
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
461 - 480 / 535
レーダ装置
アンテナビームの組み合わせから得られる複数の目標の方向を精度よく分離する。前記複数の方向に放射されたビームのうち、一部が重なり合う少なくとも2つのビームの受信波より前記信号検出器が算出した特徴量の組み合わせから、前記目標の方向である1次方向を算出する方向算出器と、前記方向算出器が算出した1次方向が複数存在する場合に、複数の前記1次方向の分布が所定の密度以上となる領域からその領域に属する1次方向に基づいて真の目標の方向である統合方向を算出する方向統合器を備えた。  (もっと読む)
(もっと読む)
レーダ装置

【課題】 FMCWレーダ装置において、干渉による影響を抑制し、安定的に、距離を求められるようにする。
【解決手段】 レーダ装置は、上り及び下り変調時の各ビート信号Xnに、干渉波成分を減衰可能な窓関数を作用させる。また、作用後の上り変調時のビート信号Xnから、相関行列Ruを算出すると共に(S310)、行列Ruと、前回算出の相関行列Ru1と、前々回算出の相関行列Ru2とを積算して行列Raを求める。これより、複数サイクル分のビート信号Xnを積算する(S320)。その後、行列RaをDFT処理し(S330)、複数サイクル分の上り変調時のビート信号の積算信号に対応するスペクトルY1を求める。また、下り変調時のビート信号にも、同様の処理を施し、複数サイクル分の下り変調時のビート信号の積算信号に対応するスペクトルY2を求める。そして、スペクトルY1,Y2からビート周波数を特定し、距離を求める。
(もっと読む)
ネットワークレーダ装置

【課題】 目標検出性能を向上するネットワークレーダ装置を得る。
【解決手段】 レーダアンテナ1a,2aの各々の位置を検出する位置検出部1b,2bと、レーダアンテナ1a,2aの各々のビーム指向方向を制御するビーム制御部1c,2cと、レーダアンテナ1a,2aの各々の位置とビーム指向方向とに基づいてレーダアンテナ1a,2aからの受信信号の到来時刻差を求め、レーダアンテナ1a,2aからの受信信号の到来時刻をその到来時刻差に応じて補正する目標距離補正部11,12と、補正されたレーダアンテナ1a,2aからの受信信号の相関処理を行い、それら受信信号の振幅値に応じて目標の有無を検出するバイナリ積分型目標検出部21とを備えた。バイナリ積分型目標検出部21において、レーダアンテナ1a,2aからの受信信号の相関処理での相関ゲートサイズを小さくすることができ、目標検出性能を向上することができる。
(もっと読む)
レーダ信号処理装置及びそれに用いるCFAR処理方法
【課題】 テストセルに対して複数の他目標信号、時間方向に拡がっているクラッタ、干渉信号等が平均化セル内に入る程度に近接して存在する場合であっても、テストセルの振幅値を低下させず、目標検出率の低下を回避可能なレーダ信号処理装置を提供する。
【解決手段】 CFAR処理器(1)1は受信信号中に含まれるクラッタ等の時間方向に拡がっている信号を抑圧する。大信号検出器2はその信号が抑圧された受信信号から閾値TH1を越える信号を検出し、大信号セル除去器3は検出された信号のセルを受信信号から除去する。CFAR処理器(2)4は大信号セル除去器3からの受信信号の平均化処理を行い、処理前の受信信号を平均化された受信信号で除算する。目標検出器5はCFAR処理器(2)4からの受信信号から閾値TH2を越えた信号を検出して目標信号として出力する。
(もっと読む)
物体検出装置
【課題】 2つの検出手段のうちの一方の検出手段で物体を検出できない場合でも検出対象の物体を設定することができる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいてレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、2つの検出手段2,3の一方の検出手段で過去に同一物体と判断した物体を検出できない場合、当該過去に同一物体と判断した物体に設定された情報から求めた予測移動軌跡と他方の検出手段で検出した物体の位置情報とに基づいて同一物体か否かを判断することを特徴とする。
