
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
481 - 500 / 535
未知の障害物の中の予測不可能な目標物の実時間追跡
本発明の実施例は、環境内の障害物の配置についての事前の知識を必要とせず、ロボットが追跡する目標物の軌跡も知らずに、障害物のある環境内で動作する移動ロボットの運動を計算するための計画を提供する。本発明の実施例は、目標物の位置と環境内の障害物の位置の測定結果に基づいて、監視ロボットの運動を支配するアルゴリズムを提供する。アルゴリズムは目標物と障害物によって作られた監視者の視野領域との間の幾何学的配置を計算によって記述し、この記述を用いて連続的な制御則を計算する。本発明の実施例は、逃走経路ツリーデータ構造を使用して目標物の監視ロボット検出器からの逃走について起こり得るモードを分類し、逃走経路ツリーを用いて目標物の最短逃走経路を決定する。 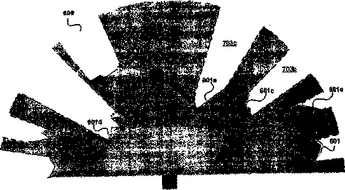 (もっと読む)
(もっと読む)
移動予測表示装置およびレーダシステム
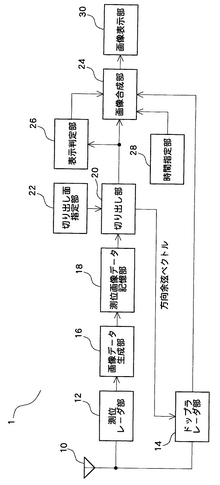
【課題】様々な形状の物標についても、観測者が物標の移動予測結果を把握することが容易である移動予測表示装置およびレーダシステムを提供する。
【解決手段】画像データ生成部16は、測位レーダ部12で取得された測位データに基づいて画像データを生成し、測位画像データ記憶部18に入力する。切り出し部20は、観測しようとする面、すなわち切り出し面のデータを測位画像データ記憶部18から取り出し、画像合成部24および表示判定部26に入力する。表示判定部26は、物標の像が移動する様子によって物標の移動予測の結果を表示することが可能であるか否かの判定を行う。一方、ドップラレーダ部14は、切り出し面内での物標の移動速度を算出し、画像合成部24に入力する。画像合成部24は、表示判定部の判定結果に従って物標の移動予測の結果を表示する画像データを生成し、画像表示部30に入力する。
(もっと読む)
気象レーダ装置

【課題】 降雨量に関わらず、精度の高い降雨強度算出が可能な気象レーダ装置を得る。
【解決手段】 Kdpデータ有無判定回路103は、1レンジ前の観測メッシュ(r−1)における、垂直および水平偏波の反射波の伝播位相差の微分値から得られた降雨強度データR(Kdp)(r−1)115が、観測可能な最低降雨強度以上の場合にはR(Kdp)(r−1)115を、最低降雨強度より小さい場合には、平均受信電力値により算出した降雨強度R(dBZ)(r−1)119をR(r−1)116として受信強度補正値算出回路105に供給し、受信強度補正値算出回路105は、R(r−1)116を用いて途中降雨減衰補正値を算出する。得られた途中降雨減衰補正値を用いて観測メッシュ(r)における平均受信電力値を補正し、受信強度データ降雨強度算出回路107は、補正した平均受信電力値を用いて降雨強度を算出する。
(もっと読む)
FMCWレーダ装置
【課題】他のレーダ装置との干渉の発生を精度良く判定することが可能なFMCWレーダ装置を提供すること。
【解決手段】対象物を検出すべき検出距離範囲に対応する周波数よりも高い高周波領域に属する周波数成分も出力されるように、上昇区間ビート信号及び下降区間ビート信号に対して高速フーリエ変換処理を行う。周波数上昇区間及び周波数下降区間のビート信号の周波数スペクトルデータを用いて、所定の高周波数範囲に属する周波数成分の強度の積分値を求め、いずれかの強度積分値が干渉判定閾値を越えている場合に、他のレーダ装置との干渉が発生したと判定する。
(もっと読む)
生物検出装置
【課題】マイクロ波を用いて生物を検出する場合に、その検出性能を高めるようにする。
