
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
221 - 240 / 1,245
レーダ装置
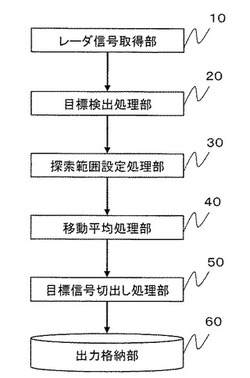
【課題】クラッタの比較的強い環境下で観測信号を取得した場合でも、高精度に目標信号を抽出することのできるレーダ装置を得る。
【解決手段】電波を送受信して観測信号を取得するレーダ信号取得部10と、観測信号に基づき、抽出対象となる目標の大きさのウィンドウを用いた移動平均処理により各レンジビンにおける平均値を算出する移動平均処理部40と、移動平均処理部40で算出した各レンジビンの平均値を比較し、目標信号が位置する領域を抽出する目標信号切出し処理部50と、目標信号切出し処理部50からの出力結果を格納する出力格納部60とを備えている。
(もっと読む)
区画線検出装置および区画線検出方法

【課題】電磁波を送受信した結果に基づき区画線の検出を行う装置において、検出精度を向上させる。
【解決手段】近距離スキャンの1ライン分の測定データ(強度データ,距離データ,スキャン角度)を読み込み、読み込んだ強度データ列および距離データ列のそれぞれを微分することで、微分強度データ列および微分距離データ列を求める(S110〜S120)。微分強度データ列において正レベル,負レベルが連続し且つヌルレベルに挟まれた領域を候補範囲として抽出し(S130)、その抽出した候補範囲の中から、微分距離データ列の極性が、候補範囲に対応する部位で正,負,正(第1スキャン領域の場合)、又は負,正,負(第1スキャン領域の場合)と変化するものを、区画線からの反射が得られた対象領域として抽出する(S140)。
(もっと読む)
物体変位監視装置、及び物体変位監視方法
【課題】物体の変位を精度の良く監視する物体変位監視装置、及び物体変位監視方法を提供することを課題とする。
【解決手段】物体変位監視装置は、互いに高さの異なる複数の反射板に照射されたレーダの反射波に基づき生成された測定データから、互いに高さの異なる複数の反射板からの反射波による領域データを抽出し、抽出された領域データを所定の範囲ごとにグループ化し、グループ化された領域データに基づき測定対象物の変位を監視する。
(もっと読む)
目標類別装置
【課題】 類別するクラス(トラック、戦車、小型機 等)が増えるに従って類別処理が複雑化するため類別確率(類別結果が正しい確率)が低下する。
【解決手段】 目標が存在する地形の種類毎に当該地形に存在する目標の目標データを予め格納した参照データベースとを備える。目標の存在する地形に応じて、この参照データベース内の目標データを変更することで類別を行う。これにより、クラス(戦車、トラック、小型船 等)が増えても類別処理が複雑化することを避け、類別確率の低下を防ぐことができる。
(もっと読む)
物体検出装置
【課題】簡易な方法で、自車両に搭載された検出装置の検出方向軸のズレの補正を自車両の走路環境に応じて行うことのできる物体検出装置を提供する。
【解決手段】物体検出装置は、上記車両の車両情報を取得する車両情報取得手段と、上記車両情報を用いて上記車両の進行方向を算出する進行方向算出手段と、上記進行方向と一致する方向に上記検出手段の検出方向を補正する補正手段と、道路情報および上記車両の位置情報を含むナビゲーション情報を取得するナビゲーション情報取得手段と、当該ナビゲーション情報に基づき上記車両の位置が予め定められた条件を満たす場合、上記補正手段が行う上記補正を禁止する禁止手段とを備える。
(もっと読む)
気象レーダ信号処理装置及びそのグランドクラッタ除去方法
【課題】MTI処理後のグランドクラッタの消え残りと気象エコーとを高精度に区別する。
