
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
361 - 380 / 873
信号処理装置、レーダ装置、及び信号処理方法

【課題】複数の目標物体のピーク周波数が近似することによる方位角の検出精度低下を防ぐ。
【解決手段】周波数変調を施した送信信号の反射信号をアンテナ群により受信信号として受信し、前記アンテナごとに前記送信信号と受信信号の周波数差に対応する周波数を有するビート信号を生成するレーダ送受信機の信号処理装置は、前記アンテナの対ごとに共通の周波数における前記ビート信号の位相差に基づいて目標物体の方位角候補を検出し、前記方位角候補群のうち、過去に検出された検出方位角の変化量から予測される予測方位角と所定誤差範囲内で一致する方位角候補を抽出し、前記予測方位角と前記抽出された方位角候補とに基づいて当該目標物体の方位角を検出するので、複数の目標物体のピーク周波数が近似することにより方位角候補の検出精度が低下しても、予測方位角を用いることで検出方位角の精度低下を防ぐことができる。
(もっと読む)
レーダ装置

【課題】超分解能測角処理時に、不要な他の信号が混入して誤った方位角が得られることがある。
【解決手段】複数目標との相対距離や相対速度を算出し、超分解能測角処理を行う演算装置13を用いて方位角を測定するレーダ装置において、前記演算装置13は、検出したある目標について、2つの方位角が得られた場合、検出した他の目標の中から、方位角が前記2つの方位角のいずれかに等しく、かつ上昇または降いずれかの変調時にビート信号の周波数が等しい目標を探す他信号検出処理を行い、前記他信号検出処理により、条件を満たす他の目標が検出された場合には、前記検出したある目標の2つの方位角のうち、他信号検出処理により検出された他の目標の方位角と等しい側の方位角を削除するようにした。
(もっと読む)
レーダ装置
【課題】任意の方向にビーム走査を行って目標の追尾を行うレーダ装置において、クラッタマップを用いてクラッタによる誤警報を抑圧する。
【解決手段】クラッタマップ部11は、捜索/追尾区分情報及び送受信方向情報に基づき、捜索時には、受信機の出力信号の距離・方向毎に、時間方向の平均値を算出してクラッタマップを生成し、追尾時には、捜索時に生成したクラッタマップにアンテナのサイドローブ形状に基づいて重み付け合成処理をした信号を検出部に出力する。
(もっと読む)
衝突直前状態を検出する確認センサを含むセンサシステム
本発明に関する少なくとも1つの実施形態において、自動車の衝突直前状態を検出するセンサシステムが提供される。センサシステムは、差し迫った衝突の激しさおよびその衝突までの残り時間の所見を提供する主レーダ装置を含む。確認センサを含む別個の確認検出装置は、確認出力を供給するために自動車に隣接する近場のスペース内を検出する。この主レーダ装置および確認検出装置と通信するのは、電子制御装置である。この装置は、主レーダ出力および確認検出出力の評価に依存して、安全装置に対する展開信号を発生するように構成される。 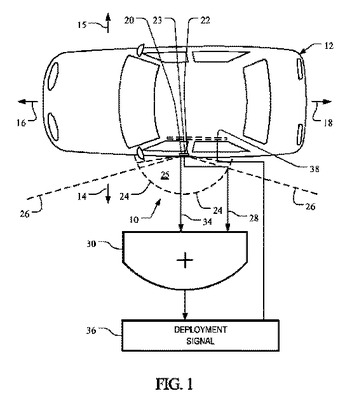 (もっと読む)
(もっと読む)
広帯域レーダ装置
【課題】レーダ装置に関し、特に、超広帯域の電波を送受信して移動物体等の目標の位置を高精度で検出する広帯域レーダ装置に関し、複数の受信波を合成して目標物体の距離や方位等を検出するレーダ装置において、送信及び受信アンテナ間の距離が小さく、目標物体が広帯域レーダ装置から距離が離れた場合でも、目標物体の方位精度を高めた小型かつ超広帯域レーダ装置を得る。
【解決手段】2つの受信アンテナ部で受信した2つの受信パルス信号が、サンプリング積分検波されて2つのデジタル信号に変換された後、移動物体を検出した2つの応答差分信号が得られる。2つの信号から、任意の距離離れた第1の仮想受信アンテナ部及び第2の仮想受信アンテナ部で受信する擬似応答差分信号が算出される。この信号を用いて移動目標の距離と方位を検出することで、目標物体の距離がある程度離れても、方位精度を高めることができる。
(もっと読む)
移動体搭載レーダ装置及びキャリブレーション方法