【解決手段】 マイクロ波センサ1は、送信信号vtと、生物22により反射された結果得られる受信信号vrとの位相差を利用して受信信号vrを直交検波することで、直交検波出力信号(信号vi,vq)を出力する。直交検波出力信号は増幅/フィルタ部2とノイズ処理判定部3とを介して信号I,Qとしてノイズ処理部5に供給される。ノイズ処理部5は、この信号I,Qを利用して、直交検波出力信号を構成する2つの信号のうちの一方の信号と同相または逆相のノイズ成分に対するノイズ処理を実行する。これにより、ノイズ処理後の信号vmが得られる。検出判定処理部6は、このノイズ処理後の信号vmを利用して生物22を検出する。本発明は、マイクロ波センサを利用する食害虫検出装置に適用可能である。
(もっと読む)
無線受信機におけるDCオフセット補正装置及び方法
【課題】 効率よく正確にDCオフセットを算出し、受信信号を補正して、受信利得の劣化を防止することができる、無線受信機におけるDCオフセット補正装置及び方法を提供する。
【解決手段】 無線受信機における受信信号に対してDCオフセット成分を除去する補正を行う装置が、DCオフセット成分算出対象範囲の中心となる基準値を決定する基準値決定部28と、その基準値決定部28によって決定された基準値を中心に一定の範囲幅を設定することにより、DCオフセット成分算出対象範囲を指定する範囲指定部30と、その範囲指定部30によって指定された範囲内に存在する受信信号に基づいてDCオフセット成分を算出し、受信信号全体から該DCオフセット成分を減算するDCオフセット減算部32と、を具備するように構成される。
(もっと読む)
構造物内部の異常箇所候補抽出方法およびプログラム
【課題】 構造物内部のレーダ計測データにより、コンピュータによる透過映像を得るまでの計算時間の削減と、オペレータによる透過映像を診断する労力の軽減、そして計測から診断結果出力までの時間短縮を目的とする。
【解決手段】 地中レーダを用いて構造物内部検査を行い、前記地中レーダの反射信号から内部構造の画像再生を行うに際し、反射強度分布から閾値により正常箇所を除去することにより異常箇所候補領域を抽出し、当該異常箇所候補領域とそこに含まれる反射強度より、異常の度合いを示す評価値を得て、異常箇所候補領域の位置を評価値で順位付けして、像再生処理に必要な計測データの切り出し場所を特定し、特定領域についての像再生処理を行う。
(もっと読む)
周辺監視装置
【課題】 ドップラーセンサ1を用いて、該ドップラーセンサ1の設置位置周辺に位置する移動物体の動きを監視する場合に、外乱周波数が存在する環境下にあっても、監視すべき移動物体(特に人)の動きを正確に把握できるようにして、該移動物体の車両Cの車室内への侵入等を正確に予測できるようにする。
【解決手段】 FFT解析部13にてFFT解析により周波数レベルが求められた全バンド幅のうち所定の周波数範囲の最大及び最小周波数を含むバンド幅を除く少なくとも1つが、第1の設定レベル以上の周波数レベルとなる特定バンド幅である場合において、該特定バンド幅に対して周波数の高い側及び低い側にそれぞれ隣接する2つのバンド幅の周波数レベルが共に、上記第1の設定レベルよりも低い第2の設定レベル以下であるときには、外乱周波数除去部14にて上記特定バンド幅の周波数レベルを低下させる。
(もっと読む)
到来時刻推定装置
【課題】 受信信号と参照信号の周波数が一致していない場合でも、電波の到来時刻を推定できるようにする。
【解決手段】 受信信号サンプリング部1により受信された信号の時間波形から共分散行列を生成する受信信号共分散行列計算部2と、空間に周期的に発信された信号の時間波形から到来時刻と周波数シフト量の関数であるモードベクトルを計算するモードベクトル計算部3とを設け、その受信信号共分散行列計算部2により計算された共分散行列とモードベクトル計算部3により計算されたモードベクトルを用いてMUSIC処理を実施することにより、受信信号サンプリング部1により受信された信号の到来時刻を推定する。
(もっと読む)
レーダ信号処理装置
【課題】 船舶などの目標を正確に検出することができるレーダ信号処理装置を得ることを目的とする。
【解決手段】 ASDEから出力されたレーダビデオのスレッショルドレベルを算出し、そのスレッショルドレベルより大きい振幅を有するレーダビデオを検知するヒット検定処理部6を設け、ヒット検定処理部6により検知されたレーダビデオに含まれているクラッタを縮小化する収縮処理を実施し、収縮処理後のレーダビデオに対する2次元移動平均処理を実施してノイズレベルを算出し、そのレーダビデオとノイズレベルを比較して目標とクラッタを区別する。