【解決手段】MTI処理A1により、目標反射波受信信号のIQデータからグランドクラッタ成分を除去することで気象エコー成分を抽出する。続いて、スペクトル評価処理A2により、気象エコー成分から順次正規化したパルスペア合成ベクトルを求め、そのパルスペア合成ベクトルの総和の絶対値からスペクトルの平坦さを評価する評価指標を算出し、この評価指標に基づいてグランドクラッタの除去と気象エコーの保持を行う。最終的に、ノイズ除去処理A3により、処理A2の評価指標に対する振幅成分の電力値に対する閾値処理を行って孤立点を除去することでノイズを除去する。このようにしてスペクトルの平坦さを評価し、この評価指標に対する閾値処理によりグランドクラッタ除去を行う。
(もっと読む)
車載用パルスレーダ
【課題】簡易な構成で遅延時間を与えることで受信信号へのノイズ信号の混入を時間的に分離して高精度で対象物情報の検出が可能な車載用パルスレーダを提供する。
【解決手段】周波数変換器152でダウンコンバートされたベースバンド信号は、遅延回路153を通過したのち、基板間コネクタ103を介して信号処理部102に出力される。また、制御信号は、制御信号発生部162から基板間コネクタ103を介してスイッチ回路151に出力される。遅延回路153は、ベースバンド信号に所定の遅延時間を与えることで、制御信号が基板間コネクタ103を通過してからベースバンド信号が基板間コネクタ103を通過するまでの時間差を大きくしている。これにより、ベースバンド信号は、制御信号からの干渉を受けることがなくなる。
(もっと読む)
マルチラテレーションシステム、マルチラテレーション受信局の信号処理方法、及びその処理プログラム
【課題】複数の航空機の位置情報を抽出するマルチラテレーションシステムにあって、各モードA/C機からの応答情報を不規則に選択処理しシステム負荷の軽減を図ること。
【解決手段】航空機(目標物)が搭載するトラスポンダからのスキッタ信号若しくはSSR応答信号を受信する複数の受信局1,2,…と、この受信された各信号の到達時間差から目標物の三次元位置情報を算出し且つ目標物の識別情報を得る位置情報算出手段(センタ局)120とを備え、各受信局1,2,…は、受信したSSR応答信号を情報分析するSSR応答デコード手段12と、ここで得られたモードSスキッタ,モードS応答,及びモードA/C等のメッセージに編集してセンタ局へ出力するメッセージ生成手段13とを備え、モードA/Cを経時的に不規則に選択して前記メッセージ生成手段13に送り込むモードA/C信号間引手段14を設けたこと。
(もっと読む)
検知装置および検知プログラム
【課題】定常的に存在している物体の近傍に位置する対象物の検知精度を向上する。
【解決手段】検知装置は、レーダを用いて移動可能な対象物を検知する。検知装置は、取得部、背景算出部、および、判定部を備える。取得部は、レーダが検知物体から受信した受信電力値を取得する。背景算出部は、繰り返し同じ位置に検知される検知物体を表す背景物体からレーダが受信する背景電力値の強度の分布を算出する。判定部は、受信電力値の強度の分布が背景電力値の強度の分布と異なる場合、レーダは対象物を検知したと判定する。
(もっと読む)
走行車両台数計測装置及びプログラム
【課題】 1車線の道路上を走行した車両台数を正しく計測することが可能なドップラー方式の検出センサを用いた走行車両台数計測装置の提供。
【解決手段】 1車線上における任意の計測範囲内を走行中の車両に対し放射した送信波と、車両からの反射波との差分波を周波数分析することによって抽出される車両の速度と振幅値とを取得してそれらの時間変位を記録する。記録した車両速度と振幅値とに基づいて、前記計測範囲に車両が進入してから通過し終わるまでにかかる経過時間を確定し、当該確定した経過時間毎に車両台数をカウントする。すなわち、単に車両速度のみを用いて通過車両の台数をカウントするのではなく、車両速度に振幅値を組み合わせて用いて通過車両の台数をカウントする。これにより、計測範囲内における車両の移動態様を的確に把握して通過車両の台数をカウントすることが、ドップラー方式の検出センサを用いるだけでできるようになる。
