
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
381 - 400 / 535
レーダ装置

【課題】反射物のピーク波形を適切に抽出することができるレーダ装置を提供する。
【解決手段】ステートマシン部89では、積算処理部88から出力される積算信号の一定時間毎の信号成分を示す各ポイントについて、積算信号の波形の形状においてどの状態にあるかを判定し、その判定したポイントのうち、特定の状態遷移をたどる複数のポイントからなるポイント系列を、反射物からの反射波を受信したことを示すピーク波形を形成するグループであると判定する。距離算出部94では、このピーク波形を形成するグループに属するポイント系列の積算信号を抽出して、反射物までの距離を算出する。
(もっと読む)
FMCWレーダセンサ
本発明は、複数のアンテナ素子(10)と、ランプ状に変調された周波数(fe、fe+Δf、fe+2Δf、fe+3Δf)を有する送信信号を複数のアンテナ素子に供給するための給電回路(14)と、を備え、個々のアンテナ素子に供給される送信信号が特定の周波数オフセット(Δf)を有する近接場モードと、送信信号の周波数(fe)が同一である遠距離場モードとの間で給電回路を切り替えるための切替え装置(28)を特徴とする、FMCWレーダセンサに関する。
 (もっと読む)
(もっと読む)
物体識別システム

【課題】より効率的に物体の種別を識別する「物体識別システム」を提供する。
【解決手段】物体領域抽出部3は、カメラ2が撮影した画像中から物体が写り込んでいると推定される領域を抽出し、抽出した領域の大きさと位置から、当該物体の幅を算定する。存在確率算出部8は、レーダ装置1が測定した当該物体の反射強度と算定された物体の幅との組み合わせに基づいて、複数の種別の各々について、当該物体が当該種別の物体である確率を算出する。物体認識部4は、物体の種別毎に対応して設けた、対応する種別の物体識別用の画像認識処理のうちから、算出された確率が所定のしきい値よりも大きかった種別に対応する画像認識処理を選定して、抽出された領域に対して実行し当該物体を識別する。
(もっと読む)
電子支援計測システムにおける方法、当該方法の使用および装置
本発明は電子計測システム/方向探知装置(ESM1)によって検出される複数の見かけの放射源により放射される信号を処理する方法及び装置に関するものである。前記装置は、見かけの放射源の各々の放射源特徴パラメータの分散に基づいて、前記見かけの放射源の中の真の放射源(21;31;41)および少なくとも1つの偽の放射源を識別するのに適している。偽のおよび真の放射源が識別されると、この情報は偽の放射源による混乱の抑制するためおよび/または1台のESM/DF装置のみによる観測値を使用して真の放射源の位置を決定するために用いられ得る。 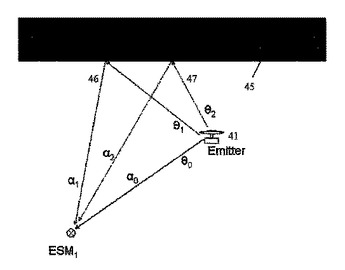 (もっと読む)
(もっと読む)
車両用障害物検知装置
【課題】分離や合体などの誤認識が生じにくい車両用障害物検知装置を提供する。
【解決手段】レーダ装置からスキャン角度毎に供給される検出強度変化データに基づいて、送信波の照射方向における距離に対する障害物の存在確率分布を決定する(S10)。この確率分布は、ピークを最高確率とするが、ピークの前後に最高確率から漸減する範囲を有している。そのため、最高確率位置と実際の障害物までの距離との間に誤差があったとしても、実際に障害物が存在する位置の確率がゼロとなる可能性は低くなり、完全な誤検出が減少する。従って、誤検出によって生じる分離・合体などの誤認識が生じにくくなる。さらに、その確率分布に基づいて第1存在確率関係を作成し(S30)、その第1存在確率関係と第2存在確率関係とを合成して、最新の合成存在確率関係を作成する(S60)。これを用いて物体認識を行うことにより、さらに誤認識を減少させることができる。
(もっと読む)
インパルスレーダ
【課題】リアルタイムデータ収集機能に優れ、近接する複数の物標に対する検知信号の距離分解能を向上させたレーダを提供する。
