
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
361 - 380 / 1,245
二次監視レーダ
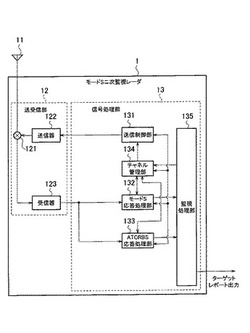
【課題】航空機から受信する拡張スキッタを利用してロールコール期間における航空機の捕捉を行なう。
【解決手段】監視空域を飛行する航空機に質問信号を送信する送信手段122と、監視空域を飛行する航空機から送信された信号を受信する受信手段123とを備え、応答信号を受信すると、当該応答信号を利用して航空機の飛行を監視する二次監視レーダであって、受信手段が、航空機から送信された航空機の識別子及び位置情報を含む拡張スキッタを受信すると、当該拡張スキッタに含まれる位置情報を利用して、航空機が所定範囲に存在する否かを判定する位置判定手段135dと、位置判定手段によって、航空機が所定範囲に存在すると判定されると、当該航空機をロールコール期間の捕捉対象と決定し、当該航空機から受信した拡張スキッタに含まれる航空機の識別子及び位置情報を利用して、送信手段に質問信号を送信させる送信制御手段131とを備える。
(もっと読む)
受信波の相関行列算出装置及び受信波の相関行列算出方法、並びに波源方向推定装置及び波源位置推定装置

【課題】波源の帯域幅が狭い場合にも波源相互相関値を低減することができる受信波の相関行列算出装置を提供する。
【解決手段】受信波の相関行列算出装置は、アレーアンテナ24aにより電波を受信して相関行列を算出する。受信波の相関行列算出装置は、受信波の方向行列の位相を回転し、位相回転された方向行列を含む相関行列を周波数平均して平均化された相関行列を算出する。
(もっと読む)
レーダ装置
【課題】衝突危険度の高い物標を確実かつリアルタイムに把握することができるレーダ装置を提供する。
【解決手段】レーダ装置は、レーダアンテナ1と、表示器8と、速度推定部22と、データ発生部6と、を備える。レーダアンテナ1は、水平面内で回転しながらパルス状の信号の送受信を繰り返す。表示器8は、自装置周囲の物標の位置を示すレーダ映像を表示する。速度推定部22は、自装置からの電波の放射方向成分における自装置と物標との相対速度を推定する。データ発生部6は、速度推定部22が推定した前記物標の相対速度に基づいて当該物標の危険度を求める。また、速度推定部22は、レーダアンテナ1が今回受信したエコーと、当該レーダアンテナ1が直前に受信したエコーと、の間の位相変化に基づいて前記相対速度を検出する。そして、表示器8は、前記レーダ映像を表示する際に、危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
(もっと読む)
車両用物体検知装置
【課題】車両の外部に存在する物体の静止および移動の状態を精度良く検知する。
【解決手段】車両用物体検知装置10は、レーダ装置12と、物体上における電磁波の反射点の位置を算出する反射点算出部21と、複数の反射点の位置に基づき物体の幅を算出する検知対象幅算出部22と、複数の反射点の位置に基づき物体の代表点の位置を設定する代表点設定部23と、反射点又は代表点の位置の変化量に基づき物体の自車幅方向の相対速度となる横相対速度を算出する横相対速度算出部24と、所定周期毎に検知された物体の検知履歴に基づき、物体が静止物であり、かつ、物体の幅の増大量が変化量閾値Wthrよりも大きい場合に、物体を幅広がり静止物として記憶する記憶制御部25および静止物記憶部26と、幅広がり静止物として記憶された物体がレーダ装置12のレーダ検知端にて検知された場合に横相対速度を補正する横相対速度補正部27とを備える。
(もっと読む)
信号を決定する装置および手法
【課題】テプリッツ行列、またはブロックテプリッツ行列を係数行列とする連立方程式の求解効率を大幅に上げる。
【解決手段】初期連立方程式を、巡回または近似的に巡回である行列の積に分離し、次数を縮小した多数の連立方程式に分離した後で、次数が少なくなった連立方程式の解をもとに初期連立方程式の解を計算する。
