
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
201 - 220 / 1,245
レーダ情報処理装置及びレーダ情報処理プログラム
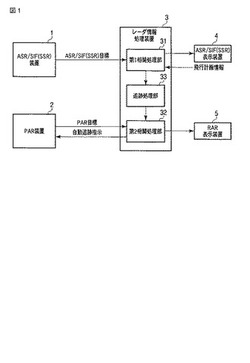
【課題】管制対象とする航空機目標を速やかに自動追跡に移行できるようにする。
【解決手段】レーダ情報処理装置3は、ASR/SIF(SSR)装置1から第1の更新レートで更新される第1のレーダ情報を受信し、PAR装置2から上記第1の更新レートより高い第2の更新レートで更新される第2のレーダ情報を受信し、第1のレーダ情報と航空機の飛行計画情報とを対応付ける第1の相関処理部31と、第1のレーダ情報をもとに第1の更新レートより短い周期で航空機の位置を予測する追跡処理部32と、追跡処理部32により予測された位置をもとに第1のレーダ情報と第2のレーダ情報とを対応付ける第2の相関処理部とを備える。
(もっと読む)
干渉レーダーの曖昧さを除去するために証拠グリッドを使用するためのシステムと方法

【課題】2つのレシーバだけを使用して干渉を用いた関連する曖昧さを除去する手段を提供する。
【解決手段】システムは、第1の空間領域の上の第1の検出信号および第2の空間領域の上の第2の検出信号を送信する干渉レーダーを含む。第2の領域は、第1の領域と同じように第1の小区域を有する。システムは、第1の占有値を証拠グリッドの第1のセルに割り当てる処理装置を更に含む。第1のセルは、第1の小区域を表し、第1の占有値は、オブジェクトが第1の小区域に存在するとして第1の検出信号により検出されたかどうか特徴づける。第1および第2の検出信号に基づいて、処理装置は、第1の占有値が第1の小区域のオブジェクトの存在を正確に特徴づける確率を計算し、確率計算に基づいて第1の小区域のデータ表現を生成する。
(もっと読む)
レーダ装置、アンテナ制御方法、及びプログラム
【課題】アンテナ開口の方位の変更動作を行う際に、消費電力を抑えつつ、追尾を継続する。
【解決手段】アンテナ開口の方位の変更のために空中線部1−3を駆動させると、空中線部1−2のビーム走査範囲の端から空中線部1−3のビーム走査範囲の端までの範囲が、走査されない範囲となる。空中駆動部1−3を駆動させている間、空中駆動部1−3の駆動によって発生する走査されない範囲をカバーし、かつ空中駆動部1−2、1−3同士のビームの走査範囲が重複しないように、空中駆動部1−2、1−3のそれぞれのビームの走査範囲を逐次変更する。
(もっと読む)
二次監視レーダ
【課題】オールコール期間にモードS応答の多重検出が発生した場合に信号の適否を判定して航空機の捕捉に有効に利用する。
【解決手段】候補機リストを記憶する候補機リスト記憶部135hと、受信手段がオールコール期間に受信した応答信号が含む航空機のモードSアドレスが、候補機リストに含まれる候補機のモードSアドレスと一致するか否かを判定するアドレス判定手段135cと、アドレス判定手段で応答信号が含む航空機のモードSアドレスと候補機のモードSアドレスとが一致すると判定されると、応答信号の受信タイミングが、候補機リストで候補機のモードSアドレスと関連付けられる相関範囲に含まれるか否かを判定する相関判定手段135dと、相関判定手段で応答信号の受信タイミングが相関範囲に含まれると判定されると、航空機のモードSアドレスを追加してロールコール捕捉対象リストを更新する更新手段135fとを備える。
(もっと読む)
レーダ装置
【課題】受信信号の組合せの問題を解き複数目標それぞれについて高精度な測位、測速処理を実現するレーダ装置を提供する。
【解決手段】電波の放射を行う送信部100と、異なる観測点に位置し前記送信部の放射電波の複数の目標での反射電波をそれぞれ受信し、各目標に関する受信時刻とドップラ周波数を観測するための時刻・ドップラ周波数用センサTDSおよび各目標の方位を観測するための測角センサASをそれぞれ有する複数の受信部200,300と、前記各受信部で観測された受信時刻、ドップラ周波数および測角値から目標の位置ベクトルおよび速度ベクトルを推定して前記複数目標の位置と速度を求める第1の手段を含む測位・測速演算部Cと、を備えた。
(もっと読む)
拡張現実のためのブロードバンドパッシブ追跡
それぞれが周囲の放送ソースからの電磁波(たとえば、無線周波数「RF」信号)を感知する能力を有するいくつかのパッシブ受信機を使用することができるブロードバンドパッシブセンシングおよび追跡システムに関する技術が、全般的に説明される。各パッシブ受信機は、1つまたは複数のアンテナによって感知するように構成され得る。異なる位置の複数の受信機が、関心のあるシーンの協調した追跡を行うように構成されたブロードバンドセンシングネットワークを形成するために利用され得る。一部の例によれば、ビームフォーミングアルゴリズムが、物体を測位および追跡するためにパッシブ受信機によって形成されたアンテナアレーを利用するブロードバンドセンシングネットワークに適用され得る。 (もっと読む)
レーダ装置、目標類別装置及び目標類別プログラム
