
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
441 - 460 / 535
測角装置
【課題】ウェーブレット変換を用いるレーダ装置であっても、ビーム幅内における目標が存在する方向を測角できる測角装置を提供する。
【解決手段】入力信号に対してウェーブレット変換を施すことにより得られたウェーブレット展開係数に基づき目標を検出する目標検出部20と、目標検出部20において目標が検出されたビームポジションにモノパルスビームを送受信してモノパルス測角を行う測角部30とを備えている。
(もっと読む)
分散ネットワーク・レーダ装置

【課題】 複数のレーダを使用して探知能力の拡大を図るレーダ装置において、車載移動型捜索レーダのように、設置場所が探索の都度に移動するために各レーダの周囲の地形環境が変化する場合であっても、電波干渉の影響を受けることなく、探知能力の拡大を図ることができる分散ネットワーク・レーダ装置を提供する。
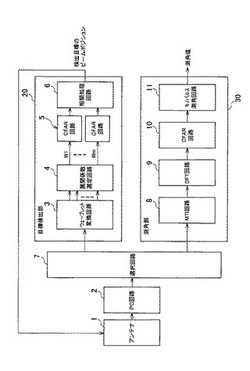
【解決手段】 レーダ1とレーダ2を相互にネットワーク連接し、前記各レーダ間の送受信同期のために送受信同期部7−1で制御し、前記各レーダ毎に設置された送信部1−1及び2−1から互い相異なる周波数チャンネルの電波を目標3に向かってアンテナ1−3及び2−3を介して放射し、前記目標3で反射された全ての周波数チャンネルの電波を前記各アンテナ1−3及び2−3を介してそれぞれで受信し、各受信信号の電力振幅検出、ビデオ積分、測角演算、平均演算を行うようにした。
(もっと読む)
レーダ装置
【課題】 クラッタマップ部を小型化し、クラッタによる誤警報を抑圧するレーダ装置を提供する。
【解決手段】 仰角情報及び送受信方向情報に基づき、低仰角走査時には、受信機の出力信号とメモリ203に蓄えられた信号との間で平均化処理を実施して結果をメモリ203に蓄え、中高仰角走査時には、低仰角走査時に処理されてメモリ203に蓄えられた方向j−1,j,j+1の信号に対して、ウエイト発生器204で発生した重み付け係数を乗算器201C〜201Eで乗算し、その結果得られた信号の総和を総和器205で計算する。
(もっと読む)
構造物中の電磁波の伝播速度推定方法、構造物内の物体探査方法、構造物中の電磁波伝播速度推定装置、構造物内の物体探査装置、コンピュータ・プログラム及び記録媒体
【課題】 コンクリート構造物等の構造物中の電磁波伝播速度推定方法、構造物内の物体探査方法を提供する。それに伴うコンピュータ・プログラム、記録媒体、構造物中の電磁波伝播速度推定装置、構造物内の物体探査装置を提供する。
【解決手段】 物体2が内在する構造物1の一主面上に送信器3と受信器4を配置し、送受信器3,4を一方向へ移動しながら送信器3から構造物1内にパルス状の電磁波を照射し物体2で反射した電磁波パルスを受信器4で受信する.電磁波パルスの観測波形から、各測定位置で電磁波パルスを受信するまでの伝播時間の観測値を求め、伝播時間の推定値を設定し、伝播時間の推定値は物体2の位置xT、yT(xTは一方向の位置、yTは深さ位置)と構造物1内の電磁波の伝播速度vの関数として表され、各測定位置の伝播時間の推定値と観測値との差分が最小となる推定値から、電磁波の伝播速度vと物体の位置xT、yT を同時に推定する。
(もっと読む)
レーダシステム
【課題】 クロスレンジ分解能を向上し、マルチパス環境下においても測角精度を確保することができ、妨害環境下においても探知/追尾性能を確保することができるレーダシステムを提供する。
【解決手段】 目標4の捜索範囲又は追尾範囲、所望のクロスレンジ分解能、レーダ装置1,2の距離分解能に応じて決定された離隔距離Lだけ互いに離隔してレーダ装置1,2を配置し、レーダ装置1から目標4までの距離Rt1が基準距離を超える場合には、レーダ装置1で測角して生成された方位情報に基づいて目標4の位置を特定し、基準距離以下の場合には、レーダ装置1,2で測定して生成された距離情報に基づいて目標4の位置を特定する。
