
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
181 - 200 / 2,290
管制装置、航空機、及び管制方法
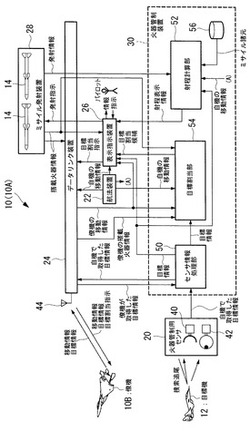
【課題】目標に対する射撃を行うための火器管制を効率良く行うことを目的とする。
【解決手段】航空機10は、データリンク装置24によって、僚機10Bから僚機10Bの移動情報及び僚機10Bが捜索追尾によって取得した目標情報を受信し、自機の移動情報及び自機が捜索追尾によって取得した目標情報を僚機10Bへ送信する。そして、航空機10は、目標割当部54によって、データリンク装置24で受信した僚機10Bの移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行い、割当結果である目標割当指示を僚機10Bへデータリンク装置24によって送信する。
(もっと読む)
レーダ装置、及び電波伝送装置

【課題】導波管と基板との位置ずれによる伝播ロスを低減する。
【解決手段】平面アンテナと、前記平面アンテナと電波を送受信する電波送受信部を搭載する回路基板と、前記平面アンテナと前記回路基板とを接続する電波伝送装置と、前記平面アンテナ、前記回路基板、前記電波伝送装置を収容するケースと、を備えるレーダ装置であって、前記電波伝送装置は、前記電波が流れる導波管と、前記導波管の前記回路基板側に設けられ、前記平面アンテナ側の開口部よりも前記回路基板側の開口部が大きく形成されたテーパ部とを有する。
(もっと読む)
目標追跡装置
【課題】等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させることができる目標追跡装置を得る。
【解決手段】目標を追跡するアクティブセンサ3からの観測値に基づく目標航跡と、目標の角度を測定するパッシブセンサ1からの観測値に基づく目標航跡とが同一目標を示していると判定した場合にこれら2つの目標航跡のデータ融合を行ってデータ融合航跡として出力するデータ融合部5と、データ融合部からのデータ融合航跡に基づいて、パッシブセンサからの観測値を入力して目標の航跡を算出するための補正情報を算出する補正情報算
出部6aと、パッシブセンサからの観測値と補正情報算出部からの補正情報に基づいて、複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標航跡として出力するパッシブセンサ処理部2aを備える。
(もっと読む)
電波計測システム
【課題】屋内エリアの地図データを作成し、作成した地図データに基づいて管理者により指定された経路を自律的に移動しながら電波環境データを測定する。
【解決手段】周囲の壁面までの距離を方位毎に測距する測距センサ207と、屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定部203と、受信電力測定部203で測定された受信電力データの大きさを判定する受信電力判定部215と、測距センサ207により測距された測距データから屋内エリアの地図データを作成する地図データ作成部217と、サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段208、209と、受信電力判定部215の判定結果に基づいて走行手段を構成するモータ209の回転速度を制御して自ロボットの移動速度を制御するモータ回転制御部216とを備える。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、全方位に亘って同一PRIを使用しているため、見通し外となる範囲を含む方位に対しても同一PRIを使用し、時間的リソースを有効に使用できていない。
【解決手段】 この発明のレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備えるようにした。
(もっと読む)
物体認識装置
【課題】車載カメラのような他のセンサをさらに備えることなく低コストに、車載レーダが受信した反射点群のパターンから認識対象の物体を認識できるようにする。
【解決手段】レーザレーダ2が受信した反射点群のパターンの自車両1に対して反対方向に屈曲したL字状部分を分離処理部6により分離し、分離処理部6が分離したL字状部分が一部を構成する矩形に基づき、物体属性推定部8により認識対象の物体を認識する。
(もっと読む)
レーダ装置及びカーブ判定プログラム
【課題】前方がカーブしている道路であるか否かを判定する。
【解決手段】電波を送信する送信アンテナ3と、送信された電波が対象物により反射された電波を受信する複数の受信アンテナ11〜1nと、受信された電波の方位毎に対象物と受信アンテナ11〜1nとの相対距離に対する受信された電波の強度の関数を算出するDBF処理部23と、受信された電波の方位毎にDBF処理部23により算出された関数から代表点を抽出する代表点抽出部と、代表点抽出部により抽出された前記受信された電波の方位毎の代表点の距離を比較することにより、前方がカーブしている道路であるか否かを判定するカーブ判定部と、を備える。
(もっと読む)
車載用頭部位置検出装置、車載用表示装置及び運転支援装置
【課題】頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置を提供する。