(もっと読む)
距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
レーダ装置、物標速度検出方法、及び、物標速度検出プログラム
【課題】不定性を生じさせることなく、物標の相対速度を広範囲にわたって検出可能なレーダ装置を提供する。
【解決手段】船舶用レーダ装置は、信号発生部と、送信タイミング制御部と、相関処理部と、速度検出部と、を備える。信号発生部は、送信パルス信号を発生させる。送信タイミング制御部は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理部は、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
(もっと読む)
物体検出装置
【課題】物体の誤検知を抑制する。
【解決手段】物体検出装置10は、自車両からの所定角度範囲の検知領域を複数の垂直角度領域および水平角度領域に分割する。物体検出装置10は、複数の垂直角度領域毎に、複数の水平角度領域毎に向けて発信された電磁波に対応して検出された複数の反射点を、反射点の位置に基づき複数のセグメントに分類するセグメント生成部32と、所定位置範囲内に存在するセグメントからなり、かつ固有の物標を有する物標対象を生成する物標対象生成部33と、物体検出部37とを備える。物体検出部37は、物標対象生成部33によって生成された物標対象のうち、単一の垂直角度領域でのセグメントのみで構成された物標対象により物体を検知する。
(もっと読む)
追尾装置
【課題】背景画素の誤抽出を低減し、追尾目標の画像上の大きさや向きの変化に影響を受けない高精度の追尾装置を提供する。
【解決手段】観測センサで同時に観測された同一画角の距離画像と強度画像がフレーム単位で入力され、最新フレーム画像の追尾点情報を入力とし該追尾点の距離画像から得る3次元位置座標と強度画像から得る強度値を観測ベクトルとし追尾フィルタにより次フレームでの追尾目標の状態予測値を出力する追尾フィルタ装置と、前記追尾目標の状態予測値に基づく最新フレーム画像での残差2次形式、追尾予測位置との距離差分、追尾予測強度との強度差分により各画素が目標を構成する確からしさを表す目標画素指標を算出しさらにここから最新フレーム画像での目標を構成する目標領域を抽出し目標領域に含まれる画素から追尾フィルタ装置への新たな追尾点情報を算出して出力する目標検出装置を含む。
(もっと読む)
画像レーダ装置
【課題】従来、観測目標と一致する候補目標の3次元形状データや観測目標種類が不明の場合、クロスレンジ軸ベクトルの推定ができず、また、クロスレンジ軸ベクトルが一意に定まらず複数種類得られてしまう。
【解決手段】受信高周波信号の目標上の反射強度分布に関するレンジ方向と、クロスレンジ方向を共に高分解能化処理して生成されたレーダ画像上の主軸と高さ軸又は/及び横軸のレーダ画像における夫々の軸の傾きを全軸傾斜計測手段で算出し、画像レーダ装置から目標に向かう方向のレンジ軸単位ベクトルと主軸方向単位ベクトルと目標の高さ軸方向又は/及び目標の横軸方向の単位ベクトルを全軸方向推定手段で得て、レンジ軸単位ベクトルと主軸方向単位ベクトルと目標の高さ軸方向又は/及び目標の横軸方向の単位ベクトルと、レーダ画像上の主軸と高さ軸又は/及び横軸の傾きからクロスレンジ軸ベクトルを推定する。
(もっと読む)
追尾装置、追尾方法、及びコンピュータプログラム
【課題】飛翔体のトランスポンダーから送信されてきた応答信号を受信し、その電波強度を基に、アンテナ角を飛翔体に追尾させる追尾装置で、サンプリングレートを高速化させることなく、高精度追尾が可能にする。