(もっと読む)
車両用センサシステム及び方法
【課題】目標パラメータを効率的に決定して動作速度を上げ、計算経費を最小にし、RF放出を低減する車両検知システムの提供。
【解決手段】物体の目標パラメータを決定する方法は、(a)一連の射程距離から目標射程距離を定める工程と、(b)初期ドエル時間に目標射程距離にドエルしてセンサデータを得る工程と、(c)目標射程距離での物体の有無の確率密度分布に基づいて、センサデータが目標射程距離での物体ありに対応するか、物体なしに対応するかを決定する工程と、決定できない場合は決定できるまで工程(b)及び工程(c)を繰返し、(d)センサデータが工程(c)で決定した物体の存在に対応する場合、延長ドエル時間で目標射程距離にドエルし、工程(e)に進む前に物体の目標パラメータを決定する追加センサデータを得る工程と、(e)工程(b)〜工程(e)を繰り返す前に、目標射程距離として次の一連の射程距離を定める工程とを具備する。
(もっと読む)
レーダ装置
【課題】移動物体の高精度な距離情報の取得を可能にするレーダ装置を提供する。
【解決手段】レーダ装置は、レーダパルス送信手段1と、レーダパルス受信手段2と、受信した複数のレーダパルスを積分検波することによりこれらを複数のレーダパルス応答信号に変換するレーダパルス送受信制御手段3と、複数のレーダパルス応答信号の各々について時間的に隣接するものの間の差分に基づく信号を抽出することにより各々が移動物体の信号成分からなる複数のレーダパルス応答差分信号を検出する移動物体検出手段4と、複数のレーダパルス応答差分信号の各々についてリンギングを用いて移動物体の粗い位置を検出する移動物体粗位置検出手段5と、検出された移動物体の粗い位置に基づいて予め定められた規則に従って移動物体の正確な位置を検出する移動物体精位置検出手段6とを備える。
(もっと読む)
目標検出方法
目標を識別するためにレーダーシステムのようなセンサーからの反射を処理する方法が提供される。本方法は、よりよい識別能力を与えるために、数回の走査からのデータを集積するために、検出前トラックルーチンを使用する。しかながら、検出前トラックルーチンの実行においては、多数の目標の動きが仮定され、この様な動きを説明するために、データが組み合わせられる。閾値以上の結果は、目標が存在し、仮定された速度で移動することを示す可能性がある。正確な目標動き仮定で組み合わされたデータは、一時的な雑音および反射妨害よりもより持続性があるので、本方法は、より正確な目標検出を提供する。一旦目標が識別されると、それは、別の探索においてデータセットから取り除かれることが好ましい。 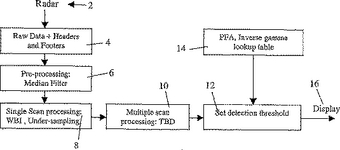 (もっと読む)
(もっと読む)
干渉型レーダー
【課題】一般のレーダーと異なり、送信信号はパルスではなく、CWまたはFMCW信号であるため、レーダー用ではない一般通信用の送信モジュールを使用することができる。
【解決手段】目標対象物に向けて信号を送信する送信部Tと、目標対象物で反射する反射波を受信する受信部Rとを有している。前記送信部Tは、目標対象物の方位及び速度を検出するためのCW信号を送信アンテナ7から出力する。前記受信部Rは、前記送信部Tからの送信と同時に、目標対象物で反射した反射波を複数台の受信アンテナ8で受信し、受信信号に対してスペクトル解析を行い速度成分ごとの受信信号に分類する機能と、受信アンテナ系統の信号間の相関する機能と、前記相関処理された信号を積分する機能と、受信アンテナ間の信号の位相差からアンテナ面に入射する信号の位相面を求めて、その出力を2次元FFTしてターゲットの方位方向及び速度を計測する機能とを実行する。
(もっと読む)
レーダー装置のマルチパスによる疑似目標の判定方法及びこの判定方法を用いたレーダ監視装置
【課題】 レーダーの受信信号に含まれる不要信号のうち、レーダーから目標へ引いたいわゆるレーダー視線上の遠方側(レーダーと反対側)に発生するマルチパスエコーによる擬似目標を誤目標として識別する適当な方法がなかつた。
