索器を利用した、端末機の位置測定方法及び位置測定システム
本発明は、携帯端末を含むマッピングサーバ、位置探索器、位置測定サーバ、データベースを用いて、GPS電波陰影地域においてGPS端末機の位置を測定する方法であって、(a)基地局または中継器の基準パイロット信号及び位置探索器からのLDパイロット信号を獲得するステップと、(b)基準パイロット信号またはLDパイロット信号の強度が所定の値以上であった場合、基準パイロット信号の情報またはLDパイロット信号の情報を位置測定サーバに伝送するステップと、(c)基準パイロット信号情報またはLDパイロット信号情報からチップ単位の擬似雑音コード位相値を計算するステップと、(d)ステップ(c)で計算された擬似雑音コード位相値が、測位用に割り当てられた測位用擬似雑音コードの位相値である場合、擬似雑音コード位相値をLDマッピングサーバに伝送するステップと、(e)ステップ(d)で伝送された擬似雑音コード位相値を利用してGPS端末機の位置情報を獲得するステップと、GPS端末機の位置測定方法である。 (もっと読む)
TDOA/GPS混成ワイヤレス位置検出システム
セルラ電話通信システムにおいて、移動ワイヤレス送受信機(MS)について判定する位置の精度およびロバスト性を高める方法およびシステムを提供する。移動ユニット内に埋め込まれている補助GPSデバイス、およびネットワーク状基地局(105)において信号特性データを抽出するインフラストラクチャに基づく設備双方からの位置関連情報を統合する。利用可能な支援付随情報も、付加的に、位置判定において評価し、ロバスト性および精度を高めた位置推定値を得ることができる。  (もっと読む)
(もっと読む)
遠隔受信機によって使用される衛星追跡データの完全性を監視する方法及び装置
遠隔受信機によって使用される衛星追跡データの完全性を監視する方法及び装置が開示される。一実施例では、第1の衛星追跡データのセットはサーバーで受信される。第2の衛星追跡データのセットの完全性データは第1の衛星追跡データのセットを使用して生成される。完全性データは次に第2の衛星追跡データのセットを有する少なくとも1台の遠隔受信機へ発信される。 (もっと読む)
381 - 400 / 405
[ Back to top ]