【解決手段】インパルス波を放射する送信アンテナと、前記送信アンテナから放射されたインパルス波の反射波を受信する受信アンテナと、前記受信アンテナで受信した受信信号をA/D変換して得られた受信データから物標で反射した反射波を特定する演算処理手段と、を有し、前記演算処理手段は、前記受信データを周波数領域においてサブアレイ化し、その空間平滑化共分散行列を求めてMUSIC法を用いた信号処理を行う。
(もっと読む)
画像レーダ装置
【課題】雑音や他の反射点の影響を低減しながら、位相やレンジの補償誤差を低減することができる。
【解決手段】移動する目標に対して電波を送信し、前記目標からの反射波を受信して、レンジプロフィールの時間履歴であるレンジヒストリを生成し、前記レンジヒストリのクロスレンジ圧縮により前記目標の画像を得る画像レーダ装置であって、レンジヒストリのドップラ周波数の時間変化の原因となる位相変化を推定して補償するための位相補償量を推定するための参照データ列を切り出しする低干渉参照データ抽出手段8を備え、低干渉参照データ抽出手段8は、参照データ列を切り出しする際に、レンジヒストリをレンジ方向に補間して、補間後のデータから最適な参照データ列を抽出するレンジ補間手段を有している。
(もっと読む)
インパルスレーダ
【課題】ノイズ対策を十分に施したMUSIC法による信号処理を行うインパルスレーダを提供する。
【解決手段】送信アンテナから放射されたインパルス波の反射波を受信アンテナで受信し、この受信信号をA/D変換して得られた受信データから物標で反射した反射波を求める演算処理手段と、を有し、前記演算処理手段は、MUSIC法を用いた信号処理を行う第1演算部と、前記受信データを周波数領域においてデータ列に区分を設け、区分けしたデータ列の位置を数次ずらして新たなデータ列を複数作成するサブアレイ化処理を行う第2演算部と、第2演算部によるサブアレイ化処理により作成された複数の各データ列に基づいて空間平滑化共分散行列を求めて前記第1演算部に出力する第3演算部とを有し、前記第2演算部は前記データ列の数であるデータ数を調整可能とする。
(もっと読む)
媒質内の物体の計測方法
【課題】鉄筋の設置深度及び直径を電磁波レーダを使用した非破壊的手段で計測する。
【解決手段】電磁波レーダの物理的特性と媒質界面における反射及び屈折を含めた伝播特性に基づく予測受信信号波形を予め作成し、電磁波レーダを測定対象物の表面に沿って走査させて測定した実際の受信信号とのパターンマッチングによって媒質内の物体の位置及び物体の形状、及び媒質の比誘電率を計測するものである。電磁波レーダ2をコンクリート1の表面10にセットし、走査させて反射波を受信し、未知パラメータを設置深さ(d)、鉄筋径(a)、及び比誘電率(ε)として受信信号波形とモデル波形の最適パターンマッチングをおこない、鉄筋のかぶり及び直径を精度よく測定する。
(もっと読む)
パルスレーダ装置
【課題】所望の対象物の距離を精度良く検出するパルスレーダ装置を提供する。
【解決手段】電波を送信する送信部1と、送信部1を制御するパルス制御部2と、反射波を受信する受信部4と、受信信号の波形を蓄積する履歴蓄積部5と、受信信号との差分を求める差分演算部6と、受信信号の平均を求める積算演算部7と、差分信号の波形立ち上がりタイミングを検出する差分信号検出部8と、積算信号の波形立ち上がりタイミングを検出する積算信号検出部9と、移動成分の距離を求める差分信号距離演算部10と、静止成分の距離を求める積算信号距離演算部11と、差分信号測距値と積算信号測距値とを比較し、差分信号測距値から積算信号測距値を除去して測距値を求める静止測距値除去部12と、を設けてなるパルスレーダ装置。
(もっと読む)
立体物認識装置
【課題】周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度、走行環境等の不確定要因に対して、立体物の認識結果に基づく制御を適切なタイミングで実行可能とする。