(もっと読む)
目標検出装置
【課題】レーダセンサを用いて受信信号から目標を検出する目標検出装置において、SN比が低い条件で目標を検出するため、動的計画法を用いて目標信号の積分路を探索する際の積分路の重複と、それによる誤警報発生の防止または抑制、及び動的計画法を用いて目標信号の積分路を探索する際の積分路探索処理の効率化を目的とする。
【解決手段】レーダセンサを用いて受信した信号に対する信号処理結果であるビデオ信号の各検出セルの状態推定を行うセル状態推定部を設け、セル状態推定部による状態推定結果および動的計画法における積分路探索時の評価値であるtrack scoreの分布状況に基づいて次スキャンにおける探索条件を設定する探索条件設定部を設ける。
(もっと読む)
気象レーダ装置及び気象観測方法
【課題】三次元気象データを時間及び空間的に高解像度で収集すること。
【解決手段】気象レーダ装置は、レーダパルスを送信し、反射パルスを受信する複数のアンテナ素子を鉛直方向に配列したアクティブフェーズドアレイ方式のアンテナユニット11と、仰角方向の観測範囲を複数の観測仰角に分割し、各観測仰角を複数の領域に区分し、互いに隣接しない複数の領域のセットをパルス送信繰り返し間隔(PRI:Pulse Repetition Interval)に割り当て、前記セット内の各領域に対して前記仰角方向にファン形状の送信ビームをそれぞれ形成する送信ビームユニット12と、前記複数の領域のそれぞれに対してペンシル形状の複数の受信ビームを形成する受信ビーム形成ユニット21とを具備する。
(もっと読む)
偏波レーダ装置
【課題】 従来の偏波のレーダは偏波を時分割で切替えて送受信するため、偏波信号処理に必要な偏波データが揃うのに時間を要し、数フレームに一回しか処理結果が得られなかった。このため終末誘導時の誘導信号の出力レートが低く、機体の誘導精度が低下するという課題があった。
【解決手段】 終末誘導時には送信偏波(V送信)を固定し、受信した片偏波(例えばVV、HV)のビデオ信号から特徴量を抽出する。抽出した特徴量と、初中期誘導時にメモリしたビデオデータベースから偏波信号処理に必要な他の片偏波(HH、VH)のビデオ信号を推定し、受信したビデオ信号(VV、HV)と推定したビデオ信号(HH、VH)で偏波信号処理を実施する。これにより1フレームのビデオ信号から偏波信号処理が実施可能になるため、従来と比べて2倍の更新レートが得られ機体の誘導精度が向上する。
(もっと読む)
レーダ装置
【課題】ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得る。
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
(もっと読む)
障害物認識装置及び車両制御装置
【課題】車載カメラとミリ波レーダとのセンサ情報から取得するセンサ情報の組み合わせ精度を向上させて、より正確に障害物の認識をする障害物認識装置を提供する。
【解決手段】複数のセンサ情報を組み合わせて障害物の認識を行う障害物認識装置であって、障害物に関する第一パラメータ情報を取得する前方カメラ201と、障害物に関する第二パラメータ情報を取得するミリ波レーダ202と、前方カメラ201で取得した第一パラメータ情報とミリ波レーダ202で取得した第二パラメータ情報とに基づき、前方カメラ201又はミリ波レーダ202の方位角の軸ずれ量を算出し、算出された軸ずれ量に基づいて前方カメラ201又はミリ波レーダ202の軸ずれを補正する補正部203aと、軸ずれ量を記憶する記憶部203cとを備える。
(もっと読む)
レーダ制御装置、該装置に用いられるレーダ監視覆域設定方法及びレーダ監視覆域設定プログラム
【課題】限定された数のレーダを用いて多数の目標を探知する場合に、目標の出現が予想される地点が効率的に含まれるようにレーダの監視覆域を設定するレーダ制御装置を提供する。
