
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
281 - 300 / 1,245
障害物検出装置
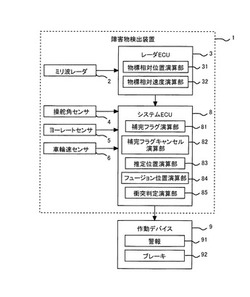
【課題】近距離においても物標の位置を精度良く得る。
【解決手段】センサ2で物標を検出する障害物検出装置1において、センサ2により物標が検出されていた状態から該物標が検出できない状態となったときに、センサ2により物標が検出されていた状態のときの該物標の位置及び速度情報と、センサ2で物標を検出することができなくなったときからの経過時間と、から、センサ2により物標を検出できないときの該物標の位置を推定する推定手段83を備える。
(もっと読む)
レーダ装置

【課題】受信信号における偏波チャネル間のコヒーレンスが低下した場合であっても、低い演算負荷で高精度に目標を検出することができるレーダ装置を得る。
【解決手段】異なる偏波特性を有する2つのアンテナ4、5と、パルス信号をアンテナ4、5の一方に複数回連続して出力した後、他方に複数回連続して出力する偏波切り換え器2と、受信信号のドップラースペクトルを算出するドップラー処理手段10と、平均電力レンジ・ドップラーマップを生成する平均電力算出手段11と、平均全電力レンジ・ドップラーマップを生成する平均全電力算出手段12と、各注目セルの電力値を参照セルの平均電力で正規化するCFAR手段13と、電力値が閾値を超えるセルを検出する閾値処理手段14と、検出されたセルについての電力比を算出する電力比算出手段15と、電力比に基づいて、クラッタと目標との判別処理を実行する判別処理手段16とを備える。
(もっと読む)
物体検出装置、物体検出装置を備えた車両の安全システム
【課題】上下方向の分解能が所定レベルに満たないレーダによって検出された静止物体が車両の走行にとっての障害物であるか否かを精度良く判定可能な物体検出装置を提供する。
【解決手段】レーダ部10と、レーダ部10により自車両の前方に存在する絶対速度が所定値未満の物体を静止物体として検出する静止物体検出部20と、自車両の前方に存在する絶対速度が所定値以上の物体を移動物体として検出する移動物体検出部30と、静止物体の検出位置の周囲に、その範囲に存在する移動物体は該静止物体に衝突することを回避不可能又は該静止物体に既に衝突したと推定できるように定められる所定の探索範囲を設定する設定部40と、移動物体の検出結果のうちに検出位置が前記探索範囲に入る検出結果が存在する場合、前記検出された静止物体は自車両の走行にとって障害とならない非障害物であると判定する判定部50と、を備える。
(もっと読む)
機械の内部室の監視システム
機械(2)の内部室に対する監視システム(20)は内部室(6)にレーダービーム(28)を入射するレーダー源(26)、内部室(6)で反射するレーダービーム(32)を受信しこのビームを受信信号(36)として出力するレーダー受信機(34)、受信信号(36)からの実際値シグネチャ(40a)を検出しこれを記憶されている機械(2)の無欠陥を表わす設定値シグネチャ(40b)と比較するための制御・評価ユニット(38)、実際値シグネチャ(40a)の設定値シグネチャ(40b)からの偏倚が許容尺度(44)を越える時に欠陥信号(46、52a、b)を出力するための出力ユニット(42)を備える。 (もっと読む)
自動追尾レーダ装置および自動追尾方法
【課題】雑音帯域幅の狭い追尾ループでの追尾を可能とし、追尾限界となるS/N比を改善することが可能な自動追尾レーダ装置を提供する。
【解決手段】ロケットやスペースデブリ等の飛翔体を自動追尾する自動追尾レーダ装置として、前記飛翔体を初期捕捉して、自動追尾モードに移行した以降において、アンテナ指向追尾系ループのアンテナ指向誤差検出器16、積分器17および距離追尾系ループの距離誤差検出器23、積分器24にて検出されたアンテナ指向誤差および距離誤差に基づき、アンテナ追尾ループフィルタ18および距離追尾ループフィルタ25それぞれにて生成されるアンテナ指向角度の制御情報および受信タイミングの制御情報を、予見情報(角速度、各加速度)加算器27および予見情報(速度、加速度)加算器26にて、前記飛翔体の軌道予測値、他のレーダ装置の追跡情報または過去の追跡データに基づく予測値である予見情報を用いてさらに補正する。