【解決手段】ステレオカメラ2の撮像画像に基づく画像立体物の存在確率を画像立体物存在確率算出部11で算出し、ミリ波レーダ3の出力に基づくミリ波立体物の存在確率をミリ波立体物存在確率算出部12で算出し、レーザレーダ4の出力に基づくレーザ立体物の存在確率をレーザ立体物存在確率算出部13で算出する。そして、存在確率補正部14で、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率を、各認識センサの認識率に基づいて補正し、総合存在確率設定部15で、補正後の存在確率をフュージョンして総合存在確率を設定することで、障害物への接触回避や警報等の制御を確実且つ最適なタイミングで実行可能とする。
(もっと読む)
システム航跡測定装置および航跡割当・航跡誤差補正処理方法
【課題】複数のセンサから得られる複数のセンサ航跡を用いて、正確な、センサ航跡の航跡誤差推定、航跡割当およびシステム航跡を生成する。
【解決手段】ローカル航跡とリモート航跡のペアで航跡の組合せを作成し、各組合せの航跡ペアの差分を取って、組合せごとに算出したペアの差分の2乗和の最小値を1つ選択し、その最小値に対応する組合せを航跡割当とし、またペアの差分の2乗の頻度分布の最頻値の中から航跡バイアス誤差分散を算出する航跡割当処理部と、ローカル航跡とリモート航跡の航跡ランダム誤差分散と、航跡バイアス誤差分散に基づいて航跡バイアス誤差を算出する航跡誤差推定処理部と、航跡バイアス誤差分に基づいて補正した補正したリモート航跡とローカル航跡を重み付け統合してシステム航跡を生成する航跡統合処理部を備える。
(もっと読む)
位置推定システム
【課題】ユーザが移動しても確率モデルを変更することなくユーザ位置を推定する。
【解決手段】本発明は、タグリーダを有するユーザの位置の確率を、固定タグからの電波強度を使用して推定し(S1〜S4)、移動可能タグからの電波強度を使用して、推定された確率に対する重み付けを算出(S5、S6)することによりユーザの位置を推定するユーザ位置推定システムである。
(もっと読む)
多目標追尾装置
【課題】許容可能な処理時間で、正確な追尾結果を得ることができる多目標追尾装置を得る。
【解決手段】予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部1と、前記観測値選別部1により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けた。
(もっと読む)
物体検知装置
【課題】ノイズに対する耐性の高い物体検知装置を実現すること。及び、それを用いて、自車両の運動を推定する信頼性の高い車両運動推定手段を提供すること。
【解決手段】上昇変調区間では上昇区間レーダ画像を周波数の正の方向にシフトさせ、下降変調区間では逆に負の方向に下降区間レーダ画像を同じ量だけシフトさせて、最も大きな相関(よって最も小さな相関値SADまたはSSD)を与える周波数シフト量Δfを求める。これらの演算の結果、2つのレーダ画像を最もよく一致させるf軸方向の周波数シフト量Δfが得られ、このシフト量Δfに基づいて、自車両の車速Vを算出することができる。また、Δfが与える照合点から得られる、ドップラーシフトが排除されたレーダ画像上の移動物体を除去して静止物体レーダ画像を生成し、更にそれらを異時刻間で照合すれば、車速計を用いなくても自車両の運動を確実かつ正確に推定することができる。
(もっと読む)
地中レーダ装置及び画像信号処理方法
【課題】地中内に埋設された物体の検知精度を向上した信頼性の高いものでありながら、その物体を特定するための演算式を簡素化することができる地中レーダ装置地中レーダ装置及び画像信号処理方法を提供する。
【解決手段】地表面を基準とする水平面内方向とこの地表面から地中に向かう深さ方向とで3次元の行列データの各要素の数値を取得する3次元データ取得ステップと、地表面を基準とする水平面内の移動平均を求める移動平均算出ステップと、前記3次元データ取得ステップと前記移動平均算出ステップとに基づいて3次元画像を作成する画像化ステップと、隣り合った画像の相互相関からそのピーク鋭度を求めるピーク鋭度算出ステップと、そのピーク鋭度が最大の条件から地雷画像を特定する地雷画像特定ステップと、その地雷画像の最大値をとる点に基づいて地雷座標を特定する地雷座標特定ステップとを備えている。
