
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
421 - 440 / 535
レーダー装置

【課題】
検出範囲の端部において迅速に物体を検出することが可能なレーダー装置を提供する。
【解決手段】
本発明は、所定の角度範囲に送信波を送信し、対象物に反射される反射波を受信するレーダーセンサと、受信した反射波の角度に対する強度分布から、強度のピークを求め、ピークに基づいて対象物の方向を決定する処理部とを有するレーダー装置を提供する。 処理部は、角度範囲の端部において反射波を検出し、かつ、ピークを検出しない場合、検出した反射波の強度分布から、対象物が端部の方向に存在しているかの判定を行うことを特徴とする。
(もっと読む)
周辺車両位置検出装置および周辺車両の位置予測方法

【課題】周辺車両がそれまでの動きと異なる動きをしたときでも、最終的に求める周辺車両の位置の精度を向上させることが可能な「周辺車両位置検出装置および周辺車両の位置予測方法」を提供する。
【解決手段】カメラ2による周辺車両の撮影画像を用いて、画像処理部3が周辺車両のウィンカーの点滅状態から周辺車両の移動する方向を検出し、演算部4がその検出結果に応じて周辺車両の予測位置を設定する。そして、演算部4が、その予測位置とレーダ1による測定位置との比重計算によって周辺車両の位置を算出することにより、周辺車両の実際の動きに合わせた予測位置が求められられるようにして、予測精度を向上させることができるようにする。
(もっと読む)
FM−CWレーダ装置
【課題】 隣接して複数の目標物がある場合、それぞれの目標物からの受信信号がお互い干渉して目標検出のための閾値が上がり、目標物を検出できなくなるおそれがあった。
【解決手段】 目標検出のための閾値は、目標がない状況で受信したビート信号のノイズ成分の平均値や、送受信機の温度や、受信機と地面の角度や、送受信機の利得や降雨状態をパラメータにして決定し、目標物の振幅値で閾値が左右されないようにすることで、目標物の不検出を抑えた。
(もっと読む)
レーダ信号処理装置
【課題】計算量を軽減し、実時間処理向けのパワー推定手段を有するレーダ信号処理装置の提供
【解決手段】アレー素子で捕捉された反射波から所定の観測信号をそれぞれ出力する手段OB、観測信号S3から、物標に関する観測信号成分XRをそれぞれ抽出する手段SD、観測信号成分から、観測手段間の相関特性を表す相関行列の標本値である標本相関行列Cxxを演算する手段HG、標本相関行列及び反射波の応答ベクトルから構成されるアレー応答行列(式12)から反射波についてのパワーを推定する手段PG、を有し、更に、アレー応答行列を、パワーを推定すべき所定到来方向の反射波i及び当該反射波の到来方向に近接する方位の反射波を選択して、それら反射波のみを要素に持つ近接方位アレー応答行列(式31)として演算決定する手段を有し、当該近接方位アレー応答行列に基づいて、反射波についてのパワーを推定する。
(もっと読む)
物体探知装置
【課題】比較的簡単な回路構成としながらも、対象物の材質を正確に求めることができる物体探知装置を提供する。
【解決手段】物体探知装置は、電磁波を間欠的に送波する送信器1と、対象物Aで反射された送信器1からの電磁波を受波する受信器2と、電磁波を送信してから受信するまでに要した時間および媒質B中での電磁波の速度に基づいて対象物Aまでの距離を算出する距離算出部26と、複数の周波数についてそれぞれ送信器1が送波した電磁波の強度と受信器2が受波した電磁波の強度と対象物Aまでの距離とから媒質Bおよび対象物A間の境界面の反射係数を求め、各反射係数と媒質Bの比誘電率と電磁波の各周波数とを用いて対象物Aの比誘電率を統計的に推定する比誘電率推定部28と、この比誘電率に基づいて対象物Aの材質を判断する材質判断部29とを備える。送信器1は、電磁波としてUWBの信号を送波する。
(もっと読む)
レーダ装置
【課題】広角2次元監視をおこなうモノパルス方式のレーダを用いて、物体の種別を精度よく判定しうる安価な監視レーダ装置を提供する。
【解決手段】角度計測にモノパルス方式を採用したレーダ装置を用いて、監視領域内を移動する物体上の複数の箇所における反射波を受信し、各反射波について反射箇所を計測する。そして、計測データに基づき、移動物体の位置と監視レーダ装置の測角方向における大きさを算出する。
(もっと読む)
レーダシステム
【課題】反射点の相対速度、角度の分布から角度誤差を算出することで正確な角度精度を得ることができ、また、角度誤差と軸ずれ角を同時に算出することで、軸ずれ角も含めた正確な角度精度を得ることができるレーダシステムを得る。
【解決手段】移動体に搭載されるレーダシステムであって、複数の反射体の相対速度及び方位角度を算出するレーダ装置10と、前記複数の反射体の相対速度及び方位角度に基づき、前記レーダ装置10により算出された方位角度の誤差を推定する方位角度誤差推定装置20と、前記レーダ装置10により算出された方位角度を、前記方位角度誤差推定装置20により推定された方位角度誤差で補正する補正装置30とを設けた。