(もっと読む)
レーダ情報処理システム及びレーダ情報処理方法
【課題】複数のレーダ装置の受信信号から検出された目標に関する情報を正確に同期表示させること。
【解決手段】第1レーダ装置1及び第2レーダ装置2は、空中線11、21を同一周期で回転させてレーダパルスを送受信して、目標検出部13、23により目標を検出する。データ処理装置3は、第1レーダ装置1及び第2レーダ装置2により検出された複数の目標情報を同期させて出力する。第1レーダ装置1及び第2レーダ装置2は、目標検出処理前後の方位値を目標情報に付加してデータ処理装置3に出力し、データ処理装置3は、目標検出処理前後の方位値をもとに複数の目標情報を基準値に合わせて遅延させる。
(もっと読む)
マイクロ波イメージングシステム
【課題】超短パルスの反射波信号における物体表面での反射波成分を除去し、マスキングされていた検出対象物からの反射波成分を確実に取得して、物体内の検出対象物の状況を適切に画像化して評価可能とするマイクロ波イメージングシステムを提供する。
【解決手段】超短パルスの周波数帯域内に、検出対象物からの反射波成分が物体内を十分透過できる第一の周波数範囲と、同じ反射波成分でも透過性が低下する第二の周波数範囲を設定し、各周波数範囲に対応する反射波の各信号成分を取得して、第一の周波数範囲に対応する第一の信号成分から、第二の周波数範囲に対応する第二の信号成分を差引き、物体表面での反射波成分を打消すことから、効率よく物体表面での反射波成分を取除いて、第一の信号成分での検出対象物からの反射波成分を相対的に強調でき、画像再構成で検出対象物の画像化を精度よく実行可能となり、得られた画像から検出対象物を適切に検出できる。
(もっと読む)
航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラム
【課題】受信局で受信される信号のみでモードA応答かモードC応答かが判別可能な航空機位置測定システムを提供する。
【解決手段】位置情報処理手段(データ処理部30)では、応答信号種類判別手段(受信情報収集部31、信号抽出記録部34、モードC信号変換部35、モードC信号種類判定部36、モードA信号変換部37、モードA信号種類判定部38)により、各受信局21,22,…,25で受信された応答信号のビット列が気圧高度情報(モードCコード)に変換されると共に、同気圧高度情報と幾何学的高度情報とが比較され、この比較結果に基づいて、上記応答信号がモードA信号に対応するモードA応答か上記モードC信号に対応するモードC応答かが判別される。
(もっと読む)
画像処理装置及び画像処理方法
【課題】
レーダ画像と、レーダ画像に真航跡処理が施された真航跡画像について、静止物標に関する外部情報を取得することなく、エコーの揺らぎによる影響を抑制した上で静止物標を除去する画像処理装置及び画像処理方法を提供する。
【解決手段】
レーダ信号処理の下で画像を生成する画像処理装置であって、レーダ画像と、前記レーダ画像に真航跡処理が施された真航跡画像との積集合として前記画像を得る演算手段を備えることを特徴とする。また、前記レーダ画像と前記真航跡画像とが二値化され、かつ両者の論理積が前記積集合として求められることを特徴とする。
(もっと読む)
レーダ信号処理装置
【課題】気象エコーのドップラ速度が小さい場合でも、気象エコーの減衰を招くことなく、不要な地形エコーのみを除去可能なレーダ信号処理装置を得る。
