
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
261 - 280 / 1,245
目標物探知装置および目標物探知方法
【課題】目標物が停止したのか失探したのかを判別して、追尾の誤りを削減することを目的とする。
【解決手段】ドップラ効果を利用して目標物が探知するレーダ装置の監視領域を分割した複数の分割範囲ごとに、電波到達可能であるか否かを示す電波到達可否情報と、ドップラ効果が有るか無いかを示すドップラ情報を関連付けて記録し、最後に探知された目標物の追尾結果を示す追尾情報と今回探知した目標物の探知結果を示す探知情報を用いて、最後に探知した目標物と今回探知した目標物とを関連付け、追尾処理が中止された対象の最後に探知された目標物の追尾情報に含まれる位置情報を参照して、最後に探知された目標物が含まれる分割範囲を検知し、該分割範囲において電波到達可能か否かとドップラ効果の有無を判定して、最後に探知された目標物が停止したかを判定する目標物探知装置および目標物探知方法である。
(もっと読む)
画像処理装置、レーダ装置、画像処理方法および画像処理プログラム

【課題】表示に視覚的な違和感が生じないように代表位置を決定する手法を実現した画像処理装置を提供する。
【解決手段】画像処理部17は、画像メモリ16から入力した画像データとテンプレート画像データとのマッチングを行う。例えば、一致度が最も高いテンプレート画像データを選定する。各テンプレート画像データには、それぞれ位置データが定めれており、画像処理部17は、選定されたテンプレート画像データに対応付けられている位置データに基づいて、入力した画像データの代表点を設定する。
(もっと読む)
複合誘導装置及び複合誘導方法
【課題】パッシブアンテナ素子のレドームによる影響を軽減し、さらには広い周波数帯での測角を実現する。
【解決手段】飛しょう体における略円筒筐体先端の円形領域の中央に配置され、レドーム11を通じて飛しょう体の正面方向からの電波を受信する第1のパッシブアンテナ素子群A11〜A15と、第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部17−20と、第1のパッシブアンテナ素子群の周囲に配置され、レドームを通じて飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群12と、アクティブアンテナ素子群12の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部13〜15と、パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段16とを具備する。
(もっと読む)
レーダ装置、及び方位検出方法
【課題】異なるターゲットに対応する周波数スペクトルが重なった場合でも、各ターゲットの方位を正確に算出可能なレーダ装置に関する技術を提供することを課題とする。
【解決手段】送信波が静止ターゲットと移動ターゲットを含むターゲットで反射された反射波を少なくとも2つの受信アンテナの受信信号として受信し、送信信号と受信信号から生成されるビート信号のピーク周波数の位相差を算出し、この位相差に基づいてターゲットの方位を算出する。ターゲットの方位の算出は、方位算出部で算出された静止ターゲットの位相差を記憶領域に記憶しておき、複数のターゲットのピーク周波数が重なるか否かを予測し、記憶される位相差に基づいて、ピーク周波数が重なる際の静止ターゲットの予測位相差を算出し、算出された位相差と静止ターゲットの予測位相差に基づいて移動ターゲットの予測位相差を算出し、ターゲットの方位を算出する。
(もっと読む)
位置検出装置
【課題】無線タグと位置情報との関連付けを容易化するとともに、導入時や保守時にかかる負担を軽減することが可能な位置検出装置を提供する。
【解決手段】移動経路に沿って配置され、基準位置からの配置位置の変化量に応じて順次割り当てられた番号をタグIDとして記憶する複数の無線タグと、各区間の先頭に位置する無線タグのタグIDと、当該無線タグの前記基準位置からの距離と、各区間に配置された無線タグの総数とを関連付けたテーブル情報を記憶する記憶手段と、前記移動経路を移動する移動体に設けられ、当該移動体が存在する位置に配置された前記無線タグから当該無線タグのタグIDを読み取る読取手段と、前記テーブル情報に基づいて、前記読取手段が読み取ったタグIDが所属する区間での前記無線タグの配置間隔を算出する算出手段と、前記テーブル情報と前記配置間隔とに基づいて、前記移動体の現在位置を検出する位置検出手段と、を備える。
(もっと読む)
周波数変調レーダシステム内の干渉を抑制するためのシステムおよび方法
本発明は、第1のマイクロ波放射を放出するための放出器と、第1のマイクロ波放射から引き出される第2のマイクロ波放射を検出するための受信機と、放出器および受信機に接続された制御システムとを有するシステムに関している。第1のマイクロ波放射は、複数の時間ポイントで、これらの時間ポイントに割り当てられた異なる周波数で放出される。時間ポイントと周波数の相関は、ランダムまたは擬似ランダムである。別法または追加として、時間ポイントにおける放出または受信のための時間期間の長さもランダムまたは擬似ランダムである。本発明は、さらに、周波数変調レーダシステム内の干渉を抑制するための方法に関している。 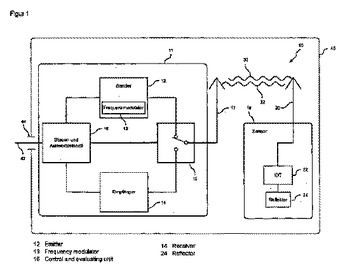 (もっと読む)