【課題】ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することが可能なレーダ装置、目標類別装置及び目標類別プログラムを提供する。
【解決手段】特徴点設定部531は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。そして、類似度判定部533により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、算出した類似度に基づいた目標形状情報を選択する。
(もっと読む)
角速度推定装置及びコンピュータプログラム及び角速度推定方法
【課題】移動体の角速度を精度よく推定する。
【解決手段】周辺物体観測装置811(レーダ)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。相対位置取得部211は、周辺物体観測装置811が観測した観測結果を取得する。静止物体判定部220(停止物識別部)は、周辺物体観測装置811が相対位置を観測した物体が静止しているか否かを判定する。物体相関部230(停止物用追尾部)は、周辺物体観測装置811が観測した複数の相対位置のなかから、同一の物体について周辺物体観測装置811が観測した複数の相対位置を判定する。角速度推定部(状態推定部240、軌道推定部)は、移動体の角速度を推定する。
(もっと読む)
先行車検知装置
【課題】継続して存在する先行車が一時的に先行車と認識できなくなった場合に、その車両を先行車として早期に再認識することが可能な先行車検知装置の提供。
【解決手段】ECU5は、物体検知センサ2が今回検出した検出物体が前回よりも以前に検出された既検出の物体と同一であると推定した場合、その既検出の先行車の先行車適合情報を今回検出した物体の先行車適合情報として設定する引継ぎ処理を実行し、引き継がれた先行車適合情報に基づいて先行車の認定を行う。
(もっと読む)
先行車検出装置
【課題】2WS基準システムまたは4WS基準システムにおけるオフセット値に対して、さらに自車に適合する差分量を加算することによって、カーブ路における自車線上の先行車を精度よく検出できる先行車検出装置を提供する。
【解決手段】本発明の先行車検出装置は、自車の車両情報に基づいて当該自車が2WS車か4WS車かを判定する車両判定手段と、自車の前方にある物標の横位置情報を取得する横位置情報取得手段と、2WS車または4WS車に応じて横位置情報を自車のカーブ路における車体スリップ角が0度である直線走行方向基準の横位置情報に換算するオフセット値を算出するオフセット値算出手段と、オフセット値に基づいて横位置情報を直線走行方向基準の横位置情報に換算する直線走行方向基準換算手段と、直線走行方向基準の横位置情報に基づいて自車の前方にある物標が自車の前方にある先行車であるか否かを判定する先行車判定手段とを備える。
(もっと読む)
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
パッシブレーダシステムおよびパッシブレーダ方法
【課題】長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高める。
【解決手段】散乱波を受信して時系列データを生成する第1の受信系と、直接波を受信して時系列データを生成する第2の受信系と、両時系列データに基づく相互相関を演算し、移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定する相互相関演算手段(16)と、観測情報と測角値情報とを用いて、移動目標の位置を得る目標標定手段(17)とを備えるパッシブレーダ装置(10)を異なる位置に複数台配置し、各パッシブレーダ装置は、相互の観測情報を送受信する通信手段(18)と、すべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、移動目標の瞬時速度ベクトルを推定する瞬時速度ベクトル推定手段(19)とをさらに備える。
(もっと読む)
衝突予測装置
【課題】自車の前方に検出されたターゲットの自車に対する相対位置に応じて、当該ターゲットが自車の左側を通過するか、または右側を通過するかを予測し、自車とターゲットとの衝突可能性を適切に推定する衝突予測装置を提供する。
【解決手段】本発明の衝突予測装置は、自車の前方にターゲットを検出するターゲット検出手段と、ターゲットの自車に対する相対位置を算出する相対位置算出手段と、当該相対位置に基づいて、ターゲットが、自車の左側を通過するか、または右側を通過するかを示す通過予測情報を設定する通過予測情報設定手段と、相対位置の変化を監視する相対位置監視手段と、相対位置の変化に基づいて、通過予測情報設定手段によって設定された通過予測情報を変更する通過予測情報変更手段と、通過予測情報に基づいて、自車とターゲットとの衝突可能性を推定する衝突可能性推定手段とを備える。
(もっと読む)
レーダ装置
【課題】装置構成の複雑化や大規模化を招くことなく、目標の移動によるドップラ偏移がある場合にもレンジサイドローブの増大(劣化)の影響を低減するレーダ装置を得る。