(もっと読む)
車両用レーダ装置
【課題】反射強度が低下した先行車両の検知可能距離の低下を抑制し、かつ、光学設計上の制約を少なくする。
【解決手段】距離検出を行うときには発光体140での発光を行わず、受光素子82に入射される光の強度に応じた受光信号が得られるようにし、距離検出を行わないときには発光体140での発光を行い、受光素子82における受光信号成分が一定値となるようにする。これにより、距離検出を行わないときの受光信号の波形から、一定値となる受光信号成分を差し引けば、ノイズ成分のみが残ることになる。そして、このときに得られるノイズ成分をバックグランドノイズ算出回路99で求めることにより、受光信号からノイズ成分を除去することが可能となる。これにより、レーダ装置の検知可能距離が低下することを防ぐことが可能となり、光学設計上の制約も少なくすることが可能となる。
(もっと読む)
無線周波信号の同定装置
【課題】無線周波信号の同定性能を向上することのできる改良された無線周波信号の同定装置を提案するものである。
【解決手段】無線周波信号の振幅変化部分を含んだ信号部分を抜出す信号抜出手段と、振幅変化部分を含んだ信号部分における振幅変化を抽出する振幅抽出手段と、振幅変化部分を含んだ信号部分における位相変化を抽出する位相抽出手段と、振幅抽出手段で抽出された前記振幅変化と前記位相抽出手段で抽出された前記位相変化に基づき、振幅変化に対する前記位相変化を表わす振幅対位相特性を無線周波信号特徴パターンとして出力する信号特徴パターン出力手段を有する無線周波信号特徴抽出手段を使用する。または、位相検出手段の出力から瞬時周波数特性を無線周波信号特徴パターンとして出力する信号特徴パターン出力手段を有する無線周波信号特徴抽出手段を使用する。
(もっと読む)
合成開口レーダー
【解決手段】 合成開口レーダーを低PRFモードで動作させる方法は、レーダー・パルスのストリームを生成し、ストリームにパルス繰り返し周波数(PRF)の所定の調整を施し、ストリームを目標領域へと向け、受信したパルスを処理する、ことを具備し、受信したパルスを一連の組として分けることと組の受信したレーダー・パルスを重畳して中央の受信ローブを増強するとともにサイド・ローブを減衰させることを具備する。 (もっと読む)
合成開口レーダ画像による目標物識別方法及び装置
【課題】2次元SAR画像における倒れ込み現象による影響を除去し目標対象の識別精度を向上させる。また、目標の領域そのものを精度良く決定し識別精度を向上させる。
【解決手段】本発明の目標物識別装置は、SAR部161(合成開口レーダ部)と、レーダ反射信号をSAR部161から入力し2次元SAR画像を生成するSAR画像取得部162と、SAR画像の中から目標物を切り出す対象切り出し部163と、切り出された目標物の特徴量を計算する特徴計算部164と、モデルを記憶するモデル記憶部167と、目標物の特徴がモデルの特徴と合致するか否か識別する対象識別部165とを備える。対象識別部165は、飛翔体の飛翔方向及び目標物の姿勢に依存して目標物の2次元レーダ画像上に現れる変形(倒れ込み)を考慮し、反射強度分布をレーダ照射方向に射影して、目標物の特徴が、モデルの特徴と合致するか否か識別する。
(もっと読む)
物体探知装置
【課題】探知対象物体の大きさや形状に関係なく探知対象物体を確実に検知することができる物体探知装置を提供する。
【解決手段】各受波期間内の受信信号のサンプリングデータを格納するメモリ43と、メモリ43に格納されている受波期間内の同サンプリングタイミングのサンプリングデータに関する標準偏差を求める標準偏差演算手段44aと、標準偏差演算手段44aにて求めた標準偏差と予め設定された閾値とを比較する比較手段44bと、比較手段44bにおいて標準偏差が閾値に達したときのサンプリングタイミングまでの各受信信号に基づいて雑音成分を求める雑音成分演算手段44cと、各受信信号から雑音成分を取り除いた信号を信号成分として求める信号成分抽出手段44dと、信号成分抽出手段44dにて抽出された信号成分に基づいて探知対象物体Obの有無を判断する判断手段44eとを備える。
(もっと読む)
パルス列の解析
受信パルス列内の相対的に高レベルのパルスが選択される。そのようなパルス毎に、選択されたパルスの前後両方において、他のパルスが均一な間隔で生じるか否かが判定される。そうである場合には、関連するパルスが、或る特定のグループに属するものとして分類される。パルス間間隔の正確な計算は、選択されたパルスに対するパルスの到来時刻から繰返し間隔を算出し、その後、重み付けされた角度平均を求めることによって実行される。  (もっと読む)
(もっと読む)
物体検出
