
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
501 - 520 / 535
障害物検知装置
障害物検知装置は、所定の広がり角を有するビームを複数の異なる方位に向けて順次的に放射し、各方位における障害物からの反射波を受信することにより、各方位についてビームの放射角度範囲内に存在する障害物を検知する障害物検知部(11)と、障害物検知部から出力される各方位についての反射波の受信信号に基づいて、それぞれの方位における障害物と自車両との間を代表する距離を算出する距離算出部(12)と、距離算出部で算出された各方位についての距離を画像作成基準として扱うことにより、各方位に放射されたビームの放射角度範囲内において2次元的に展開された図形を障害物画像として作成し、当該障害物画像を表示するための画像データを生成して出力する障害物画像作成部(14)と、障害物画像作成部によって作成された画像データを受け取り、障害物と自車両との位置関係を示す画像を表示する表示部(15)とを備える。  (もっと読む)
(もっと読む)
侵入物検知装置および電波反射器
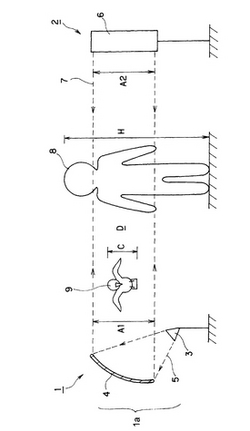
【課題】検知対象物と非検知対象物との識別精度を高め、誤検知を低減し得る信頼性の高い侵入物検知装置を提供する。
【解決手段】レーダ1の送受信アンテナ1aをパラボラアンテナにより構成し、電波反射器2を複数のリフレクタからなるリフレクタアレイ6により構成し、レーダ1近傍の送信波5および電波反射器2近傍の反射波7のビーム幅A1,A2を、検知対象から除外すべき鳥9などの非検知対象物が遮蔽し得るビーム幅Cよりも大きく設定する。
(もっと読む)
目標追尾装置

【課題】 運動モデルの信頼度の発振や、観測雑音低減性能の劣化を招かない閾値を算出して、追尾精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】 信頼度算出器12により算出される等速直線運動の運動モデルの信頼度が所定値より高い領域内に、その運動モデルを用いて算出された予測位置を中心とする誤差楕円体が収まる閾値Aを算出する。これにより、運動モデルの信頼度の発振や、観測雑音低減性能の劣化を招かない閾値が得られ、追尾精度を高めることができる。
(もっと読む)
パルス信号分類装置
【課題】 到来パルス信号のパルス到来時刻が互いに近接しているような場合でも、各受信パルスのパルスデータを正確かつ高速に電波源毎に分類する。
【解決手段】 複数の電波源からのパルス信号を受信する受信部と、受信パルス信号のパルスデータを生成するパルスデータ生成部と、そのパルスデータから受信パルス間のパルス到来時刻間隔を算出し、前記パルスデータを電波源毎に分類するパルス間隔分類処理部と、その電波源毎に分類された各パルスデータ群を記憶するパルスデータ記憶部と、各パルスデータ群からパルス到来時刻が互いに近接する近接パルスの波形データを抽出する近接パルス波形抽出部と、その波形データと前記各パルスデータ群の平均波形データとの相関処理を行う相関処理部とを備え、近接パルスの波形データとの相関値が大きいパルスデータ群のパルスデータを近接パルスのパルスデータと変更するようにした。
(もっと読む)
車両用物体認識装置
【課題】レーザレーダセンサ5の高さ方向における中心レーザ光の中心軸角度と基準角度ΔAとのずれ角度を求める対象車種の制限を緩和し、もって、レーザレーダセンサ5の向きの変化を検出する機会を増加すること。
【解決手段】
Y軸方向における個々のレーザ光のビーム幅が、リフレクタ位置の設置高さのばらつき範囲をカバーできるまで広がる距離Zよりも遠方に前方車両が位置する場合に、その前方車両のリフレクタからの反射レーザ光を生じさせたレーザ光の面番号を検出する。これにより、前方車両のリフレクタ設置高さの変化に起因して、そのリフレクタからの反射レーザ光を生じさせるレーザ光の面番号が変化することを抑制できる。従って、複数個のレーザ光の面番号の平均値に基づいて、高さ方向におけるレーザ光の中心軸角度と基準角度ΔAとのずれ角を示す上下光軸ずれ学習角度θuを精度よく算出することができる。