【解決手段】監視覆域候補計算手段20により、目標予想点情報fcに対してレーダR1 ,R2 毎に階層的クラスタリングが行われ、クラスタリング結果のクラスタからレーダR1 ,R2 の監視覆域の組合せの候補caが算出される。監視覆域組合せ計算手段30により、監視覆域の組合せの候補caの中から、一方のレーダで探知され、かつ他方のレーダで探知されない目標予想点が探知される監視覆域から優先的に漸次決定することにより、レーダR1 ,R2 の監視覆域が算出される。最急降下法計算手段40により、監視覆域組合せ計算手段30で算出された全てのレーダの監視覆域に対応するパラメータを初期値として、最急降下法を用いて評価関数の値が最大となる監視覆域のパラメータmaが算出される。
(もっと読む)
車両用外界認識装置及びそれを用いた車両システム
【課題】安全性確保と処理負荷低減の両立を図ることができる車両用外界認識装置及び車両システムを提供する。
【解決手段】車両用外界認識装置100は、自車の予測進路と自車前方の検知物体の情報に基づいて自車が検知物体に衝突する危険度を演算する第1の衝突判定手段103と、検知物体が予測進路の外から予測進路内に進入するか否かを判定する第2の衝突判定手段104を有する。そして、複数の検知物体の中から、危険度が第1の閾値以上である検知物体と、予測進路内に進入すると判定された検知物体とを選択候補物体として選択し、その選択された複数の選択候補物体の中から、自車との相対距離が最小となる選択候補物体を歩行者判定要求物体として選択する物体選択手段105を有する。そして、その選択された歩行者判定要求物体に対して画像情報を用いて歩行者か否かを判定する歩行者判定手段106を有する。
(もっと読む)
ネットワークセンサ装置
【課題】既存レーダシステムへの改修を最小限に抑えて、他センサシステム由来のセンサ情報と既存のレーダシステムの情報とを融合表示可能にする。
【解決手段】他センサシステム300からの時刻毎の当該他センサによる観測情報を、既存レーダシステム200の位置情報に基づいて既存レーダシステム向けの変換済他センサ観測情報に変換する情報変換部101と、センサ部203で観測し、表示部201で表示するようにした形式の自センサ観測情報を受信し、当該観測情報と変換済他センサ観測情報とを照合して自センサ観測情報の時刻列に合わせた時刻同期変換済他センサ観測情報を生成し、自センサ観測情報と時刻同期変換済他センサ観測情報の相関に従って観測対象の割り当てを行って融合センサ情報を算出し表示するために出力する融合部102を備える。
(もっと読む)
無線IDタグのマッピングデータ作成装置及び方法
【課題】本発明は、多数の無線IDタグが配列されたシート体について無線IDタグのマッピングデータを効率よく行うことができる無線IDタグのマッピングデータ作成装置を提供することを目的とするものである。
【解決手段】複数の無線IDタグが配列されたシート体Sを搬送し、読取部10において所定の読取位置に位置決めされた読取素子により搬送移動中の無線IDタグと個別に交信してIDデータを取得し、測定部30において搬送移動中のシート体の搬送距離を測定し、読取部10おいて取得されたIDデータ及び当該IDデータの取得時に測定された搬送距離に基づいて無線IDタグのマッピングデータを作成する。
(もっと読む)
水栓装置
【課題】 電波センサから放射される電波を導波管を通じて吐水空間に電波を放射することにより、スパウトや受水部の形に関係なく被洗浄物を検知することを可能とする。
【解決手段】 本発明では、吐水部であるスパウト内部に導波管と水路配管を構成し、吐水口から吐水空間に向かって電波を放射させる際に水流のみの状態と、水流に対して被洗浄物が干渉して飛散水が発生したときの状態との差を速度成分として抽出するために、導波管と水路配管を併設させたため、水栓装置を利用している際の検知精度を確保でき、使用中に誤って止水することのない、使い勝手のよい水栓装置を提供することができる。
(もっと読む)
支障物検知システムおよび支障物検知装置
【課題】支障物検知装置の検知精度を向上させる。