(もっと読む)
レーダ装置及び測角方法
【課題】ディジタルビームフォーミングを行うレーダ装置において、測角精度に優れたレーダ装置を提供する。
【解決手段】マルチビーム形成器(2)7は、メモリ3に保持されている受信信号から同時並列に角度方向に並べた複数の測角用受信ビームパターンB1〜BNを形成し、各ビームに対応した角度毎に受信信号を出力する。平均値減算器は、角度毎に着目する角度の前後の予め定めたサンプル数の角度の振幅値の平均値を算出し、着目する角度の振幅値から減算する。最小値検出器は、平均値減算後の各角度の振幅値の中の最小の振幅値を検出する。TH比較器(2)は、検出された振幅値と予め定めたスレッシュホールドTH2とを比較して、TH2よりも小さい場合に目標信号と判定し、そのビームの角度を測角値として出力する。
(もっと読む)
レーダ信号処理装置
【課題】物標からの反射波の距離減衰などに応じて相関行列を適切に推定することの出来るレーダ信号処理装置の提供
【解決手段】物標からの反射波を受信信号S2として受信して、所定の観測信号S3をそれぞれ出力する複数の観測手段OB、各観測信号から、受信アンテナからの距離r1,…,rnに対応した距離成分XRp(r1),…,XRp(rN)を抽出する距離成分抽出手段DS、抽出された各距離成分を集め、それら各距離成分に対応した相関行列推定値Rxxqを、指数平滑型相関行列推定法を用いて各距離成分に対応した忘却係数αをパラメータとする形でそれぞれ演算推定する相関行列推定手段RM、推定された相関行列推定値に基づいて物標の有無又は運動状態を推定する手段OM及び、受信アンテナ5からの距離に対応した忘却係数をそれぞれ演算決定し、相関行列推定手段に、各距離成分に対応した忘却係数として出力する忘却係数決定手段FFを有して構成される。
(もっと読む)
現場で目標物を検出するための方法及び装置
現場内で目標物を検出する方法が記載され、1つまたは複数のデータセットを採取するステップを含み、各データセットが、複数の正規化されたデータ要素を含み、それぞれの正規化データ要素は、現場の同じ部分に関する基準反射に正規化される現場の部分からの反射に対応する。本方法は、次に、前記1つまたは複数のデータセットそれぞれの正規化データ要素の少なくとも1つを閾値化すること16を含む。閾値化ステップ16は、各正規化データ要素を、少なくとも第1の閾値および第2の閾値に比較することを含み、第1の閾値は第2の閾値より大きい。1つまたは複数の確認走査18を閾値ステップと組み合わせて使用することも記載される。空港滑走路等の表面での異物残骸(FOD)を検出する方法を使用するレーダシステムも記載される。 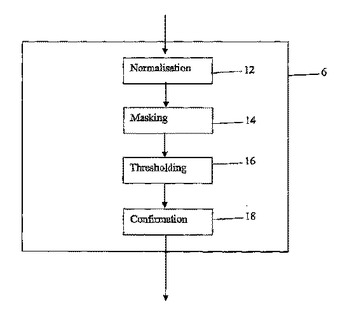 (もっと読む)
(もっと読む)
移動物体検出装置
【課題】簡単な構造で小型化が可能であり、かつ見通し範囲外でも検出可能な移動物体検出装置を提供すること。
【解決手段】移動物体検出装置は、発振回路10、送信アンテナ11、受信アンテナ13、アンプ14、検波回路12、15、16、A/D変換器19、マイクロコンピュータ20を備える。マイクロコンピュータ20は、信号を送信して受信信号値を読み込み、受信信号値が所定のレベル範囲外になった場合に移動物体有りと判定し、表示装置21に表示する。小型化が可能で安価に製作できる。また、マイクロ波や赤外線を使用した装置とは異なり、壁や樹木などの障害物がある見通し範囲外でも移動物体を検出可能であり、検出範囲、検出角度が広い。更に、検出用の信号を使用して情報を伝送するので検出結果を容易に伝送できる。
(もっと読む)
電子走査型ミリ波レーダ装置およびコンピュータプログラム
