
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
341 - 360 / 1,245
移動体検出方法及び移動体検出装置
【課題】データ処理を複雑化することなく、また、装置構成を大規模とすることなく、複数の移動体を区別して追跡することができる移動体検出方法及び移動体検出装置を提供する。
【解決手段】検出対象となる移動体までの距離を検出する測距センサ1を用いて複数の移動体までの距離をそれぞれ検出し、各移動体までの距離に基づいて各移動体の速度を算出して記憶し、二以上の移動体までの距離が互いに等しくなりその後にこれらの距離が異なるものとなったときには、記憶されていた各移動体の速度に基づいて、各移動体を区別する。
(もっと読む)
スプリットビーム方式合成開口レーダ

【課題】複数のパラボラアンテナを設置する必要がなく、コンパクトなアンテナ系にできるため、小型航空機やヘリコプタ、リモコンで操縦可能な無人飛行機等にも搭載できるスプリットビーム方式合成開口レーダを提供する。
【解決手段】放射方向が僅かに異なり、ビームのメインローブが互いにオーバーラップしている2つのマイクロ波によるチャープ波を照射帯に向けて同時に照射する2つの一次放射器11,12を備えるとともに、照射帯からの反射波を2系統独立に受信するスプリットビーム送受信アンテナと、受信した2系統の反射波からの画像データの振幅差に基づき、静止物体の画像を除去して移動体の画像のみを抽出する手段と、抽出された移動体の画像に基づいて当該移動体の位置と速度を同定する手段とを備えたスプリットビーム方式合成開口レーダ。
(もっと読む)
目標追尾処理器及びそれに用いる誤差共分散行列の補正方法
【課題】 観測値の入力頻度が低下した場合、または観測値の入力が無くなった場合においても、誤差共分散が過度に大きくなったり、異常な値となったりすることを防止することが可能な目標追尾処理器を提供する。
【解決手段】 目標追尾処理器は、目標の位置を観測するセンサの観測値からその目標の位置、速度及び針路を状態変数として推定するカルマンフィルタを用いた目標追尾を行う。また、目標追尾処理器は、状態変数の分散を表す誤差共分散を補正する手段(ダミー作成起動部20、ダミー観測時刻作成部21、ダミー観測値作成部22)を有する。
(もっと読む)
検査レーダ装置
【課題】検出感度の向上したレーダ装置を提供することにある。
【解決手段】送信アンテナ101は、パルス発振器103が出力する振幅の異なる複数のパルスを波動に変換して被検査物に放射する。受信アンテナ102により受信された波動の反射波は、アナログ・ディジタル変換器106によりディジタル値に変換され、計算機201に取り込まれる。パルス幅制御器108は、パルス発振器103が出力する複数の振幅の異なるパルスに対して、それぞれ、異なるパルス幅のパルスを出力するように、パルス発振器103を調節する。
(もっと読む)
目標追尾装置
【課題】本発明は、正解航跡候補を含めた航跡候補をその状況に適切に生成保持することができ、探知状況によらず高い追尾精度を維持することができる目標追尾装置を提供する。
【解決手段】多次元相関行列生成部121は、センサ200の観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択する。多次元相関行列生成部121は、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する。多次元相関行列生成部121は、多次元相関行列の生成に際して、全航跡候補と相関する観測値が存在しない観測フレームである探知抜けフレームを多次元相関行列の観測フレームから除外し、探知抜けフレームよりも前の観測フレームを選択する。
(もっと読む)
動態監視システム
【課題】RFIDタグを利用した認証のセキュリティー性を向上することができる動態監視システムを提供する。
【解決手段】認証位置まで通じる複数の経路に沿って複数設けられた受信装置を介して、RFIDタグが送信するRFID用情報を読取るRFID読取り部と、受信装置の各々がRFID用情報を受信した時刻の差に基づいて、複数の経路の中からRFIDタグの移動軌跡を特定して蓄積する移動軌跡蓄積部と、RFID用情報が、複数の経路の中から選択された認証用軌跡情報とRFID用情報とは異なる個人認証用情報とに対応して予め記憶されている記憶部と、認証位置で個人認証用情報を用いて認証操作が行われた場合に、移動軌跡蓄積部に蓄積されたRFIDタグの移動軌跡と記憶部に記憶されている認証用軌跡情報との比較結果に基づいて、個人認証を行う認証部とを備えた。
(もっと読む)
移動目標検出装置
【課題】地上面を低速度で移動する移動目標をより確実に検出することができる移動目標検出装置を得る。