【解決手段】支障物監視区域の両側に敷設された漏洩同軸ケーブル101,102、および前記両側に敷設された漏洩同軸ケーブルのうち一方の漏洩同軸ケーブルから他方の漏洩同軸ケーブルに向けて電波を放射させ前記他方の漏洩同軸ケーブルに入射した電波に基づいて前記支障物監視区域内の支障物を検知する支障物検知装置を備えた支障物検知システムであって、前記支障物検知装置における前記一方の漏洩同軸ケーブルへ前記電波を送信する電波送信手段と前記支障物検知装置における前記他方の漏洩同軸ケーブルが入射した電波を受信する電波受信手段とを繋ぐ手段110を備えている。
(もっと読む)
接近検知システム
【課題】ターゲットがどのような位置に存在していても、これを確実に検知することのできる接近検知システムを得る。
【解決手段】センサ100a、同軸ケーブル202a,212a、漏洩ケーブル201a,211a、終端器203a,213aからなる一方の組と、センサ100b、同軸ケーブル202b,212b、漏洩ケーブル201b,211b、終端器203b,213bからなる他方の組とを備える。3次元位置計測手段500は、センサ100a,100bで求められたターゲット400の電波送受信手段200a,200bの長手方向の距離Z1,Z2と、電波送受信手段200a,200bから離れる方向への距離R1,R2とに基づいて、ターゲット400の3次元位置を求める。
(もっと読む)
SAR(SyntheticApertureRadar)重畳データ生成装置、SAR重畳データ再生装置、SAR重畳データ生成プログラム、SAR重畳データ再生プログラム、SAR重畳データ生成方法およびSAR重畳データ再生方法
【課題】SAR(合成開口レーダー)と光学センサとによる同時観測においてSAR画像と同じデータ量でSAR画像と光学画像とを伝送し、地上での画像再生処理においてSAR画像と光学画像とを別々に画像化できるようにすることを目的とする。
【解決手段】SAR/光学観測衛星110では、(1)SAR111と光学センサ112とにより地上の同じ地域を観測し、(2)SAR/光学伝送装置200によりSAR111の観測データと光学センサ112の観測データとを重畳させた重畳データを生成し、(3)重畳データをダウンリンクする。地上センタ120では、(4)SAR/光学再生装置300により重畳データからSAR画像と光学画像とを再生する。(2)においてSAR/光学伝送装置200は、光学センサ112で撮像した光学画像に対してSAR再生処理の逆処理をし、逆処理した光学画像を符号化して光学センサ112の観測データを生成する。
(もっと読む)
画像処理装置及び無線通信装置及び画像処理方法及び画像処理プログラム
【課題】能動的に電波を放射する無線通信装置を利用しつつ、無線通信装置を利用しない場合と同様の地上のレーダ画像を得て、無線通信装置の位置に基づき、レーダ画像を高精度で補正する。
【解決手段】合成開口レーダ200はチャープ率kでチャープ変調した送信パルスを送信し、地上で反射した信号を受信信号として受信する。RFIDタグ300は送信パルスを受信すると、別のチャープ率k’でチャープ変調した放射パルスを送信し、受信信号の一部として合成開口レーダ200に受信させる。画像処理装置401は、受信信号をチャープ率kでレンジ圧縮する等により通常の地上のレーダ画像を再生する。また、受信信号をチャープ率k’でレンジ圧縮する等によりRFIDタグ300が映った画像を再生し、この画像とRFIDタグ300の位置情報とに基づいて地上のレーダ画像を補正する。
(もっと読む)
水栓装置
【課題】 電波センサから放射される電波を導波管を通じて吐水空間に電波を放射することにより、スパウトや受水部の形に関係なく被洗浄物を検知することを可能とする。
【解決手段】 本発明では、吐水部であるスパウト内部に導波管と水路配管を構成し、吐水口から吐水空間に向かって電波を放射させる際に水流に電波をぶつけるように導波管を水路配管の下側に配置したため、吐水口下方の電波強度が向上するために、吐水中に水流の下側の方で水を使われる場合においても検知精度を確保できるため、使用中に誤って止水することのない、使い勝手のよい水栓装置を提供することができる。
(もっと読む)
361 - 380 / 1,245
[ Back to top ]