
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
241 - 260 / 1,245
携帯機検知システム
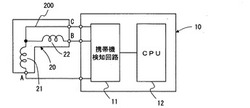
【課題】比較的簡素な構成で、応答性よく携帯機の位置を検知することができる携帯機検知システムを提供する。
【解決手段】車両の進行方向を長手方向とする第1エレメント21と、車両の進行方向及び鉛直方向に垂直な方向を長手方向とし、第1エレメントに電気的に直列接続された第2エレメント22と、第1エレメント21と第2エレメント22の接続点に一端が接続された迂回配線200とを含むアンテナ20と、第1エレメント21に電力を供給する第1電力供給状態、第2エレメント22に電力を供給する第2電力供給状態、第1エレメント21及び第2エレメント22に電力を供給する第3電力供給状態の、3つの電力供給状態を切り換えると共に、電力供給状態を切り換えた際の携帯機からの応答信号に基づいて携帯機の位置を検知する携帯機検知手段(携帯機検知回路11、CPU12)を備える。
(もっと読む)
物標認識装置

【課題】レーダがオフセット搭載されている場合に、自車両に接近する物標が衝突しないと誤判断するのを防止して物標検出精度を向上する。
【解決手段】衝突判定回避処理部8により、自車両1と物標200との距離がレーダ5の水平方向の検知角と搭載位置のオフセット量とに基づいて設定された所定距離以内になったか否かを判定し、所定距離以内に物標200が接近したときに、物標200が近づくにつれて略自車両1の車幅に設定される衝突判定領域を前記検知角に応じてレーダ5の搭載位置側へ拡大修正する。
(もっと読む)
車両ドライバ支援装置およびレーダ装置操作方法
運転支援装置
【課題】自車両にオフセット搭載されたレーダが接近した片側の物標を見失ったときに、レーダの物標位置に基づく衝突可能性の誤判断を防止して物標間のすり抜け等が無用な運転支援なく行なえるようにする。
【解決手段】例えば左右の路肩のポールや自転車、ガード下やトンネル等を自車両1がすり抜け等する際に、運転支援処理部8により、ポールや自転車等の物標がレーダ5の水平方向の検知角と搭載位置のオフセット量とに基づいて設定された所定距離以内に接近し、レーダ5が片側の物標を見失うと、物標位置の情報がなまし処理によって検出している片側の物標の位置より見失った物標側にずれて得られ、衝突の可能性があると誤判定されるときに、レーダ5の物標位置の情報に基づく運転支援を禁止して衝突可能性の誤判断を防止する。
(もっと読む)
車輪位置検出装置
【課題】簡易な構成で、車輪の数だけアンテナを設置する必要なく、車輪の取付位置を検出することが可能な車輪位置検出装置を提供する。
【解決手段】第1車体側通信機を、車輪側通信機からの応答信号のうち、1つの応答信号の受信強度が予め定められた第1受信強度閾値を上回る第1受信強度帯域に含まれ、かつ残余の応答信号のうち2つの受信強度が第1受信強度閾値を下回る第2受信強度帯域に含まれる位置に取り付け、第1受信強度帯域に含まれる応答信号を送信した車輪側通信機に第1車輪取付位置IDを付与し、第2受信強度帯域に含まれる応答信号を送信した2つの車輪側通信機のそれぞれに第2車輪取付位置IDを付与し、これら2つの車輪側通信機のいずれか一方の応答信号の受信強度が第1受信強度帯域に含まれ、かつ第1車輪取付位置IDを付与した車輪側通信機の応答信号の受信強度が第2受信強度帯域に含まれる位置に第2車体側通信機を取り付ける。
(もっと読む)
目標追尾装置、目標追尾方法、及びプログラム
【課題】センサを有効活用して多くの目標を追尾可能とする。
【解決手段】目標追尾手段10は、センサ装置61、62の観測値から、目標の探知や、目標の状態を推定する。センサ状態管理手段20は、センサ装置61、62の状態を管理する。目標軌道予測手段30は、目標の状態から、目標の将来位置を予測する。センサ割当・方位変更計算手段40は、センサの状態と目標の将来位置とから、ネットワークの経路探索を行うことにより、センサ割当スケジュールと方位変更スケジュールとを算出する。センサ制御装置50は、センサの状態、目標の将来位置、センサ割当スケジュール、及びセンサ方位変更スケジュールから、目標追尾と方位変更とを指示する。センサ装置61、62は、センサ制御装置50からの指示に従って、目標追尾と方位変更とを実行する。