【解決手段】所定の観測時間差を有する第1の観測地点及び第2の観測地点における観測時期を設定する観測時期設定手段20と、アンテナから取得された2枚のSAR画像を格納するデータ格納部40a、40bと、データ格納部に格納された2枚のSAR画像間の位相差をそれぞれ算出する位相差算出手段50a、50bと、第1の観測地点の位相差から、移動目標の第1の位置および移動速度を特定するとともに、移動目標が移動速度で第2の観測地点まで移動した際の第2の位置を推定する移動目標位置推定手段60と、第1の位置における位相差と、第2の位置における位相差とが、ともに所定閾値よりも大きい場合に、移動目標を真の移動目標と判断する移動目標検出手段80とを備える。
(もっと読む)
合成開口レーダ装置
【課題】同期型DRAMを用いた合成開口レーダ装置で、効率よいデータ転送をし、画像再生の処理時間短縮、装置の軽量化、製品のコストダウンを図る。
【解決手段】SARセンサにより、高周波パルス信号を放射し、目標からの反射信号を受信してSAR画像の受信信号を得、同期型DRAMでSAR画像の受信信号を保持し、アドレス生成手段で同期型DRAM上の受信信号データのアドレス値を生成し、データアクセス手段で、アドレス生成手段により生成されたアドレス値に基づき同期型DRAMへの受信信号データの書き込みおよび同期型DRAMからの受信信号データの読み込みアクセスを行い、同期型DRAMに保持された受信信号をデータアクセス手段で読み込み、画像再生処理手段で画像を再生する。
(もっと読む)
レーダー画像処理装置
【課題】レーダー画像の相関値を利用して変化検出を行なう場合、有意な地上変化以外の要因によって相関値が低下することを抑え、有意な地上変化による相関値低下との区別を可能にする。
【解決手段】相関値算出部12で算出した相関値を、観測幾何補正部16で観測条件の相違による影響を補正し、データベース部17において、上記補正を行なった相関値と地理情報等の環境情報とを関連付けたデータベースを作成する。変化検出を行う際には、観測領域相関値推定部23において上記変化検出処理範囲の環境情報を元にデータベース用いて相関値を推定し、これを用いて変化域判定部24において、変化検出処理範囲内における変化域を検出する。
(もっと読む)
センサ配置評価装置
【課題】少ない計算量で、監視対象領域を目標が移動する過程でセンサ群によって高確率で探知可能か否かを評価可能なセンサ配置評価装置を得る。
【解決手段】目標状態ツリーを保持する目標状態探索状況保持手段109と、目標状態選択手段110と、目標状態生成手段115と、見逃し確率算出手段107と、累積見逃し確率算出手段108と、終了判定手段121とを備えている。目標状態ツリーは、目標の位置または向きに関する情報を含む目標状態と、目標の累積見逃し確率との対をノードとするツリー構造からなり、ツリー構造のルートノードは、初期目標状態に対応する。目標状態選択手段110は、目標状態ツリーにおいて、累積見逃し確率があらかじめ定めた閾値以上であるノードから、1つの目標状態を選択する。目標状態生成手段115は、選択した目標状態に基づき、その一定時間後の目標状態を新たに生成する。
(もっと読む)
センサネットワーク装置
【課題】通信量を抑制した、ネットワーク装置を提供。
【解決手段】状況推定部15は、接続されたそれぞれのセンサ装置100に関する推定規則を予めあるいは定期的に交換し共有保持し、推定規則に関するシミュレーションを行うことにより、状況情報とで判断した表示要求満足性を付与した表示要求送付情報、状況情報とで判断した優先度を付与した制御要求送付情報、また、センサ装置10の状況情報については変化が認められた場合にすべての送付先への状況送付情報を生成するよう動作し、表示要求管理部11は、表示要求送付情報を表示要求管理部に送るよう動作し、表示情報管理部14は、他装置から受信した表示要求送付情報の表示要求満足性で表示情報必要性が肯定されている場合にのみ、センサ装置100で生成された表示情報を要求元の他装置へ送付するよう動作し、制御要求管理部12は、制御要求送付情報を、対応する他装置の制御要求管理部へ送付する。
(もっと読む)
マイクロ波検出システム
【課題】 コンテンツとしての車両速度計測装置位置情報等の不正な利用を防止することができるマイクロ波検出器用ダウンロードアダプタを提供すること
【解決手段】
所定目標物または所定誤動作源からのマイクロ波を受信して警報を発生するマイクロ波検出器との間で通信を行なうとともに無線通信端末mtとの間で通信を行なう通信制御部21と、無線通信端末mtにより、サーバ30からダウンロードした所定目標物や所定誤動作源の位置情報とを一時記憶する一時記憶部23と、一時記憶部23に記憶した前記位置情報のダウンロードを制御するとともに、当該ダウンロードが終了した後に、当該ダウンロードした前記各位置情報を前記マイクロ波検出器に転送するデータ制御部22とを備える。
(もっと読む)
非接触入力処理システム、その制御方法及び制御プログラム
【課題】マウスによる動作入力を、マウスを用いずに簡易に実現可能な非接触入力処理システム、その制御方法及び制御プログラムを提供する。