【解決手段】制御装置21の座標演算器22で現時刻の飛翔体の位置座標を算出し、位置推定器23で次時刻の飛翔体の位置座標を推定し、角度算出器24で次時刻のアンテナの角度の推定値を算出している。そして、推定された次時刻でのアンテナの角度を目標値として、アンテナ31の向きを制御している。このように、本発明の第1の実施形態では、次時刻でのアンテナの角度の推定値を目標値として、アンテナ31の向きを制御しているため、サンプリングレートを高速化させることなく、高精度追尾が可能になる。
(もっと読む)
マイクロ波位置検知システムおよびマイクロ波を使用して位置を検知する方法
【課題】ターボ機械内の多数の対象部品の位置をコスト効率よく監視するマイクロ波位置検知システムを提供する。
【解決手段】マイクロ波位置検知システムは、それぞれが複数の位置の間を移動する複数の対象部品を備える。マイクロ波発生器は、マイクロ波周波数信号を発生させる。分割器は、マイクロ波周波数信号を受け取り、複数の位置検知信号に分割する。分割された位置検知信号は、対象部品のそれぞれの位置を求めるために、複数の対象部品に送られる。また、位置検知信号の各々を校正することもできる。一実施例において、第1および第2の周波が共通の導波路を通って伝送する。第1の周波は、校正信号を生成するために対象部品に到達する前に反射される。対象部品の位置を検知するのに使用される第2の信号は、第1の信号を使用して校正される。
(もっと読む)
車両検知装置および車両検知システム
【課題】レーダにより検知された車両が走行している車線を判別する。
【解決手段】車両検知装置は、複数の車線の各々に設置され、設置車線に隣接する車線を検知範囲に含むレーダからの情報を用いて車両を検知する。車両検知装置は、取得部、観測レーダ特定部、および、判定部を備える。取得部は、各レーダから、検知された対象物と対象物を検知したレーダの間の距離を表す検知距離、および、対象物の検知時刻を取得する。観測レーダ特定部は、第1のレーダにより検知された第1の対象物の検知距離と、第1のレーダの設置車線に隣接する車線に設置されている第2のレーダにより検出された第2の対象物の検知距離のうち、最も短い距離を観測した距離観測レーダを特定する。判定部は、第1の対象物と第2の対象物の間の距離が第1の閾値以下の場合に、距離観測レーダが設置されている車線を車両が走行していると判定する。
(もっと読む)
パルスレーダ装置、パルスレーダ装置の目標物検出方法及び検出処理プログラム
【課題】1方向のビーム走査に要する時間を短くすると共に、2次トリップエコーとの判別を誤ることなく確実に1次エコーを検出することができるパルスレーダ装置を提供する。
【解決手段】パルス位相設定器11によって基準変化量φ1でNパルス分の初期位相を発生させ、送信パルス発生器12によってN個の送信パルス列を発生・送信する。目標で反射したNパルス分の受信信号を1組として目標信号を検出する。同様にして基準変化量φ2ついても目標信号を検出する。初期位相と逆の位相で受信信号を補正し、補正後の受信信号の位相回転量を比較して2次トリップエコーを除去すると共に1次エコーを検出しその目標データを出力する。
(もっと読む)
車両位置探索システム
【課題】車載機器遠隔制御システムの本来の機能に制限を加えることなく、新たなセンサの追加を必要とすることもなく、車両位置探索システムを提供する。
【解決手段】携帯装置10は、無指向性アンテナ17及び指向性アンテナ18を備える。携帯装置10は、ユーザ入力装置11から指示信号が送られたとき、無指向性アンテナ17を用いて第1の車両探索信号を車載装置20に送信し、指向性アンテナ18を用いて第2の車両探索信号を車載装置20に送信する。車載装置20は、第1の車両探索信号の相関値と、第2の車両探索信号の相関値とを取得し、第1の車両探索信号の相関値と第2の車両探索信号の相関値との差がしきい値Aより大きいか否かを判断し、判断結果を携帯装置10に送信する。携帯装置10は、送信された判断結果をユーザ通知装置14に出力する。
(もっと読む)
221 - 240 / 1,245
[ Back to top ]