(もっと読む)
鳥獣追跡システム
【課題】電力消費を最小限に抑えつつ、鳥獣の生息環境の即時的な把握が可能な鳥獣追跡システムを提供する。
【解決手段】鳥獣追跡システムは、鳥獣2に装着可能な鳥獣タグ3と、複数の基地局1a,1bと、データセンタ6とを備える。鳥獣タグと基地局とは、夫々の時刻取得装置に基づきビーコンの周期的な送受信の同期を取る。鳥獣タグは、いずれの基地局とも通信圏外にあるときは無線機によるビーコン受信を停止し、動き感知センサが鳥獣の静止状態を検知したときは、GPSセンサによるデータ取得周期を延長させる。また、データ取得時のみ、最小時間、GPSセンサを起動させる。なお、鳥獣タグが通信圏外にあり、かつ、鳥獣タグメモリが満杯であるときは、保存された位置データを時間均等に間引くとともに、GPSセンサによるデータ取得周期も間引間隔に併せて延長させることが好ましい。
(もっと読む)
TIS−B装置及び情報配信方法
【課題】TIS−Bを利用する場合、二次監視レーダや航空機に悪影響を与えることなく信号を配信する。
【解決手段】二次監視レーダから当該二次監視レーダのアンテナの回転状況を入力し、入力したアンテナの向きが所定の範囲内であるか否かを判定する判定手段213と、判定手段によってアンテナの向きが所定の範囲内であると判定されると、信号の配信を制限する送信制御手段214とを備える。
(もっと読む)
位置推定装置およびプログラム
【課題】無線信号を送信する送信装置の位置を高精度で推定することのできる位置推定装置およびプログラムを得る。
【解決手段】入館管理装置20により、RFIDタグ52の位置を送信された無線信号に基づいて推定し、かつ当該推定対象とする領域を撮影するカメラ40によって得られた画像情報に基づいて前記領域に存在する人の位置を導出し、少なくとも推定したRFIDタグ52の位置を入力情報とし、補正後のRFIDタグ52の位置を示す物理量を出力情報とし、当該出力情報の正解情報を用いた学習機能を有するニューラル・ネットワークにより得られた物理量を用いて、推定したRFIDタグ52の位置を補正する一方、位置の推定対象としたRFIDタグ52の所持者が、位置の導出対象とした人とみなされる予め定められた条件を満足した場合に、導出した前記人の位置を示す物理量を前記正解情報としてニューラル・ネットワークを学習させる。
(もっと読む)
位置決め装置の異常変位を判定するためのシステム、方法、および装置
【課題】 空間内の位置決め装置が変位されたかどうかを判定するための技術的解決法を提供する。
【解決手段】 本発明の実施例では、空間内の位置決め装置が変位されたかどうかを判定するためのシステム、方法、および装置が提供される。具体的には、測距信号を発する機能を有するタグと、当該タグからの測距信号に基づいて、当該タグが位置する位置点の位置決め装置に対する相対座標を取得するように構成された位置決め装置と、空間内の位置点の相対座標、位置決め装置の較正パラメータ、および信頼済み絶対座標に基づいて、位置決め装置が変位されたかどうかを判断するように構成されたサーバとを備えることのできるシステムが提供される。本発明の実施例により、位置決め装置が変位されたかどうかの判定を正確、包括的、かつリアルタイムに行うことができる。
(もっと読む)
レーダ装置およびセンサインタフェース装置
【課題】本発明は、速度センサまたは加速度センサと共に同じ移動体に搭載されたレーダ装置と、これらのセンサの何れかとレーダ装置とのインタフェースをとるセンサインタフェース装置に関し、構成が大幅に複雑化することなく、目標との相対距離が広範かつ急激に増減する状態であっても性能を高く安定に維持できることを目的とする。