【解決手段】実施形態によれば、複数の送受信器と送受信制御部とを備えた車載用頭部位置検出装置が提供される。複数の送受信器は、車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられる。複数の送受信器は、頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、反射波を受信する。送受信制御部は、複数の送受信器に接続される。送受信制御部は、複数の送受信器のいずれかに、送信波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その結果に基づいて頭部に最も近い送受信器を検出する。送受信制御部は、頭部に最も近い送受信器に頭部検出波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その受信結果に基づいて頭部の位置を検出する。
(もっと読む)
FMCWレーダーシステム
【課題】1つのアンテナで間欠的に送受信を行う場合にもターゲット検出能力の劣化を防止することのできるFMCWレーダーシステムを提供する。
【解決手段】送信部と、アンテナと、受信部と、アンテナ共用部とを備えるFMCWレーダーシステムであって、送信部がローカル信号発生部と、送信信号発生部と、送信側ミクサと、間欠的に送受信開始指令を出力する送信側制御部と、を備え、受信部が、ビート波を生成する受信側ミクサと、ハイパスフィルタと、ターゲット情報抽出部と、を備え、送信信号発生部が、送受信開始指令の読み込み後に、振幅が零から所定の振幅まで徐々に大きくなる振幅漸増信号、周波数が所定の範囲で連続的に変化するチャープ信号、および振幅が零まで徐々に小さくなる振幅漸減送信信号を順次出力する。
(もっと読む)
車載用のマルチビーム方式レーダ装置、マルチビーム方式レーダ方法およびマルチビーム方式レーダプログラム
【課題】複数の異なるFOVを切り替えることができ、ターゲットに関する検出を高精度に行うことができる車載用のマルチビーム方式レーダ装置を提供する。
【解決手段】車載用のマルチビーム方式レーダ装置102は、送信波を送信し、当該送信波がターゲットによって反射されて到来する受信波を受信するアンテナを構成する複数のビーム素子2−1〜2−5と、前記複数のビーム素子2−1〜2−5のうちで送受信に使用するビーム素子を切り替えて視野角を切り替える制御部33と、希望の仮想的なアレーアンテナの素子数と素子間隔に対応して、前記制御部33により切り替えられた送受信に使用するビーム素子により受信した受信波のデータであるビーム素子データをフーリエ変換して、仮想アレーデータを生成し、生成した前記仮想アレーデータに基づいて所定の処理を行う処理部(信号処理部8の方位検出部)と、を備えることを特徴とする。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】過去制御サイクルのデータの使用や取得回数の増加による相関行列等の平均処理をしなくても、ターゲットの分離性能を向上できる。
【解決手段】移動体に搭載される電子走査型レーダ装置100であり、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信部と、送信波及び前記受信波からビート信号を生成するビート信号生成部と、ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理部22と、ビート信号に基づいて算出された複素数データに基づいて、複素数データの初期位相を補正し、補正後の複素数データに基づいて受信波の到来方向を算出する方位検出部28とを備える。
(もっと読む)
レーダ信号処理装置
【課題】 従来のV−chirp方式では、クラッタ環境化において目標からの受信信号のパルスのピークがクラッタ信号に覆われて、目標を検知できない可能性があり、これを改善することのできるレーダ信号処理装置を得る。
【解決手段】 レーダ信号処理装置は、アップチャープまたはダウンチャープの変調をかけた偏波信号を目標に対して送信し、目標からの反射波を偏波受信し、A/D変換により得られた受信ビデオ信号に偏波信号処理を施すことにより、クラッタを抑圧し、抑圧後の受信ビデオ信号をパルス圧縮し、パルス圧縮により生成された信号から目標までの距離を算出し、アップチャープ受信ビデオ信号及びダウンチャープ受信ビデオ信号をパルス圧縮することにより得られた信号の強度に基づく距離の差から、目標との相対速度、相対距離を算出することができる。
(もっと読む)
車載用のマルチビーム方式レーダ装置、マルチビーム方式レーダ方法およびマルチビーム方式レーダプログラム
【課題】ターゲットに関する検出を高精度に行うことができる車載用のマルチビーム方式レーダ装置を提供する。
【解決手段】車載用のマルチビーム方式レーダ装置101は、送信波を送信し、当該送信波がターゲットによって反射されて到来する受信波を受信するアンテナを構成する複数のビーム素子2−1〜2−Mと、希望の仮想的なアレーアンテナの素子数と素子間隔に対応して、前記複数のビーム素子2−1〜2−Mにより受信した受信波のデータであるビーム素子データをフーリエ変換して、仮想アレーデータを生成し、生成した前記仮想アレーデータに基づいて所定の処理を行う処理部(信号処理部8の方位検出部)と、を備えることを特徴とする。
(もっと読む)
レーダ装置
【課題】本発明は、レーダ装置に係り、追尾対象の物標を正確に検出することにある。