【解決手段】時刻t1、t2での観測データDt1、Dt2を格納する観測データ格納手段1a、1bと、観測データDt1、Dt2からドップラ速度V1、V2を算出するドップラ速度算出手段2a、2bと、ドップラ速度V1、V2からドップラ0分布R1、R2を作成するドップラ0分布作成手段3a、3bと、ドップラ0分布R1、R2から補正エコー分布Rcを作成する補正エコー分布作成手段4と、観測データDt2に対して通常のクラッタ除去処理を行い、クラッタ除去後の観測データDt2’を生成するクラッタ除去手段5と、観測データDt2とクラッタ除去後の観測データDt2’と補正エコー分布Rcとを合成して補償観測データDcを取得するエコー補償手段6とを備えている。
(もっと読む)
建物内の検知対象の位置検知、行動認知システム
【課題】 建物内で移動する検知対象(人、物)の位置検知、行動認知が行え、必要に応じて検知対象に対して情報アシストを行えるシステムを提供する。
【解決手段】 天井版を格子状に取り付けたグリッド天井5を有する建物のフロア1内において、フロア1全体を検知範囲とする広域センサ15と、区画したゾーン間を通過する箇所に配置されたゲートセンサ16と、各ゾーン内の詳細検知可能にゾーン内に配置されたスポットセンサ17からなる検知手段を、グリッド天井5の天井板ごとに設ける。この検知手段を有する天井板を、グリッド天井5のレイアウトに応じて所定位置に配置する。各位置に配置された検知手段15,16,17により、検知対象者あるいは検知対象物の位置検知や行動認知を、段階的な精度で行える。さらに必要な情報を検知対象者に伝えることもできる。
(もっと読む)
自律移動支援システムとその制御方法
【課題】移動端末あるいは基準局から発信する無線信号を、複数の中継手段によって中継しあるいは再発信し、位置特定手段によって受信することで、前記移動端末の位置を高精度で特定できる自律移動支援システムを提供する。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
(もっと読む)
レーダ装置
【課題】近距離探知と遠距離探知とを実現可能であり、かつ、装置全体の小型化、簡単化及び低コスト化を実現することが可能なレーダ装置を提供する。
【解決手段】レーダ装置が近距離探知を行う場合には、信号処理装置10からの制御信号に従い、近距離探知時の受信信号を前段受信処理部51の低利得回路を介して後段受信処理部52へ導出する。また、レーダ装置が遠距離探知を行う場合には、信号処理装置10からの制御信号に従い、遠距離探知時の受信信号を前段受信処理部51の高利得回路を介して後段受信処理部52へ導出する。
(もっと読む)
シミュレータ
【課題】信号の輻輳、輻輳、フルーツ干渉等の発生時における二次監視レーダ及びSIF装置の動作を検証する。
【解決手段】対象範囲に検証の対象として所定時刻に存在が想定される機体の位置と、当該機体が応答する信号の種別と、当該機体の送信信号の情報を関連付ける機体データを記憶する機体データ記憶部13eと、動作を検証する装置が機体に送信した所定形式の信号を入力すると、機体データから、入力した信号の送信対象である機体の位置及び信号の種別と関連付けられる送信信号の情報を検索する機体検索手段13fと、機体データから検索された送信信号の内容を合成して模擬信号を生成する応答発生手段13gとを備える。
(もっと読む)
レーダ装置
【課題】ターゲットからの応答波の周期とフーリエ変換の周期とを一致させ、ターゲットの検出性能を向上する。
【解決手段】送信回路部5と受信回路部6との間に設けた同期回路部7のパルスウィンドウ同期回路7bでパルス生成回路5cからの送信パルスの送信時刻を取得し、送信パルスを生成するタイミングで直並列変換回路6cからFFT回路6dへのサンプリングデータの供給を開始させる。FFTの窓の終了時刻は、窓の開始時刻から送信パルスの周期分だけ経過した時刻とし、この窓の時間内で、FFT用のサンプルデータを取得し、受信波形を時間軸のデータから周波数軸のデータに変換する。これにより、ターゲットからの応答波の周期とFFTの周期とを一致させ、波形のゆがみを生じることなく生データを周波数領域へ変換することができ、認識性能や距離分解能等のレーダ性能を向上させることができる。
(もっと読む)
物体検出装置