【解決手段】波動信号に応じて目標から到来した到来波に基づいて前記目標の速度、距離、位置、性質の何れかの識別を行うレーダ装置であって、前記レーダ装置と共に同じ移動体に搭載された速度センサまたは加速度センサを用いて前記波動信号が送信される方向における前記移動体または前記レーダ装置の速度を特定し、前記速度に応じて前記波動信号に生じるドップラシフトを特定するドップラシフト特定手段を備え、前記レーダ装置は、前記波動信号の周波数を前記ドップラシフトに亘って補正する補正手段を有する。
(もっと読む)
セキュリティシステム
【課題】読取装置の読取エリアを広くしても、端末器の正確な所在管理を行うことができるセキュリティシステムを提供する。
【解決手段】端末識別情報を有するタグ1と、読取エリア2aに存在するタグ1から、その端末識別情報を読み取るためのリーダ2と、読取エリア3aに存在するタグ1から、その端末識別情報を読み取るためのリーダ3と、リーダ2及び3が読み取った各端末識別情報に基づいて、タグ1の所在を管理する制御部4とを備える。制御部4は、リーダ2が読み取りを行うと、そのタグ1の所在情報をリーダ2の設置位置情報に合わせて更新する。また、制御部4は、リーダ3が読み取りを行うと、そのタグ1の所在情報とそのリーダ3の設置位置情報とが所定の条件で一致する場合に、上記タグ1の所在情報を上記リーダ3の設置位置情報に合わせて更新し、一致しない場合は、タグ1の所在情報の更新を行わない。
(もっと読む)
レーダーシステム及びその製造方法
送信アセンブリ(10)、受信アセンブリ(20)、制御部(30)及び信号処理部(40)を含むレーダーシステム(100)について述べる。送信アセンブリ(10)は、入力信号(31)を受信し、入射レーダー信号(2)を送信する。送信アセンブリ(10)は、レンズキャビティ(74)、複数のビームポート(60)、複数のアレイポート(62)及びパッチアンテナアセンブリ(14)を有するRotmanレンズ(12)を含む。レンズキャビティ(74)は、10ミクロン〜120ミクロン、好ましくは40ミクロン〜60ミクロンのレンズギャップ(h)を有する。パッチアンテナアセンブリ(14)は、Rotmanレンズ(12)から複数の時間遅延同相信号を受信し、入射レーダー信号(2)をターゲット(4)に向けて送信するように動作可能な複数のアンテナアレイ(130)を含む。受信アセンブリ(20)は、反射レーダー信号(6)を受け取り、出力信号を生成する。信号処理部(40)は、入力信号(31)を出力信号と比較し、ターゲット(4)のレンジ、速度及び位置を決定するアルゴリズムを実施する。 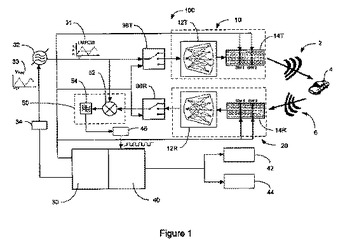 (もっと読む)
(もっと読む)
拡張現実におけるオブジェクトの追跡
一般的に、オブジェクトを追跡するための技術が説明される。いくつかの実施例では、システムは、モバイルフォンおよび拡張現実デバイスを備えてよい。モバイルフォンは、送信波を受信し、オブジェクトから反射された反射波を受信するのに有効である。モバイルフォンは、送信波と反射波との間の差異を判定し、判定された差異に基づいて第1の追跡データを生成するように構成され得る。拡張現実デバイスは、第1の追跡データを受信し、第1の追跡データに基づいてオブジェクトの位置に関する第2の追跡データを判定するように適応され得る。判定された第1の追跡データおよび第2の追跡データに基づいてディスプレイ上で画像が生成され得る。 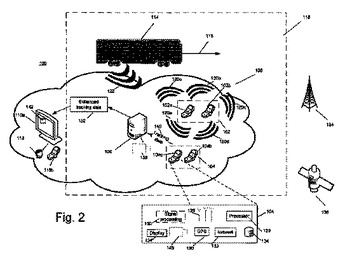 (もっと読む)
(もっと読む)
追尾装置
【課題】正確な追尾結果を得ることができる追尾装置を得る。
【解決手段】航跡確立判定結果に基づきどの観測時刻の観測データを推定に用いるかを選択する観測データ管理部12と、選択された観測時刻を全て基準時刻として設定し、各基準時刻における航跡の候補を状態ベクトル候補として生成する選択時刻状態候補生成部13と、状態ベクトル候補の尤度比を計算して、各基準時刻における尤度比が最大の状態ベクトル候補を探索する状態空間概探索部14と、各基準時刻における尤度比が最大の状態ベクトル候補を初期値として、反復計算により各基準時刻における尤度比が最大の状態ベクトル推定値を探索する状態空間詳細探索部15と、各基準時刻における尤度比が最大の状態ベクトル推定値の対応関係から最新時刻の最も確からしい状態ベクトル推定値を決定する状態相関処理部16と、前記状態ベクトル推定値から航跡の確立を判定する航跡確立判定部22とを備える。