(もっと読む)
レーダー装置
【課題】 振幅比較モノパルス方式のレーダー装置において、和信号Σ及び差信号Δを算出することなく、計測対象物の方位を速やかに検出する。
【解決手段】 互いに指向性の異なる受信アンテナ100A,100Bと、受信アンテナ100A,100Bの受信電力比Pを算出する手段と、受信電力比Pに基づいて計測対象物の方位nを取得する変換部170とを備える。本発明では、和信号Σ及び差信号Δを算出するのではなく、受信電力比Pを算出し、これに基づいて計測対象物の方位nを取得している。ここで、受信電力比Pは、簡単な四則演算のみによって演算することができることから、非常に高いリアルタイム性を得ることが可能となる。
(もっと読む)
航跡相関統合装置
【課題】目標情報のより状況認識を行い易い表示を提供できる航跡相関統合装置を得る。
【解決手段】最初の航跡相関統合は、レーダ航跡生成部1で生成された航跡と角度センサ航跡生成部2で生成された航跡の全ての組合せの相関の尤度を計算して航跡同士の組合せの相関の有無を判定し、2回目以降の航跡相関統合は、レーダ航跡生成部1及び角度センサ航跡生成部2で生成された航跡と既存のグループの相関の尤度を計算して前記航跡と前記グループとの相関の有無を判定する航跡相関部3と、航跡相関部3により相関有りと判定された航跡同士、又は航跡と既存のグループは必ず同一のグループに入るようにグループ化し、グループの中心位置と広がりを計算するグループ処理部4と、1対1対応がとれた航跡群は統合航跡を表示し、1対1対応がとれない航跡群は前記グループの中心位置と広がりに基づきグループを楕円で表示する統合航跡・グループ表示部6とを設けた。
(もっと読む)
受信無線信号において立ち上がりエッジ期間を識別する方法及び受信機
受信無線信号の立ち上がりエッジ期間を識別する方法は、連続する期間における最大エネルギー期間を識別することであって、受信無線信号は最大エネルギー期間において最大平均エネルギーを有する、最大エネルギー期間を識別することを含む。本方法は、連続する期間における最小エネルギー期間を識別することも含む。受信無線信号は最小エネルギー期間において最小平均エネルギーを有する。さらに本方法は、最大平均エネルギー及び最小平均エネルギーに基づいて閾値エネルギーを設定すること、受信無線信号によって使用される無線チャネルの特性に基づいて窓期間の個数を確定すること、及び、最大エネルギー期間に前記個数の窓期間内で先行する最早期間を立ち上がりエッジ期間として識別することを含む。立ち上がりエッジ期間における受信無線信号は、平均エネルギーが閾値エネルギー以上である。  (もっと読む)
(もっと読む)
確率質量拡散によるモデルセットの適応
少なくとも1つのパラメータの一連の測定z,R;M;(t1,t2)を実行し且つ予測を再帰的に実行する方法。その方法は、少なくとも第1の測定インスタンス(M(tk);(k))に基づいて、少なくとも2つのモデル(C,S)に対する結果(x,P)を予測する工程と、次の測定インスタンス(M(tk+Tp)(k+Tp))の後、対応する時点に対するモデル(C,S)を更新し、これにより第1の測定インスタンスに基づいて行なわれる予測が次の測定インスタンスを考慮して更新される工程と、次の測定インスタンス(tk+Tp)(k+Tp)に対する少なくとも1つのモデル(C,S)を再配置し、これにより一方の更新モデルが他方の更新モデルに影響を及ぼす工程とを有する。少なくとも1つの補完(C)モデル及び少なくとも1つのサブ(S)モデルを含むモデルセットの場合、再配置の工程において、SモデルがCモデルに影響を及ぼすことはない。排他的な補完(L,N,R)モデルを含むモデルセットの場合、再配置の工程において、モデルセット(L,N,R)内のモデルの所定の対に対して、より高い確率(μ)を有するモデルはより低い確率を有するモデルに影響を及ぼすが、より低い確率(μ)を有するモデルがより高い確率を有するモデルに影響を及ぼすことはない。 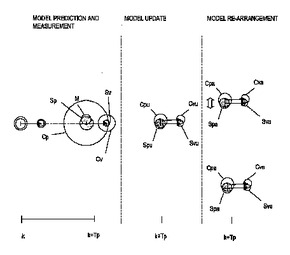 (もっと読む)