(もっと読む)
セルラー式移動無線測位システム
【課題】移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位する装置を安価に実現する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】ビームアンテナを利用した位置推定において、高精度に位置推定を行なうことを課題とする。
【解決手段】位置推定装置は、指向性アンテナから出力されるビームの方向を制御し、制御された方向での指向性アンテナから出力されるビームを第1周波数で出力する。また、位置推定装置は、出力されるビームを第1周波数で出力した後に、第1周波数とは異なる第2周波数で出力する。また、位置推定装置は、第1周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第2周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第1周波数及び第2周波数のビームで共通に取得されたIDを特定し、特定されたIDとビームの方向とを出力する。
(もっと読む)
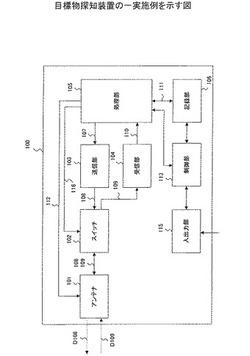
UWBセンサシステム及びリーダ装置
【課題】1つの受信系を用いて、リーダが、レーダの人体検知距離を数メートル程度確保しつつ、無線タグのIDを取得すること。
【解決手段】UWB送信部310は、IR-UWBのパルス系列を用いて周期的且つ間欠的であって、リーダ300に固有のユニークワードを示すUW信号を送信し、UWB受信部320は、タグ200のタグIDを示すID信号と、UW信号がタグ200を装着した人体で反射された人体エコーと、を受信し、タグID検出部340は、ID信号からタグ200のタグIDを検出し、相関受信部330は、受信信号の遅延プロファイルを算出し、2次元プロファイル推定部370は、遅延プロファイルを用いて遅延時間領域及びドップラシフト領域の2次元電力スペクトラムを算出し、測距・生体検知部380は、2次元の電力スペクトラムを用いて人体エコーを検出する。ここで、UWB送信部310は、タグ200のタグIDが検出された後に、UW信号を送信する。
(もっと読む)
レーダ装置及びレーダ信号処理方法
【課題】 妨害除去処理に際してメインローブに与える影響を低減する。
【解決手段】 アレーアンテナ部10は、レーダ信号を受信する。レーダ制御部70は、アレーアンテナ部10によるレーダ信号の受信を妨害する妨害電波の方向を特定する。ビーム形成部40は、アレーアンテナ部10によって受信されたレーダ信号から、所望の受信ビームを形成し、レーダ制御部70によって特定された方向に妨害除去のためのSLCビームを形成する。SLC処理部50は、ビーム形成部40によって形成されたSLCビームを用いて、受信ビームから妨害電波の影響を除去する。
(もっと読む)
測定装置
【課題】測定すべき測定情報を推定するときに、測定情報に生じる誤差に関する情報を使用者に提供可能な測定装置を提供する。
【解決手段】観測手段12によって受信した電波信号に基づいて、測定すべき測定情報、たとえば電波信号の到来方位、発信源までの距離または発信源の位置を推定手段13によって推定し、表示手段14によって表示する。このとき、推定手段13によって推定された物理量に含まれる誤差を表す誤差情報を最大誤差評価手段11によって求め、表示手段14によって表示する。最大誤差評価手段11は、たとえば、推定手段13による物理量の推定に用いた推定モデルからの実際の観測量の誤差であるモデル誤差によって推定量に生じる推定誤差の最大値を求め、表示手段14によって表示させる。
(もっと読む)
救難信号発振器
【課題】単純で無調整かつローコストな落水者の捜索方法とその救難信号発振器の実現を課題とする。
【解決手段】通常の航行機器 無線設備でホーミングできる落水者の方位探知用 トランスポンダーをマイクロ波の検波回路2と演算装置3 発振器4 応答アンテナ5を用いて構成し レーダー帯域ではなく無線通信装置に低周波での応答信号を送信する装置と、指差し操作によりレーダーPPIスコープ上で落水者方位を特定する救難信号発振器。
(もっと読む)
パッシブ型飛しょう体飛しょう制御装置および制御方法
【課題】TDOAとFDOAを観測し、目標の位置をパッシブに測位するパッシブ型飛しょう体において、測位精度の向上を図る。
【解決手段】既知の送信源から照射され目標に当たって散乱した散乱波と、既知の送信源から直接到来する直接波との両方を受信することでTDOAおよびFDOAを観測し、自らは電波を放射することなく目標を測位して自らの飛しょう経路を目標へと向かうように制御する飛しょう制御部(14)を備えたパッシブ型飛しょう体飛しょう制御装置であって、自機、送信源、目標の幾何学的配置からGDOPを演算するとともに、ISO−TDOAとISO−FDOAの直交度を推定し、現在の飛しょう体による測位誤差の定量的な判断指標を生成するGDOP演算部(18)をさらに備える。