【課題】被搭載移動体の移動中におけるアンテナ波面のずれを補正する。
【解決手段】レーダ信号処理装置Rにおいて、通常運用前に、既知方位ターゲットに対する方位を測定し、測定結果から各アンテナ素子の方位補正値を算出して記憶回路141に記憶しておき、実運用時に記憶した方位補正値に基づいて各素子の受信信号の位相を制御する。通常運用段階において、既知方位に目標ターゲットを配置してその方向にパルスを放射し、アンテナを介して受信される目標反射信号に基づいて目標からの到来方位を測定し、モジュール補正量算出回路151にて、測定到来方位と既知目標方位との差がゼロになるように、各サブモジュールLiの合成出力の振幅・位相差に対する補正値を算出してメモリ1512に記憶しておき、実運用時にメモリ1512からビーム指向方向に対する各サブモジュールLiそれぞれの機体変形による位相誤差の補正値を求め、波面のずれを補正する。
(もっと読む)
レーダ装置、及びターゲットの速度進行方向推定方法
【課題】特に、ターゲットの速度が遅いときに、精度の高いターゲットの速度、及び進行方向を推定できるレーダ装置を提供する。
【解決手段】ターゲットの速度、及び進行方向を推定して衝突予測を行うレーダ装置であって、所定の時間一定の周期でターゲットを捕捉するターゲット捕捉部と、ターゲット捕捉部が捕捉した捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する衝突予測部と、衝突予測部の推定したターゲットの速度が所定速度以下である場合、推定したターゲットの速度に応じてターゲットを捕捉する時間を増加させて捕捉点の数を増加させるターゲット捕捉制御部とを備え、衝突予測部は、前記ターゲット捕捉制御部が捕捉点の数を増加させた後の全ての捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する。
(もっと読む)
信号処理装置、及びレーダ装置。
【課題】 機械走査方式のレーダ装置においてアンテナが所期の反転位置からずれた位置で反転したときでも精度よく回動角度を検出する。
【解決手段】所定の角度範囲内で往復回動する回動部が単位角度回動するときに角度信号が入力される信号処理装置であって、前記角度信号の状態遷移に基づいて前記回動部の回動方向の反転を検出する反転検出手段と、前記反転を検出した後に入力される前記角度信号に基づき前記回動部の回動角度を検出する回動角度検出手段とを有し、前記回動角度検出手段は、前記反転検出手段により前記回動部の第1の反転が検出された後第2の反転が検出されるまでに入力された前記角度信号に基づき、前記第2の反転が検出された後に入力される角度信号に基づく回動角度を補正するので、所期の反転位置からの角度信号に基づく回動角度を検出できる。
(もっと読む)
レーダ装置
【課題】物標情報を高精度に求めることが可能なレーダ装置を提供すること。
【解決手段】本発明が適用されたレーダ装置は、FMCW方式のレーダ装置であり、変調周期毎に、受信結果を表すビート信号からスナップショットデータを生成する。また、各変調周期のスナップショットデータから生成した変調周期毎の自己相関行列を、複数周期分平均化し、その平均化後の自己相関行列に基づき、MUSIC法により物標方位を求める。但し、平均化は、各変調周期のスナップショットデータに含まれる雑音成分の量(干渉量)に基づき、加重平均により行う。即ち、各変調周期の自己相関行列に作用させる重み付け係数を、その変調周期の干渉量に応じた値に設定する(S570)。干渉量が小さい場合には重み付け係数を大きく、干渉量が大きい場合には、干渉量を小さくといった具合である。
(もっと読む)
信号処理装置、及びレーダ装置。
【課題】 電子スキャン方式のレーダ装置においてアンテナ間隔をある程度離間させた状態であっても、方位角検出範囲を広角化する。