(もっと読む)
共分散行列算出方法、ウェイト算出回路、アダプティブアレイアンテナ、及びレーダ装置
【課題】 本発明は、適応ウェイト算出の処理量を短縮することが可能な共分散行列算出方法を提供する。
【解決手段】 本発明の共分散行列算出方法は、アンテナ(#1〜#M)を介して受信される目標反射信号を、データ蓄積部3に受信タイミングに対応させて記憶する。
データ蓄積部3は、所定長さ(N個)の処理レンジセルに対応するメモリを有し、その処理レンジセルを時間軸上で複数(Q)個に分割し、この分割された各区分内で、その区分内のレンジセルにおける共分散行列を算出する。
従って、N個の全処理レンジセルにおける共分散行列算出の複素演算は、スライディングウィンドウ方式による各レンジセルにおいて行った従来の共分散行列の算出回数(N回)と対比して、算出回数は(N/Q)回となるので、演算量を大幅に削減できる。
(もっと読む)
軸ずれ角推定装置および軸ずれ角推定方法
【課題】自速度の検出を不要とし、従来装置よりも演算量を削減してテーラー展開を用いずに軸ずれ角を推定することができる軸ずれ角推定装置および軸ずれ角推定方法を得る
【解決手段】複数のレーダ反射体のそれぞれについて相対速度と方位角度とを含む観測データを検知する検知手段110と、複数のレーダ反射体のそれぞれについて検知した観測データに基づいてベクトル演算による最小二乗法によりレーダのオフセット角推定値を算出する演算手段120とを備える。
(もっと読む)
レーダ装置
【課題】応答性の劣化を抑制しつつ精度良く物標位置の算出を行うことのできる「レーダ装置」を提供する。
【解決手段】物標位置補正部24は、物標位置予測部23によって今回の予測相対位置Pftが予測されているときに、レーダ測位部10によって今回の計測相対位置として図中のPOtが算出されると、今回の相対位置Ptとして、計測相対位置POtと予測相対位置Pftとを結ぶ線分上の位置を算出する。ここで、物標位置補正部24は、計測相対位置POtまでの距離Qが小さいほど、また、物標の今までの追尾回数Rが少ないほど、また、計測相対位置POtの方向角と予測相対位置Pftの方向角の差dθの絶対値の今までの平均値φが大きいほど、計測相対位置POtよりの位置となるように相対位置Ptを算出する。
(もっと読む)
車両と対象物体との距離を求める装置および少なくとも2つの送受信手段の間隔を求める方法
【課題】信号を送信し対象物体から反射したエコーを受信する送受信手段と、反射エコーの受信信号に基づき距離d1,d2,k,x,yを求める電子ユニットを用いて、車両と対象物体との距離を求める際、各送受信手段の間隔を少なくとも同じ精度を維持しながらいっそう簡単に捕捉できるようにする。
【解決手段】電子ユニットは、送受信手段の種々の感度で、および前記対象物体に対し一定の距離で、反射エコーの受信信号を捕捉し、種々の感度で受け取った受信信号に対し平均値を形成する。
(もっと読む)
レーダ装置とその信号処理方法
【課題】観測対象の速度分布のばらつきが大きい場合や速度の折返しが発生した場合でも、信頼性の高いドップラ速度を算出する。
【解決手段】電力強度分布を示す速度スペクトルのドップラ速度値それぞれの電力強度を極座標系の電力ベクトルに変換する(ステップS3a)。次に、上記変換された極座標系の電力ベクトルを合成し、電力合成ベクトルを求める(ステップS3b)。そして、上記求められた電力合成ベクトルの偏角を求める(ステップS3c)。この電力合成ベクトルの偏角をもとにドップラ速度を算出する(ステップS3d)。
(もっと読む)
物体検知装置および方法
【課題】検知領域の上下の傾きが生じる場合でも、簡単に、かつ確実に物体を検知することができるようにする。
【解決手段】車両11のレーザレーダは、垂直領域81乃至85にレーザ光が照射するようにレーザ光をスキャンする。レーザ光は、車両12によって反射され、車両11のレーザレーダによって受光される。レーザレーダは、垂直領域81乃至85のそれぞれの領域毎の受光量の中から、受光量が最大となる垂直領域(例えば、垂直領域84)を検出する。レーザレーダは、検出された垂直領域84の位置が垂直領域81乃至85の中心の領域83に位置するように、光軸ズレを補正する。本発明は、車両用レーザレーダに適用することができる。