(もっと読む)
衝突予測装置
【課題】従来に比して衝突の誤判定を低減した衝突予測装置を提供する。
【解決手段】車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、物体から反射された当該電磁波の反射波を受信することによって当該物体を検出する物体検出手段と、物体検出手段によって検出された物体が車両に衝突する可能性のある障害物であるか否か判定する障害物判定手段と、物体が障害物であると判定された場合、車両と当該障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、車両の車体が上下方向に振動しているか否かを判定する振動判定手段と、車両の車体が上下方向に振動していると判定された場合、衝突判定手段による衝突の危険性が高いとする判定を車両の車体が上下方向に振動していないと判定された場合に比べて抑制する判定抑制手段とを備える、衝突予測装置である。
(もっと読む)
電子キーシステムのキー位置判定装置
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
(もっと読む)
移動体管理装置
【課題】タグを有しない移動体を的確に判定することのできる移動体管理装置を得る。
【解決手段】ID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き移動体動線として作成する。移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線を移動体動線として作成する。動線比較部5は、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける。判定部6は、動線比較部5において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する。
(もっと読む)
レーダ情報表示装置
【課題】投影方法を切り替えてもレーダ情報や地図情報が表示されるまでの遅延を少なくすることができるようにする。
【解決手段】レーダ情報記憶バッファ210および地図情報記憶バッファ220は、それぞれが2つの記憶バッファ211(221),212(222)と、当該記憶バッファの一方を記憶情報の読み出し状態にした場合に他方を更新情報の書き込み状態となるように切り替えるバッファ切り替え手段213(223)とを有しており、座標変換手段240と画像生成手段230による表示画像生成処理は、所定の周期で、かつ当該周期内の一定の期間に割り当てて繰り返して行い、レーダ情報記憶バッファ210および地図情報記憶バッファ220の更新情報の書き込み処理は、所定の周期内の残りの期間に割り当てて任意の時期に行う。
(もっと読む)
信号処理装置、レーダ装置及び信号処理プログラム
【課題】サイドローブによる偽像を抑圧することができる信号処理装置を提供する。
【解決手段】レーダ指示機3は、物標存在領域検出部21と、過去スイープ蓄積部22と、偽像抑圧部23と、を備えている。物標存在領域検出部21は、物標が存在する領域を検出する。過去スイープ蓄積部22は、方位方向に連続したレーダエコーを取得可能である。偽像抑圧部23は、方位方向に連続したレーダエコーから得られる情報に基づいて、前記レーダエコーに含まれる偽像を抑圧する処理を行うことが可能である。そして、偽像抑圧部23は、物標が存在する領域のレーダエコーに対しては、それ以外の領域のレーダエコーに対する処理とは異なる処理を行っている。
(もっと読む)
障害物検出装置
【課題】近距離においても物標の位置を精度良く得る。
【解決手段】センサ2で物標を検出する障害物検出装置1において、センサ2により物標が検出されていた状態から該物標が検出できない状態となったときに、センサ2により物標が検出されていた状態のときの該物標の位置及び速度情報と、センサ2で物標を検出することができなくなったときからの経過時間と、から、センサ2により物標を検出できないときの該物標の位置を推定する推定手段83を備える。
(もっと読む)
レーダ装置
【課題】受信信号における偏波チャネル間のコヒーレンスが低下した場合であっても、低い演算負荷で高精度に目標を検出することができるレーダ装置を得る。
【解決手段】異なる偏波特性を有する2つのアンテナ4、5と、パルス信号をアンテナ4、5の一方に複数回連続して出力した後、他方に複数回連続して出力する偏波切り換え器2と、受信信号のドップラースペクトルを算出するドップラー処理手段10と、平均電力レンジ・ドップラーマップを生成する平均電力算出手段11と、平均全電力レンジ・ドップラーマップを生成する平均全電力算出手段12と、各注目セルの電力値を参照セルの平均電力で正規化するCFAR手段13と、電力値が閾値を超えるセルを検出する閾値処理手段14と、検出されたセルについての電力比を算出する電力比算出手段15と、電力比に基づいて、クラッタと目標との判別処理を実行する判別処理手段16とを備える。
(もっと読む)
261 - 280 / 1,245
[ Back to top ]