(もっと読む)
車両用制御対象判定装置
【課題】 隣車線から自車線に侵入して制御対象となる他車両を的確に判定できるようにする。
【解決手段】 レーダー装置14により検知された物体が自車の走行軌跡に接近する横方向相対速度を横方向相対速度検出手段M2で検出するとともに、前記物体が自車に接近する進行方向相対速度を進行方向相対速度検出手段M3で検出し、物体を制御対象と判定するための確定度を算出する確定度算出条件を、確定度算出手段M4が横方向相対速度および進行方向相対速度に基づいて変更するので、隣車線の他車両が自車線に割り込もうとして横方向相対速度および進行方向相対速度が変化したときに確定度を変化させることで、制御対象判定手段M5が前記他車両を制御対象の候補として認識し易くし、自車線に割り込もうとする他車両を制御対象として判定する精度を高めることができる。
(もっと読む)
実体の表現方法、実体の分類方法及び分類装置、実体表現のストア(store)を確立する方法、実体の表現を生成する装置、コンピュータプログラム、並びに信号処理装置
【課題】複雑な形状の移動物標による後方散乱信号を受信し、物標の存在や分類を行う場合、アスペクト角のわずかな変化によって後方散乱信号に大きな変動を生じ、統計的推定値の誤差が非常に大きくなる。この誤差を少なくし、信頼性の高い形状記述子を得る。
【解決手段】実体に質問信号を当て、実体からの反射を繰り返しサンプリングして、反射信号の強度にそれぞれ依存する第1の組の値を得る。このサンプル値に対数変換を適用して、第2の組の値を得る。特定の算式により、第2の組の値の平均値と中央値の差を表す第1の記述子の値(L)と、第2の組の値の各々と第2の組の値の代表値との間の偏差の絶対値の平均値を表す第2の記述子の値(D)とを少なくとも含む一組の記述子を導出し、これを異なるアスペクト角において取得する。これらのデータを記憶された複数のデータ集合と比較して物標を分類する。
(もっと読む)
パルスレーダ装置
【課題】 本発明は、背景技術で説明したように、一般的なパルスレーダでは、定期的にパルスを送信するため、周波数スペクトラムを観測されると線状の成分が発生し、他システムへの干渉が問題となる。
本発明では、周波数スペクトラム上で観測される線状の成分を低減し、平滑化することができることを目的とする。
【解決手段】 本発明では、対象物までの距離を測定するパルスレーダ装置において、パルスの送信間隔を、パルス送信から対象物に反射して戻ってくるパルスを受信する最大時間以上で、且つシステムが許容できる時間内で送信毎にランダムに変化させて、パルスを送信する送信手段と、送信したパルスが対象物に反射して戻ってきたパルスを受信する受信手段とを有するパルスレーダ装置を用いる。
(もっと読む)
位置検出システム
【課題】IDを読み取る際にIDタグリーダの直線偏波アンテナの偏波面を各々のIDタグの直線偏波アンテナの偏波面に合わせることで、IDタグリーダの位置をさらに高精度に検出することができる位置検出システムを提供することを課題とする。
【解決手段】本発明にかかる位置検出システム1は、直線偏波アンテナ10aを有するIDタグ10から発信されたIDを直線偏波アンテナ20aを有するIDタグリーダ20で読み取り、読み取られたIDに基づいて当該IDタグリーダ20の位置を位置検出装置30で検出する。
(もっと読む)
地中レーダ画像処理法
【課題】
地中レーダ等の近距離レーダの画像を処理する方法において、現在使われている処理法は、多大な計算時間を要する、また、特に複数の対象物が近接して存在する場合に虚像を生じるという欠点がある。本発明はこれら2つの課題を解決することを目的とする。
【解決手段】
対象物モデルから参照パターンを求め、参照パターンの自己相関、参照パターンと受信データとの相互相関を求める。相互相関から対象物探査用データと対象物評価用データを作成し、対象物探査用データの極値を自己相関と対象物評価用データに基づいて評価する。評価の結果、その極値値が対象物の可能性があると判定されると、対象物探査用データのその極値の位置から自己相関を減算し、新たな探査を実行する。