(もっと読む)
信号検出方法及び信号検出装置
【課題】 従来は、しきい値を下げるほど正弦波信号の検出はし易くなるが、同時に、雑音を正弦波信号として誤検出する可能性が高くなるという課題がある。
【解決手段】 正弦波信号と雑音の和の受信信号の包絡線確率密度は、正弦波信号が存在しない場合にはレイリー曲線分布となり、正弦波信号が存在する場合は正弦波信号のSN比が大きくなるにつれて正規分布に近付くということに着目し、レイリー曲線分布を特徴化して、データベース4に予め比較用特徴データを格納しておく。特徴抽出回路2は、受信信号の包絡線信号の平均値Sμ1を算出し、それを包絡線確率密度の分布特徴を示す特徴データとして出力する。比較判定回路3は、特徴抽出回路2からの特徴データと、データベース4から出力された比較用特徴データとを比較して、受信信号中の正弦波信号の有無を判定する。従って、従来のしきい値を下まわるレベルの正弦波信号の検出ができる。
(もっと読む)
電波誘導シーカ装置
【課題】 本発明は、目標との距離に応じて送信パルス幅を可変することで、近距離でのブラインド距離を短縮することができる電波誘導シーカ装置を提供することにある。
【解決手段】 目標からの反射信号を受信器21で受信して直交検波した後の受信信号に対して移動平均フィルタ53で移動平均処理を施し、この受信信号に対して利得調整器57で利得調整処理を施しておき、基本となるクロック信号を分周期器41で複数の段階に分周して得た何れか1つのリサンプルクロック信号に従って、この利得調整処理後の受信信号をリサンプル器63でリサンプルし、このリサンプル後の受信信号を予測距離演算器29で目標までの距離に関連付けた3種類のゲート信号の期間で通過させ、パルス幅制御器31でこの通過後の異なる信号間の誤差に基づいてパルス幅制御信号を生成し、送信器33でこのパルス幅制御信号に応じてパルス信号の幅を変更して送信する。
(もっと読む)
対象を認識して分類する方法および装置
対象を認識して分類する方法と装置であって、その場合にセンサによって電磁的放射が送信されて、対象で反射された部分放射がセンサによって受信され、受信された信号が、格納されている特徴的な値との比較によって評価されて、評価に基づいて反射する対象の分類が推定される。そのために、受信信号を評価するための評価手段が設けられており、特徴的なパターンを格納するためのメモリが設けられており、そのメモリに格納されたパターンが評価された信号と比較されて、比較に基づいて反射する対象の分類を推定することができる。 (もっと読む)
レーダ装置
【課題】 消え残りクラッタ又はクラッタが存在しても、妨害抑圧性能が劣化しないレーダ装置を提供する。
【解決手段】 主アンテナ3で送信波を送信する前の受信期間をレーダ制御部9で設定する。妨害抑圧部11は、設定した送信前の受信期間に主アンテナ用及び補助アンテナ用の受信機5A及び5Bで受信した受信信号を用いて妨害波抑圧処理のためのウエイトを算出し、これを送信直後の受信期間のウエイトとして用いるようにウエイトを制御する。
(もっと読む)
レーダ装置
【課題】 消え残りクラッタ又はクラッタが存在しても、妨害抑圧性能が劣化しないレーダ装置を提供する。
【解決手段】 主アンテナ3から放射した送信波の目標からの反射波に含まれるクラッタを主アンテナ用及び補助アンテナ用のクラッタ抑圧部10A及び10Bで抑圧し、主アンテナ用及び補助アンテナ用のクラッタ抑圧部10A及び10Bの出力信号を主アンテナ用及び補助アンテナ用の記録部11A及び11Bに受信期間分記録し、記録した信号を遠い距離から順に妨害抑圧部12に出力して、妨害抑圧部12で妨害波抑圧処理のためのウエイトを制御し、妨害波を抑圧する。
(もっと読む)
441 - 460 / 535
[ Back to top ]