【課題】カメラとレーダ等の複数のセンサを用いて物体を検出する物体検出装置において、複数のセンサから得られる情報を利用して検出精度を向上する。
【解決手段】光、電波、超音波の少なくとも一つの信号により物体を計測する少なくとも二つの計測部と、該計測部から得られる出力信号を処理する処理部2を具備する物体検出装置1において、前記少なくとも二つの計測部は、少なくとも二つの互いに異なる計測原理で構成される計測部であって、前記複数の計測部から得られる複数の出力信号を、共通の処理系のメモリに格納する取込手段を具備し、前記出力信号を、前記複数の計測部から得られる出力信号を共通の処理部2で処理する。
(もっと読む)
物標探知装置、物標探知方法、および物標探知プログラム
【課題】より正確なスキャン相関処理を行える物標探知装置を実現する。
【解決手段】物標探知装置100の相関処理部6は、スイープメモリ2に記憶された極座標系のエコーデータと、読出用メモリ70Bにて極座標系で記憶された前回スキャンのスキャン相関処理後記憶データとを、スキャン相関処理する。この際、アドレス決定部5は、アンテナ回転情報取得部3からのアンテナ回転情報と位置検出部4からの位置情報および船首方位とを用いて、スイープメモリ2からのエコーデータと、読出用メモリ70Bからのスキャン相関処理後記憶データとの座標系を一致させるように、読出アドレスを設定して、読出用メモリ70Bへ与える。書込用メモリ70Aは、アドレス決定部5により今回スキャンの基準タイミングの座標系で設定された書込アドレスに準じて、相関処理部6からのスキャン相関処理後データを記憶する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾において、従来のウィンドウを用いた場合に発生する目標の乗り移り、ロストといった問題を解消する。
【解決手段】あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行い、被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する。
(もっと読む)
無線センサ装置
【課題】複数のアンテナ間で互いの無線波が干渉することなくアンテナ間のアイソレーションを確保することができ、装置の小型化が図れると共に、発振器に要求されるピークパワーを半減できること。
【解決手段】無線センサ装置10は、アンテナA11,A12に信号発生回路11で生成されるパルス信号を給電して無線波を放射する場合、先のパルス信号がアンテナA11に給電されると同時にミキサ回路15aへ供給された後、当該アンテナA11及びミキサ回路15aに与えた先のパルス信号のパルス幅と重複しない近接タイミングで次のパルス信号がアンテナA12に給電されると同時にミキサ回路15bへ供給されるように、信号発生回路11の動作タイミング及び当該信号発生回路11からアンテナA11,A12までの経路を制御するものである。
(もっと読む)
位相情報を用いたサブミリ波レーダー
サブミリ波長アクティブレーダーシステム(10、20、30)のための信号処理装置(30)は、レーダーシステムによって受信されダウンコンバートされた信号を処理する。このダウンコンバート信号は、時変振幅とコンテンツに依存する周期的成分を有する位相成分とを有する視野中の所定のピクセルに対応する。コンテンツに関する情報は、周期的成分から識別される。振幅のみよりも位相を使用することによって、ダウンコンバート信号中に追加の情報が存在する。位相は、振幅のみよりも、オブジェクト、バックグラウンド及び大気条件のような、コンテンツ中の変化により敏感である。位相情報は、周期的成分が保持されることを可能とする。この周期的成分は、コンテンツフラター、サブミリ波定常波における変化、および、もし表面層が複数の半波長の厚さを有している場合、サブミリ波放射の受信された反射中における干渉縞に原因して、コンテンツに特有であり得る。 (もっと読む)
281 - 300 / 1,245
[ Back to top ]