状態の不規則な系列を有し、状態間の遷移が名目的に規則的なクロックに対して変化する時間オフセットにおいて生じる2値信号を生成することによって物体が検出される。この2値信号は送信され、送信された信号の反射が、2値信号の基準バージョンで処理される。基準信号を遅延した後、それを用いて反射した信号をサンプリングする。それらのサンプルを用いて、基準信号の遷移の時刻に実質的に対応する位置における反射した信号の平均時間導関数を表す合成値を導出する。その合成値から、その遅延に対応する距離における物体の存在が確定される。  (もっと読む)
(もっと読む)
相関及び微分相関の合成に基づく信号処理及び時間遅延測定
状態の不規則な系列を有する2値信号の2つのバージョンが、(i)一方の信号の遷移の時刻において他方の信号の平均時間導関数を表す第1の値と、(ii)2つの信号の相関値とを導出し、その後、第1の値と相関値とを合成することによって処理される。それらの信号間に導入される所与の相対的な遅延に対して、結果として合成された値は、導入された遅延によって、2つの信号の遷移が同時に発生するか否かを示す。その過程は、他の導入された遅延に対しても繰り返され、2つの信号間の遅延の量を求めることができる。 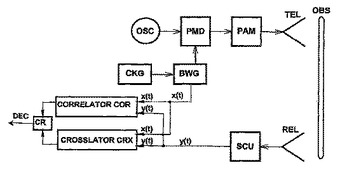 (もっと読む)
(もっと読む)
位置測定方法及び位置測定装置
【目的】 複数の広角レーダ装置を用いて目標物の位置測定する場合において位置測定精度を向上する「位置測定方法及び位置測定装置」を提供することである。
【構成】 複数の広角レーダ装置を用いて目標物の位置を測定する場合、各広角レーダ装置は、目標物を含む複数の物体を分離することが不可能になったとき該広角レーダ装置から出力する位置データにフラグを付加し、位置決定部は、各広角レーダ装置から出力されるいずれの位置データにもフラグが付加されていなければ、各広角レーダ装置から出力される位置データを用いて加重平均により目標物の位置を決定し、いずれかの位置データにフラグが付加されていれば、該位置データを除外して目標物の位置を決定する。
(もっと読む)
目標物の位置測定方法および位置測定装置
【目的】 広角レーダ装置において測定誤差の度合を示す値を出力できる「目標物の位置測定方法および位置測定装置」を提供することである。
【構成】 広角レーダ装置において、目標物の現在位置、速度、移動方向に基づいて所定時間後の目標物の位置を予測し、ついで、所定時間後の目標物の位置を測定し、該予測点と測定点を用いて目標物の現在位置を決定し、該現在位置と前記測定点位置との差を累積して測定誤差の度合を示す値を出力する。現在位置を決定するに際して、測定点までの距離に応じた第1の重みと測定誤差の度合に応じた第2の重みを考慮し、予測点と測定点を用いて目標物の現在位置を決定する。
(もっと読む)
信頼度算出装置
【課題】所定領域に判定対象として予め定めた物体が存在するか否かを正確に判定する。
【解決手段】障害物認識装置では、障害物探索手段24は、受信信号取得手段32により取得された所定領域からの信号に基づいて、所定領域内に存在すると予想される歩行者からの反射信号を検出し、特徴量抽出手段36は、反射信号の強度を抽出し、存在確率算出手段40は、予め求めた物体からの反射信号の特徴量モデルと上記抽出された特徴量とに基づいて、物体の存在確率を算出し、不存在確率算出手段44は、ノイズ信号の特徴量モデルと上記抽出された特徴量とに基づいて物体の不存在確率を算出する。信頼度算出手段46は、算出された物体の存在確率と物体の不存在確率とに基づいて、検出された反射信号の信頼度を算出する。
(もっと読む)
測距装置、及び測距方法
【課題】 測距精度を向上することができる測距装置及び測距方法を提供する。
【解決手段】 所定の周期でパルスを有する無線信号を送信する送信部2と、送信部2から送信された直接波8及び対象物により反射された反射波9を受信する受信部3と、受信部3で直接波8が受信されてから反射波9が受信されるまでの時間である到達時間差を計時する時間差取得部46と、時間差取得部46により計時された到達時間差に基づいて、測距装置1から測距対象物10までの距離を算出する距離算出部47とを備えた。
(もっと読む)
航跡生成システム、その誤差共分散行列初期値設定装置、航跡生成方法およびその誤差共分散行列初期値設定方法
【課題】誤差共分散行列初期値として適切な値を算出し設定することによって、航跡を生成した直後における航跡諸元の精度および安定性を向上させる。
【解決手段】所定状態および誤差共分散行列の初期値を設定してその後の状態および誤差共分散行列を推定するカルマンフィルタを用いたシステムにおける前記誤差共分散行列の初期値を設定する誤差共分散行列初期値設定装置10において、前記誤差共分散行列初期値を、時間が経過するとともにある観測値が入力されるだろうと想定して状態の誤差を適切な値へ収束させる誤差共分散行列初期値収束手段14を有する。
(もっと読む)
421 - 440 / 535
[ Back to top ]