【解決手段】 得られた目標情報と、既に追尾している追尾目標とを1対1に対応付ける相関処理を行なう相関処理手段81を設ける。そしてどの追尾目標とも対応がない目標情報は新たな追尾目標とする。一方、レーダー視線上の目標情報の手前側(レーダー側)に既存の追尾目標4が存在し、尚且つ、当該目標情報を仮の追尾目標として追尾した結果が、マルチパスエコーによる擬似目標の固有のパターンを示すか否かを判定するマルチパス判定手段82を設け、固有のパターンを示すと判定した場合は、誤目標として棄却する。
(もっと読む)
同一航跡判定装置
【課題】航跡作成装置が異なるセンサであっても、処理負荷を削減し、なおかつ、それまでに得られた信頼度を蓄積し、多くの航跡が密集した状態等、位置運動情報(航跡間の距離及び速度)に差がつかない状況においても、安定した確度の高い相関結果を得ることのできる同一航跡判定装置を得る。
【解決手段】従来の同一航跡判定装置の位置相関判定器7に目標類識別データ選択器11および目標類識別相関判定器12を取りつけ、位置相関判定で絞り込まれた相関の可能性がある航跡対を、目標特徴量から類推される目標類識別結果を用いてさらに絞り込む。次に従来の同一航跡判定装置の尤度算出器14に信頼度算出器15を、信頼度算出器15に信頼度記憶器16を取りつけ、航跡データ対についての信頼度を尤度算出器14で算出された尤度、及び信頼度記憶器16に記憶されている1サンプリグ前の信頼度を用いて算出する。
(もっと読む)
風計測方法及びその装置
【課題】 低サンプリングレートのA/D変換器を用いて、広い測風速範囲に対応した風計測装置を実現する。
【解決手段】 照射したビームの大気による反射波のドップラー周波数を用いて遠隔地点の風速を計測する場合に、反射波の受信信号をディジタル変換するサンプリングレートでサンプリング可能な周波数を、ビーム照射方向と風向とのなす角によって変動する反射波のドップラー周波数が超過しない範囲の方角(例えば方角101、103、105など)から複数のビーム照射方向を選択し、選択された複数のビーム照射方向のドップラー周波数を組み合わせて、風速を計測する。
(もっと読む)
チャンネルインパルス応答の推定方法
時間に依存するチャンネルのインパルス応答を推定するために、超音波信号等の連続的なインパルス信号が送信され、上記チャンネルから受信される対応する信号がサンプリングされる。インパルス信号の行列の逆行列が計算され、上記受信信号のサンプルへ適用される。  (もっと読む)
(もっと読む)
目標追尾装置
【課題】検出信号の電力情報を用いて、目標の検出追尾精度の向上を図った目標追尾装置を得る。
【解決手段】追尾目標に対する受信信号から検出信号情報を生成する検出信号情報生成手段11と、検出信号情報履歴データおよび目標航跡データを蓄積するデータ記憶部13と、特定された検出信号群の電力積分結果を算出する信号電力積分手段14と、検出信号情報および目標航跡データに基づいて航跡の仮説群データを作成して、仮説群データの中から検出信号群を特定し、対応する電力積分結果を受け取り、種々の検出信号群に対する電力積分結果に基づいて仮説群データを修正して仮説群修正データを生成し、データ記憶部13の目標航跡データを更新する航跡作成手段12と、更新された目標航跡データに対して、所定の判定基準を満たすものを真の目標航跡として特定する目標判定手段15とを備える。
(もっと読む)
後方散乱に基くトランスポンダの位置を測定する方法
本発明は、後方散乱に基くトランスポンダの位置を測定する方法に関する。本発明に寄れば、この方法は、基地局(BS1)により不変調搬送波信号(TS)を送信し、トランスポンダ(TR1)が基地局(BS)の応答範囲へ入る時、基地局(BS1)から送信される搬送波信号(TS)の位相変調及び後方散乱により発生される位置測定信号(OS)を、トランスポンダ(TR1)により送信し、位置測定信号(OS)に基いてトランスポンダ(TR1)の位置を測定する段階を含んでいる。例えば物品経済組織における使用。 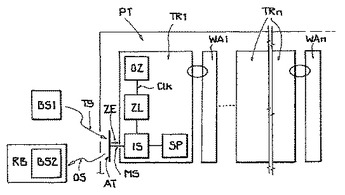 (もっと読む)
(もっと読む)
481 - 500 / 535
[ Back to top ]