(もっと読む)
目標追尾装置
【課題】 従来、目標の諸元のみから予測時刻における目標の位置等を予測しているために、追随遅れを生じたり、観測された目標の位置と予測位置の差異が大きくなり、安定追尾をすることが困難となる場合があった。
【解決手段】 目標の移動先となる目的地及び予測経路を目的地の優先度、目標の運動諸元を元に推定し、その目的地に向けた移動経路を等速円運動や比例航法により予測することにより、予測位置と観測される目標との位置差を減少させ、追随遅れの解消や安定した追尾維持や追尾精度向上を実現する。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】監視対象範囲を分割した複数の分割範囲ごとに目標物の数量の管理をする。
【解決手段】監視対象範囲を複数の分割範囲に分割した分割範囲ごとに、センサそれぞれの目標物を探知する確率を示す情報またはセンサそれぞれの監視範囲の地形を示す情報を用いて、分割範囲において目標物を探知することができる確率を示す探知率を求め、分割範囲ごとにセンサそれぞれが偽目標物を探知してしまう確率を示す偽探知率を求め、対象の分割範囲に所在する目標物の前回更新した数量に対する最新の数量の増加した数量あるいは減少した数量を求め、増加した場合、増加処理をし、減少した場合に、減算処理をして、対象の分割範囲の目標物の数量を更新することを目標物管理装置である。
(もっと読む)
物体検知装置および物体検知方法
【課題】相互に属性が異なる複数の物体の存否、位置、変位または属性の検知ないし測定を簡単な構造により高精度に行うと共に、相互に属性が異なる複数の物体を確実に識別する。
【解決手段】発振器11から発せられる基本送信信号から相互に周波数が異なる複数の単位送信信号を生成し、これらの単位送信信号を合成して合成送信波として送信する。そして、検知対象物に反射した合成送信波の反射波を受信し、この反射波を周波数ごとに分離して複数の単位受信信号を生成し、複数の単位送信信号と複数の単位受信信号とを周波数ごとにそれぞれ重畳することにより形成される複数の定在波のそれぞれの振幅値に基づいて検知対象物の存否、位置、変位および属性を検知する。
(もっと読む)
画像処理装置、レーダ装置、画像処理方法および画像処理プログラム
【課題】表示に視覚的な違和感が生じないように代表位置を決定する手法を実現した画像処理装置を提供する。
【解決手段】画像処理部17は、画像メモリ16から入力した画像データとテンプレート画像データとのマッチングを行う。例えば、一致度が最も高いテンプレート画像データを選定する。各テンプレート画像データには、それぞれ位置データが定めれており、画像処理部17は、選定されたテンプレート画像データに対応付けられている位置データに基づいて、入力した画像データの代表点を設定する。
(もっと読む)
移動物体の監視システム
【課題】監視する必要のある移動物体をより的確に監視できるようにする。
【解決手段】漏洩伝送装置を伝送媒体として漏洩伝送装置の両端の一方の端側から他方の端側へ第1の送信信号を送出する第1の機器100、漏洩伝送装置を伝送媒体として漏洩伝送装置の両端の他方の端側から一方の端側へ第2の送信信号を送出する第2の機器200、及び第1及び第2の漏洩伝送路301,302の一方の漏洩伝送路から第1の送信信号が放射した第1の電波が監視対象の移動物体に反射した第1の反射電波を漏洩伝送装置を介して受信した第1の受信信号の変化と第1及び第2の漏洩伝送路の一方の漏洩伝送路から第2の送信信号が放射した第2の電波が監視対象の移動物体に反射した第2の反射電波を漏洩伝送装置を介して受信した第2の受信信号の変化との違いに基づいて監視対象の移動物体の2次元の動きを検知する検知部400を備えている。
(もっと読む)
241 - 260 / 1,245
[ Back to top ]