【解決手段】レーダ装置は、相互相関処理の結果からピーク位置を検出するピーク検出器と、該ピーク位置の両側の第1サイドローブの位置を検出する第1サイドローブ検出器と、上記両側に検出された第1サイドローブの振幅値を比較するとともに振幅値の小さい上記第1サイドローブ側のデータを切り出す第1サイドローブ比較器と、アップチャープを送信したときに切り出した上記データとダウンチャープを送信したときに切り出した上記データを合成するデータ合成器と、データ合成後の振幅データから所定閾値以上の値を持つ位置を検出する信号検出器と、上記検出された位置を距離に変換する測距器と、を備えた。
(もっと読む)
目標検出装置及びコンピュータプログラム及び目標検出方法
【課題】少ない計算量で、目標と背景とを容易に区別できる評価値を算出することにより、目標の検出を容易にし、誤検出を減らす。
【解決手段】合計領域選択部132は、注目画素を通る複数の直線それぞれについて、複数の合計領域画素を選択する。直線判定部135は、上記複数の直線のうちから、合計領域選択部132が選択した複数の画素の輝度の合計または平均が最も大きい直線を判定する。背景領域選択部136は、注目画素を基準として、直線判定部136が判定した直線に対して略垂直な方向に位置する画素のなかから、複数の背景領域画素を選択する。目標判定部140は、注目画素の輝度と、複数の背景領域画素の輝度とに基づいて、注目画素が、目標画素であるか否かを判定する。
(もっと読む)
先行車検出装置
【課題】従来に比して正確に先行車の位置を検出可能な先行車検出装置を提供する。
【解決手段】自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
(もっと読む)
船舶識別装置
【課題】大規模な処理装置等を実装することなく、他の船舶に成りすましている不審船を検出することができるとともに、精度よく船舶の個体識別を行うことができるようにする。
【解決手段】信号特性照合部17により信号特性が合致していると判定された場合、AIS受信機14により受信されたAIS信号を発信しているAIS装置が搭載されている船舶については利用者IDに係る船舶であると判別し、信号特性照合部17により信号特性が合致していないと判定された場合、あるいは、その利用者IDがデータベース15に登録されていない場合、上記AIS装置が搭載されている船舶については不審船であると判別する。
(もっと読む)
追尾装置
【課題】大目標と小目標との観測値の取り合いによる追尾性能の劣化を回避し、高精度の航跡を生成可能な追尾装置を得る。
【解決手段】センサ10と、位置相関マトリクスを生成する位置相関処理部20と、セル数相関マトリクスを生成するセル数相関処理部30と、位置相関マトリクスおよびセル数相関マトリクスを用いて相関調停結果を生成する相関調停処理部40と、相関調停結果を用いて観測値クラスタを生成する位置クラスタリング処理部50と、統合セル数観測値を監視する統合セル数観測値監視処理部 60と、カルマンフィルタにより統合セル数推定値および更新後の統合セル数予測値を生成する統合セル数更新予測処理部70と、カルマンフィルタにより航跡の位置速度予測値および位置速度推定値を生成する位置速度更新予測処理部80と、遅延処理部90と、表示処理部100と、を備える。
(もっと読む)
区画線検出装置および区画線検出方法
【課題】電磁波を送受信した結果に基づき区画線の検出を行う装置において、検出精度を向上させる。
【解決手段】近距離スキャンの1ライン分の測定データ(強度データ,距離データ,スキャン角度)を読み込み、読み込んだ強度データ列および距離データ列のそれぞれを微分することで、微分強度データ列および微分距離データ列を求める(S110〜S120)。微分強度データ列において正レベル,負レベルが連続し且つヌルレベルに挟まれた領域を候補範囲として抽出し(S130)、その抽出した候補範囲の中から、微分距離データ列の極性が、候補範囲に対応する部位で正,負,正(第1スキャン領域の場合)、又は負,正,負(第1スキャン領域の場合)と変化するものを、区画線からの反射が得られた対象領域として抽出する(S140)。
(もっと読む)
予測装置及び予測システム及びコンピュータプログラム及び予測方法
【課題】観測対象の将来の位置を高い精度で予測する。
【解決手段】観測装置810(位置観測装置)は、移動体(観測対象)の位置を観測する。ジャイロセンサ820(角速度観測装置)は、移動体の角速度を観測する。バイアス補正部141(角速度誤差推定装置)は、観測装置810が観測した位置に基づいて、ジャイロセンサ820が観測した角速度の誤差を推定する。バイアス補正部141(角速度補正装置)は、推定した誤差に基づいて、ジャイロセンサ820が観測した角速度を補正する。運動状態外挿部180(予測位置算出装置)は、バイアス補正部141が補正した角速度に基づいて、移動体の将来の位置を予測する。
(もっと読む)
201 - 220 / 1,245
[ Back to top ]