【解決手段】 目標物体に反射された送信信号を複数のアンテナで受信して前記アンテナごとのビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号を合成して合成ビート信号を生成する合成手段と、前記ビート信号のいずれかと前記合成ビート信号に基づいて前記目標物体の方位角を検出する方位角検出手段とを有するので、アンテナ対の間に仮想アンテナを配置した場合にこの仮想アンテナにより得られるビート信号と同じ位相の合成ビート信号を得ることができ、ビート信号と合成ビート信号とに基づき方位角を検出することで、アンテナ間隔をある程度離間させたままで位相折り返しが発生しない方位角検出範囲を広角化できる。
(もっと読む)
距離測定装置
【課題】複数の単位アンテナを備えるアレイアンテナ装置において、単位アンテナの相互間での受信伝送特性のばらつきを補正する手段を提供することを目的とする。
【解決手段】距離測定装置は、無線タグまでの距離の測定を行う通常モードで動作する他、各受信単位アンテナ18の受信伝送特性に対する補正値を求めるキャリブレーションモードで動作する。キャリブレーションモードにおいては、送信側スイッチ14の端子Aを端子Cに接続する。また、受信側スイッチ22の端子Dを端子Fに接続する。送信信号生成部10は、基準正弦波信号Rを各無線受信部24に出力する。各特性補正部28は、基準正弦波Rに基づいて求められた補正値を記憶する。記憶された補正値は、通常モードにおける特性補正処理に用いられる。
(もっと読む)
衝突予測装置
【課題】自車前方に存在する物体と自車とが衝突する危険性を精度良く予測可能な衝突予測装置を提供する。
【解決手段】車両前方の物体の位置を検出する物体検出手段と、車両内部または当該車両の外周面上で、且つ、当該車両の前端より後方に、物体を観測するための観測点を定める観測点設定手段と、観測点から見た物体の検出方向を示す検出角度を算出する検出角度算出手段と、検出角度の単位時間当たりの変化量を算出する変化量算出手段と、車両と物体とが衝突する危険性を変化量の値に基づいて予測する衝突判定手段とを備える、衝突予測装置である。
(もっと読む)
二次監視レーダ装置
【課題】給電系が変化した場合において、各チャンネル間の振幅・位相特性の調整を自動で行うことが可能となり、これにより運用における長期間の安定度の確保が可能な二次監視レーダ装置を提供する。
【解決手段】空中線装置3で得られる和パターンΣ及び差パターンΔに代えて、オムニパターンの給電系上のパイロット信号発生回路7で生成される既知の振幅・位相特性を有するパイロット信号をパイロット注入回路8にて和パターンΣのチャンネル及び差パターンΔのチャンネルに注入し、これらチャンネルの試験信号を利用して、振幅/位相検出回路12にて各チャンネル間の信号の振幅差及び位相差を検出し、比較回路14にて予め保持部13に保持されている基準値と比較することで、設置条件の変更等により給電系が変化したか否かを判断し、変化した場合には、変化したことによるチャンネル間の信号の振幅・位相特性を自動で調整するようにしている。
(もっと読む)
モノパルスレーダ装置
【課題】マルチパス干渉状態で適切な信号処理を実行できるように、マルチパス干渉が起こっているか否かを精度良く判定することが可能なモノパルスレーダ装置を提供する。
【解決手段】モノパルスレーダ装置101は、送信部104から電波を放射し、その反射波を複数の受信部105(a)、105(b)で受信して、自車両201の前方に存在するターゲット車両301〜306を検知するものであって、予め設定された時間間隔を空けて検知した複数回の検知結果に基づいて、マルチパス干渉が起きているか否かを判定するマルチパス干渉判定手段を備える。かかる構成により、1回の信号強度比較結果に基づいてマルチパス干渉が起こっているか否かを判定する場合と比較して、精度良く判定することができ、マルチパス干渉が起こっている場合に、干渉時の特性に応じた信号処理を用いて、より適切な処置を行うことができる。
(もっと読む)
方位検出装置
【課題】受信波をアナログ的に合成することによってビーム形成して受信波の到来方向を求める方位検出装置おいて、方位分解能を向上させる。