【課題】 到来波に不要な成分を含む場合においても、この不要成分を効果的に除去する電子走査型ミリ波レーダ装置を提供する。
【解決手段】 デジタル化されたビート信号をフーリエ変換し、これに基づいて所定のピッチ角度でビーム信号を生成する。次に、生成されたビーム信号から対象物の方位、距離を検出する。一方、フーリエ変換された各ビート信号から不要な信号成分を除去し、この信号を逆フーリエ変換する。そして、逆フーリエ変換された各ビート信号から対象物の方位および距離に基づいて、ビート信号に対し分離処理を行う。
(もっと読む)
レーダの軸ずれ量決定装置
【課題】 静止物標の分布に基づくレーダの水平方向軸ずれ量決定において、直線走行からカーブ走行に移行する際にも正確に軸ずれ量を決定する。
【解決手段】 検出された静止物標の2次元的な分布のデータおよび直線走行かカーブ走行かを示すフラグを現在から所定時間前まで時系列的に保持することによって(ステップ1002〜1018)、所定時間前の分布データおよびフラグをそれぞれT_Map(4)およびT_Flag(4)として保持する。現在および所定時間前のいずれにおいても直線走行していたと判定されるときのみ(ステップ1020)所定時間前の分布データT_Map(4)をA_Mapに積算し(ステップ1022)、積算値A_Mapに基いて軸ずれ量を演算する(ステップ1026)。
(もっと読む)
レーダ装置
【課題】 本発明は、装置自体の異常を精度良く判定できるレーダ装置を提供する。
【解決手段】 送信されたビームが物標から反射された反射波を受信した反射波信号に基づいて該物標を検出するレーダ信号処理部を備え、該レーダ信号処理部は、静止した物標に係る反射波信号のレベルと基準値との差分値を所定時間積算して求めた積算値と、予め設定された閾値とを比較し、該積算値が該閾値以下であるときに、レーダ装置に異常があると判定する。所定の角度で順次ビームをスキャンして送信するレーダアンテナを有する場合には、レーダ装置自体の異常、例えば、雪や泥の付着などによるレーダアンテナの感度低下を判定でき、誤判定を防止できる。
(もっと読む)
レーダ装置
【課題】ターゲットの観測値に含まれる誤差の影響を抑制することができるフィルタリング処理を実施するレーダ装置を提供する。
【解決手段】ターゲットからの反射波に基づいて求められたターゲット情報の観測値を平滑化するためのフィルタリング処理を実施するに際し、当該平滑化の特性を反射波のノイズ状態または反射波の受信電力に応じて変更する。具体的には、所定のフィルタ定数を含む演算式を用いたフィルタリング処理において、フィルタ定数をノイズ状態(ノイズレベル、SN比)や受信電力に可変に設定する。
(もっと読む)
パルスレーダ装置
【課題】漏れ電波および温度変化がある環境においても、対象物との距離をより正確に測定できるパルスレーダ装置を提供する。
【解決手段】パルス波を送信する送信部3、送信部3を制御するパルス制御部4、反射波を受信する受信アンテナ5、受信部6と、あらかじめ受信電波を遮断した状態で受信部6からの出力信号を測定温度に対応させて記憶する記憶装置7と、受信部6からの出力信号と記憶装置7の信号とを差分処理する比較器8と、パルス制御部4の出力と比較器8の出力とを比較演算し、時間遅延により対象物までの距離を算出する距離測定部9とを備えたパルスレーダ装置1において、受信部6からの出力信号と差分処理される記憶装置7の信号は、温度測定手段10の結果に基づいて、記憶装置7から選択するようにした。
(もっと読む)
標定位置算出方法
【課題】 標定レーダ装置の規模を増大させることなく、良好な精度を有する標定位置算出方法を得る。
【解決手段】 標定レーダ装置によって砲弾等の目標に対する複数の捕捉位置情報を取得し、これらの捕捉位置情報に基づいてこの目標に対する空気抗力係数及び偏流係数を算出し、分弧法による弾道計算を行なう際に、弾道方程式にこれら空気抗力係数及び偏流係数を適用しながら目標の標定位置を算出する。
(もっと読む)
アンテナ装置