(もっと読む)
障害物認識方法及び障害物認識装置
【課題】レーダとカメラの検出の時間ずれに起因したレーダ側検出倍率とカメラ側検出倍率と不一致に基づく障害物でないとの誤認識を極力回避するようにして自車前方の障害物の認識精度を向上する。
【解決手段】自車1の単眼カメラ3の撮影結果の画像処理により自車前方の撮影画像の水平、垂直の画像ヒストグラムの各倍率の基準の画像ヒストグラムとの残差和が最小値になる水平、垂直の倍率が略等しいときに、自車1のレーザレーダ2の探査結果に基づくレーダ側検出倍率と前記最小値のカメラ側検出倍率との所定範囲内の誤差を許容してレーダ側検出倍率とカメラ側検出倍率とが等しいと判断し、レーザレーダ2と単眼カメラ3とのセンサフュージョンの認識処理によりレーダ側検出倍率とカメラ側検出倍率とが等しくなる路面垂直物を障害物として認識する。
(もっと読む)
画像レーダ装置
【課題】目標の3次元形状を高精度に取得可能な画像レーダ装置を得る。
【解決手段】送信電波W1を照射する電波照射手段4と、目標Tからの受信電波W2に基づき目標T上の反射点の3次元分布を投影面に投影した画像を生成するレーダ画像再生部6と、反射点像を抽出する反射点抽出部8と、反射点像の対応付けを取る画像間反射点対応部9と、対応付けの取れた反射点の、各画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部15と、レーダ画像再生部6で再生される画像の投影面を特定するレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部12と、各画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、各反射点の画像におけるレンジ軸方向およびクロスレンジ軸方向の位置とに基づいて各反射点の3次元位置を推定する目標形状算出部14とを備えている。
(もっと読む)
レーダ画像処理装置
【課題】参照軌道と実軌道の地表面上の点に対する距離差を精度高く算出し受信信号を補償できるレーダ画像処理装置を得る。
【解決手段】レーダ波の波長を格納する観測パラメータ格納部1と、レーダ観測により得られた受信信号を格納する受信データ格納部2と、レーダ観測時におけるプラットフォームの軌道情報を格納する軌道情報格納部3と、前記プラットフォームの軌道情報から直線状の参照軌道として設定し、受信信号を複数の区画に分割し、区画の中心に相当する地表面上の点を求めて補償の基準点として設定し、合成開口中の各パルス送受信位置で、実軌道上のアンテナ位置と前記基準点の第1の距離、及び前記参照軌道上のアンテナ位置と前記基準点との第2の距離を、前記プラットフォームの移動を考慮しながら求め、第1及び第2の距離の差分である距離変化を算出し、前記波長と距離変化に基づき前記受信信号を補償する動揺補償部20とを設けた。
(もっと読む)
ミリ波レーダによる道路交通監視装置
【課題】ミリ波レーダにより走行車両を計測し車線数、各車線幅、中央分離帯幅などを自動的に判断しながら車両交通量を監視する道路交通監視装置を提供する。
【解決手段】ミリ波レーダ2によりミリ波ビーム7を照射し反射波受信により複数の走行車両の検出を行う。照射角、反射までの時間、ドップラーシフトの関係から、ミリ波レーダ2からの距離、方向角度、速度等を算出し、車両の走行軌跡を求め、走行車両数と車線幅方向の関係をグラフ化してグループ分けを行い、グラフの山から車線数を抽出し、グラフの山と両脇の谷から車線幅を抽出する。走行軌跡の速度成分方向が正から負に切り替わる境界部分の中央分離帯の幅を求める。以上で得られた道路配置に基づき車両交通量の計測と監視を行う。
(もっと読む)
381 - 400 / 535
[ Back to top ]