【解決手段】電波を送信する送信手段と、送信手段から送信される電波の反射波を受信し得る受信手段と、受信手段に受信される信号のうちから反射波の信号レベルと反射波以外の信号レベルとを閾値により区別する受信信号レベル判定手段と、受信信号レベル判定手段により区別された反射波を示す信号に基づいて、物標の距離又は方位を検出する物標検出手段と、物標検出手段により検出される距離又は方位の時間的変化量が所定量以下である物標を追尾対象に、かつ、該時間的変化量が該所定量を超える物標を追尾対象外に、それぞれ設定する物標設定手段と、物標設定手段により設定される追尾対象の物標及び追尾対象外の物標に基づいて、受信信号レベル判定手段にて用いる閾値を変更する閾値変更手段と、を設ける。
(もっと読む)
レーダ装置
【課題】検知範囲の変更が可能で、而も小型化を可能としたレーダ装置を提供する。
【解決手段】中心に設けられる信号処理ユニット2と、該信号処理ユニットに組込まれ、ホーン型送受信アンテナ6を有する少なくとも1つの高周波ユニット3とを具備し、前記信号処理ユニットは円周方向に等角度で順次傾斜する側面を有し、内部に信号処理部を有すると共に前記側面には前記信号処理部に接続されたソケットが設けられ、前記高周波ユニットは上下に縦長の送信用アンテナ開口21と受信用アンテナ開口22とを有すると共に前記ソケットに嵌合するコネクタとを有する。
(もっと読む)
タカン地上装置、該装置に用いられる受信信号監視方法及び受信信号監視プログラム
【課題】タカン機上装置から距離質問電波を受けるときに妨害波が存在する場合でも、正常に運用されるタカン地上装置を提供する。
【解決手段】受信信号監視手段(干渉波監視部16、同軸スイッチ17)により、受信信号取得手段(サーキュレータ14)により取り出された受信信号rsが各方位毎に監視され、CW妨害波が含まれている場合、同CW妨害波が存在する方位の受信信号rsが遮断され、CW妨害波のない方位の受信信号rsが取り出され、受信信号合成手段(合成器18)により合成されて合成信号csが出力される。受信手段(受信機19)により、合成信号csが受信され、受信機出力信号rmが出力される。送信手段(送信機11)により、所定の遅延時間経過後に、受信信号rsに対する応答送信信号(応答送信パルスps)が出力される。モニタ部20により、応答送信パルスpsが監視される。
(もっと読む)
レーダ装置
【課題】 パルス・ドップラ・レーダにおいて、CFAR処理による目標の探知、追尾時に、目標から受ける妨害電波や、JEM(Jet Engine Modulation)によって、目標と同一レンジ上の周波数方向に不要波が発生し、CFAR処理に用いるノイズ領域に不要波が入りこみ、検出対象のS/N比が低下することで、目標信号の検出ができなくなってしまうという問題があった。
【解決手段】 CFAR処理を行う際のノイズ領域を、レンジ方向にオフセットした位置に設定することで、目標信号と同一レンジ上に発生する特定の妨害電波やJEMによる不要波を、ノイズ領域に捉えることがなくなり、検出対象のS/N比を正しく検出できるので、目標信号を安定して検出することが可能となる。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を適正に探知する開口合成を可能とする。
【解決手段】目標を探知するレーダ装置において、空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、各基準パスの受信信号の包絡線間の積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、決定された位相補正量を用いて、2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部とを含む。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】記憶するデータの記憶容量とデータ取得回数を増大することなく、検出精度を高めた方位検出ができる。
【解決手段】周波数分解処理部がビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データを要素とする行列の特異値に基づいて受信波の波数を推定し、該推定された波数に応じた数の特異値に基づいて作成される信号部分空間によって示される信号部分空間の擬似逆行列に基づいた係数を生成し、該生成された係数に基づいて受信波の到来方向を算出する。
(もっと読む)
レーダ装置、レーダ受信装置及び目標検出方法
【課題】 目標が低RCSである場合であっても、目標を検出することが可能なレーダ装置と、このレーダ装置で用いられるレーダ受信装置及び目標検出方法を提供すること。
【解決手段】 レーダ装置は、送信装置、無線部、4次元データ生成部、予測部、積分処理部及び目標検出部を具備する。送信装置は、送信パルスを送信する。無線部は、送信パルスが反射等された反射パルスを受信する。4次元データ生成部は、反射パルスに対してレンジ毎にDFTを行い、周波数ビン毎の周波数バンク信号を生成し、1スキャンにより取得される周波数バンク信号を、レンジと、方位角及び仰角と、相対速度とにより特定される4次元データへ変換する。予測部は、4次元データに基づいて予測4次元データを作成する。積分処理部は、4次元データと、前のスキャンに基づいて作成された予測4次元データとを積分する。目標検出部は、積分結果に基づいて目標を検出する。
(もっと読む)
181 - 200 / 2,290
[ Back to top ]