【解決手段】データ処理装置130のICタグ識別情報取得手段131が、ICタグ110の識別情報を取得する。電界強度取得手段133は、ICタグ110の電界強度を識別情報に対応付けて取得する。適正座標演算手段137は、ICタグ110の識別情報と各ICタグ110の電界強度と、から3次元座標エリア上におけるICタグ110の適正座標を演算する。マウス動作識別手段138は、ICタグ110の識別情報と電界強度とその状態の維持時間と、の関係を、マウス情報登録手段135により登録された各種マウス動作情報と照合することで、マウス動作を識別する。
(もっと読む)
レーダ装置
【課題】MUSIC法やEsprit法などによって到来波数の推定を行うレーダ装置において、精度良く到来波数の推定が行えるようにする。
【解決手段】ビート信号に基づいて、ターゲットの距離および相対速度(もしくは方位)を求め、それらを履歴情報として記憶する。そして、記憶された履歴情報から、今回の到来波推定の際におけるターゲットの位置を予測し、この予測されるターゲットの位置からターゲットの複数が並ぶか否かを予測し、その予測結果に基づいて到来波の数の推定を行う。このように、前回のサイクルの際に得られたターゲットの履歴情報に基づいて、前回のサイクルの際に並走していなかったターゲット同士が今回のサイクルの際に並走するか否か、もしくは、前回のサイクルの際に並走していたターゲット同士が今回のサイクルの際に並走しなくなるか否かを予測して到来波数を修正する。これにより、より正確に到来波数を推定できる。
(もっと読む)
障害物検出装置
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
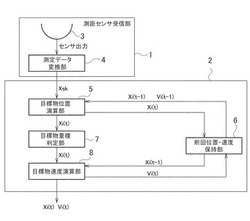
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
レーダ装置
【課題】安定した相関追尾が可能なレーダ装置を提供する。
【解決手段】FMCW方式のスイープ信号を送受信する送受信器20と、送受信器からの信号に基づき算出された目標の速度によって該目標を速度範囲毎にグルーピングする速度グルーピング部36と、前記速度グルーピング部によってグルーピングされた速度グループ毎に相関追尾を行う相関追尾部37を備えている。
(もっと読む)
二次監視レーダ
【課題】モードS機から送信される拡張スキッタを有効利用して航空機を監視する。
【解決手段】監視空域を飛行する航空機に質問信号を送信する送信手段122と、監視空域を飛行する航空機から送信された信号を受信する受信手段123と、受信手段が受信した信号から前記送信手段が送信した質問信号に応答する応答信号が検出されると、当該応答信号を解析する応答解析手段132b,133bと、受信手段が受信した信号から拡張スキッタが検出されると、当該拡張スキッタを解析するスキッタ解析手段132dとを備える。
(もっと読む)
受信波の相関行列算出装置及び受信波の相関行列算出方法、並びに波源方向推定装置及び波源位置推定装置
【課題】波源の帯域幅が狭い場合にも波源相互相関値を低減することができる受信波の相関行列算出装置を提供する。
【解決手段】受信波の相関行列算出装置は、アレーアンテナ24aにより電波を受信して相関行列を算出する。受信波の相関行列算出装置は、受信波の各周波数における方向行列を所定の周波数における方向行列へ変換し、所定の周波数における方向行列の位相を回転し、位相回転された方向行列を周波数平均して平均化された相関行列を算出する。
(もっと読む)
低減された減衰RF技術を使用する、オブジェクト追跡中のマルチパス緩和のための方法およびシステム
広範囲の無線周波数(RF)基準でオブジェクトを同定し、追跡し、および位置探知する方法およびシステム。方法およびシステムは、RF位置探知信号の伝搬損失と精度損失とを最小限にする、低周波帯域のVHFを含む、狭帯域幅レンジング信号を使用する。方法とシステムは、追跡、位置探知精度をさらに改善する、狭帯域幅レンジング信号マルチパス緩和プロセッサを含む。信号は、マスターユニットからタグへと送信される。信号移動時間は、記録され、マスターとタグの間の距離が計算される。方法とシステムは、長距離のRF狭帯域幅レンジング信号貫通と、狭帯域幅レンジング信号マルチパス緩和プロセッサと併用してVHF帯を使用することによる改善された精度と、の達成を可能にする。デジタル信号処理とソフトウェア定義無線の技術が使用される。無線機によって送受信された実際の波形は、ソフトウェアによって定義される。マスターユニットとタグの役割は、逆にすることができる。 (もっと読む)
レーダ装置空中線
【課題】機能用途の異なるレーダ装置で用いる空中線を共通化したレーダ装置空中線を得る。
【解決手段】 複数の移相器が直線状に配列された一次元フェイズドアレー空中線を構成し、レーダ装置本体からの制御信号に基づき、この一次元フェイズドアレー空中線を回動させてアレーの配列方向を仰角方向または方位方向に保持する機構を備えるとともに、配列の方向には高速での走査が可能な電子走査によるビーム走査を行いつつ、方位方向には機械走査または対象方位への駆動・停止を可能にすることによって、レーダ装置本体の備える機能に応じて、方位方向、及び仰角方向の走査モードを種々に組み合わせる。
(もっと読む)
341 - 360 / 1,245
[ Back to top ]