【解決手段】受信波を合成することでアナログ的にビーム形成された受信信号に基づくビート信号をサンプリングし、そのサンプリング値をFFTした処理結果からピーク周波数を抽出して、FMCWレーダにおける周知の方法を用いて、レーダ波を反射した物体との距離、相対速度を求める(S110〜S140)。抽出したピーク周波数毎に、空間方向の逆FFTを実行し(S150)、誘電体レンズ31の特性によって生じるチャンネル間の損失差を補正(S160)した後、その算出結果を要素とする受信ベクトルから求めた相関行列を用いてMUSIC処理を実行し(S170)、その処理結果であるMUSICスペクトルからレーダ波を反射した物体が位置する方位角度を算出する(S180)。
(もっと読む)
追尾装置
【課題】角度バイアス及び距離バイアス推定精度の高精度化と、バイアス推定の演算時間の高速化を図ることができる追尾装置を得る。
【解決手段】センサ群10、観測値が同一目標から得られた観測値であるかを判定し、同一目標からの観測値の集合を蓄積する観測値データベース30、データベースから同一目標からの観測値を抽出する観測値出力制御処理部40、推定すべき全バイアス成分を、複数組割り当てるバイアス成分組割当処理部50、割り当てられたバイアス成分組毎に設けられた、バイアス成分組初期値設定処理部、バイアス成分組推定処理部及びバイアス成分組収束判定部、バイアス成分組毎のバイアスベクトル推定値とその誤差共分散行列を時系列に蓄積するバイアスデータベース90を備える。
(もっと読む)
レーダ干渉回避装置、及びレーダ干渉回避方法
【課題】互いのレーダ装置が干渉するか否かを確実に判断でき、干渉すると判断したときに対策を講じることによって、対象物の正確な情報を測定することのできるレーダ装置を提供する。
【解決手段】他車両と無線通信することによって当該他車両に搭載されたレーダから放射される電磁波が到達する領域、及び周波数帯域などの情報と、自車両に搭載されたレーダの電磁波の到達する領域、及び周波数帯域などの情報に基づき、自車両に搭載されたレーダと他車両に搭載されたレーダとが干渉する可能性があると判断したときに、互いのレーダから放射される電磁波を干渉しない状態に変更する。
(もっと読む)
レーダ装置、及び測定方法
【課題】レーダ装置を検査、又は調整するための作業領域を縮小でき、且つ短時間で検査、又は調整することのできるレーダ装置を提供する。
【解決手段】対象物の相対距離、相対速度、及び方位角などの相対位置を測定するときは、予め定められた期間、及び予め定められた周波数差で周期的に増減する周波数で送信信号を生成して送信し、送信された送信信号と、当該送信信号が対象物で反射した反射信号に基づき相対位置を測定する。一方、外部から検査、又は調整をする指示が与えられたときは、前述の期間に対する前述の周波数差の比を大きくしてから送信信号を生成して送信し、送信された送信信号と、当該送信信号に対する反射信号に基づいて対象物の方位角を測定する。
(もっと読む)
検査システム
【課題】コストダウンできる検査システムを提供すること。
【解決手段】電波を送受信することにより得られる検出結果に基づき、その電波を反射した物標に関する物標情報を求めるミリ波レーダ装置70に対し、予め規定された複数の検査項目で検査を実行することにより、ミリ波レーダ装置70の性能を検査する検査システムであって、検査に必要な検査機器であるリフレクタ114が設けられた複数の検査ユニット11〜14と、複数の検査ユニット11〜14間でミリ波レーダ装置70を搬送する搬送装置113と、複数の検査ユニット11〜14に対して第1〜第4導波管21〜24、連結導波管25を介して共通に設けられるターゲット模擬装置40と、複数の検査ユニット11〜14のうちターゲット模擬装置40での検査を実行する検査ユニット11〜14を切り替えるスイッチ30とを備える。
(もっと読む)
レーダ装置制御方法、レーダ装置、移動体および送受信装置
【課題】他の移動体の相対向きを算出することができるレーダ装置制御方法、レーダ装置、移動体および送受信装置を提供すること。
【解決手段】移動体の所定の位置に設置された複数の送受信部が、移動体番号と設置位置番号とを含む信号を送信し、他の移動体に設置された複数の送受信部から送信される信号を受信した場合に、信号を受信した受信部、信号を送信した他の移動体、信号を送信した送信部が設置されている位置を特定することにより、他の移動体の相対向きを算出する。
(もっと読む)
361 - 380 / 873
[ Back to top ]