【課題】 アンテナ利得をサブアンテナ数倍程度に増加させつつ、合成後のビーム幅をサブアンテナと同程度まで拡大させることができるアンテナ装置を提供する。
【解決手段】 分散配置した指向性ビームを有する複数の受信サブアンテナ1と、複数の受信サブアンテナ1のビーム指向方向を制御する統合ビーム制御器2と、受信サブアンテナ1を介して信号を受信する受信機3と、受信機3の出力信号の共分散行列を計算する共分散行列計算部5と、共分散行列の最大固有値に相当する固有ベクトルを計算する最大固有ベクトル計算部6と、固有ベクトルをウェイトとして各受信機3の出力信号に乗算する複素乗算部7と、ウェイトを乗算した各受信機3の出力信号の総和を計算して出力する総和計算部8とを有する受信用固有値ビームフォーミングプロセッサ4とを備える。
(もっと読む)
レーダ装置およびそのレーダ信号処理方法
【課題】距離と相対距離の大小関係に係わらず、距離と相対速度とを取り違えることのないレーダ装置を得る。
【解決手段】複数の算出式によりターゲットの距離Rまたは相対速度Vを算出する距離・速度算出手段303と、算出された距離または相対速度から次回観測時点における予測距離算出式を求める予測手段304と、現観測時点の距離算出式が予測距離算出式と等しいか否かを判定する相関判定手段305と、予測距離算出式と等しい場合のみに算出結果を出力するターゲット選択手段306とを備えている。予測手段304が次回観測時点における距離および相対速度と距離算出式を予測して、相関判定手段305が現観測時点の結果と予測手段304の結果について相関を判定し、ターゲット選択手段306が相関判定手段305の判定結果を受けて相関がある現時点の算出結果のみを出力する。
(もっと読む)
目標追尾装置
【課題】 広範囲のエリアから目標を精度よく探知して追尾することができる目標追尾装置を得ることを目的とする。
【解決手段】 衛星画像データ受信部2により受信された画像データを分析して、赤外線画像に含まれている目標を検出する画像データ分析部3と、受信信号処理部5より出力されたレーダ受信データから目標を検出する目標検出部6と、その画像データ分析部3の検出結果と目標検出部6の検出結果との相関を求め、相関関係が強い目標を統合するセンサ情報統合部7とを設け、そのセンサ情報統合部7により統合された目標に応じて電波送受信部4のビーム方向を制御する。
(もっと読む)
目標特定評価装置
【課題】目標のRCSの距離、向きによる変化から、特定結果を判定し、電波データなどでは絞り込めなかった、複数の目標の特定結果を絞り込み、確度の高い特定結果を可能とする目標特定評価装置を得る。
【解決手段】任意のシナリオに基づき複数の疑似的な目標を発生する疑似目標発生部25と、電波探知装置等の覆域を算出する覆域評価部26と、探知した目標の電波目標データ等を作成する目標探知模擬部100と、距離−RCSデータ等と目標特定結果の対応関係を格納するデータベースを作成するデータベース作成部33と、電波目標データ等をデータベースと比較・照合することにより目標を特定する目標特定部39と、特定結果を更新する特定結果評価部40と、特定結果を表示する結果表示部42と、特定結果を統計的に処理する特定結果処理部38と、特定結果の処理結果に基づきデータベースを更新するデータベース更新部43を設けた。
(もっと読む)
信号分類装置
【課題】 分類性能の向上した信号分類装置を得る。
【解決手段】 仮説生成手段20は、新たな信号を、どの送信源からの信号であるかを分類した追加仮説と、既に求められている保持仮説とを組み合わせ、新たな信号が放射されたと推定される送信源毎に信号を分類する仮説を生成する。評価値算出手段30は、これらの仮説に対して、各信号の出現時刻の差と継続時間との相関を考慮して定義した適合関数に基づいて、その評価値を算出する。仮説選択手段50は、仮説数減少手段40で評価値に基づいて選択された仮説に基づき、仮説生成手段20への保持仮説を送出する。
(もっと読む)
461 - 480 / 535
[ Back to top ]