(もっと読む)
FM−CWレーダ装置
【課題】 隣接して複数の目標物がある場合、それぞれの目標物からの受信信号がお互い干渉して目標検出のための閾値が上がり、目標物を検出できなくなるおそれがあった。
【解決手段】 目標検出のための閾値は、目標がない状況で受信したビート信号のノイズ成分の平均値や、送受信機と地面の角度や、送受信機の利得や送受信機の温度や、降雨状態をパラメータにして決定し、目標物の振幅値で閾値が左右されないようにすることで、目標物の不検出を抑えた。
(もっと読む)
移動体の周囲物体検出装置及び移動体の周囲物体検出方法
【課題】検出精度を向上させることのできる移動体の周囲物体検出装置及び方法を提供する。
【解決手段】複数の検出手段X(i),X(i+1)・・を有し、各検出手段は、自車両の周囲に存在する物体を検出するセンサ部13と、センサ部13で検出された物体と自車両との間の相対位置データを求める位置算出手段14と、センサ部13の検出データに基づいて、自車両と物体との間の相対位置データの確信度データを求める確信度演算手段15とを有する。そして、各検出手段で求められた確信度データに基づいて、この検出手段で求められた相対位置データを重み付け処理し、重み付け処理された各相対位置データに基づいて、自車両と物体との相対位置を求める統合座標算出手段11を備えたことを特徴とする。
(もっと読む)
ディジタル濾波方法
非線形フィルタによりK個の入力値をディジタル濾波する方法が紹介され、フィルタが、K個の入力値からR最大値を発生する(K≧R≧1)。特にこの方法は。奇数K個の入力値から、出力値として中央値を発生するために使用することができ、従ってR=(K+1)/2である。基本思想は、一方では固定小数点形式で入力値の2進表示の使用であり、他方ではビットで逐次の処理であり、すべての普通の2進数表示が固定小数点形式で使用され、使用すべき数表示のそれぞれの性質を考慮して僅かな整合しか必要とされない。
この方法は、ディジタルフィルタの実現のため、特に物体識別システムにおける信号処理のために使用することができる。 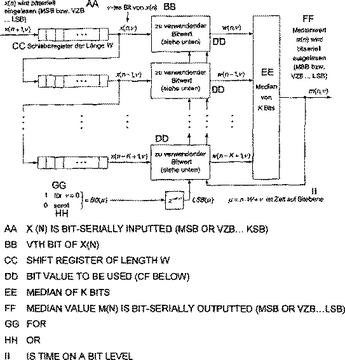 (もっと読む)
(もっと読む)
周波数変調レーダの信号処理装置
【課題】ディジタル信号重畳に起因したビート信号上の不要信号誤検知を良好且つ適応的に抑制した周波数変調レーダの信号処理装置を得る。
【解決手段】ビート信号Bの周波数解析部1と、周波数解析部1の解析結果から目標物体を検出する目標検出部2と、周波数解析部1の解析結果からランダム雑音のレベルNiを検出するランダム雑音レベル検出部6と、周波数解析部1の解析結果からランダム雑音以外の不要信号のレベルUiを検出する不要信号レベル検出部3と、ランダム雑音・不要信号の各レベルNi、Uiに基づいて、不要信号除去用のスレッショルド値ThUを設定するスレッショルド値設定部5とを備えている。
スレッショルド値設定部5は、不要信号の発生が既知のビート周波数に対しては、不要信号・ランダム雑音の各成分の大きさからスレッショルド値ThUを設定し、目標検出部2は、スレッショルド値ThUを用いて目標物体を検出する。
(もっと読む)
偏波発信源の定位が改善されたスマートアンテナシステム
アンテナアレイ及び信号前処理装置及び方法。アンテナアレイは二個の直交電気双極子(30)及び二個の直交磁気双極子(40)を有する直交偏波アレイである。前処理装置は信号発信源定位のための空間スペクトル情報を得るために、アンテナからの信号を前処理するためのものである。前処理装置は、各素子毎に信号自己相関行列を形成するために前記入力の後に接続された自己相関器と、前記自己相関行列を平均化し、それによって発信源定位を推定するために固有構造に基づく推定器に使用するために適した標本共分散行列を形成する平滑化器とを備える。 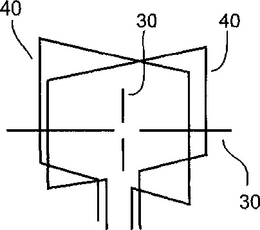 (もっと読む)
(もっと読む)
レーダ装置
【課題】 1つの追随航跡に含まれる目標の機数を正確に判定することができるレーダ装置を得る。
【解決手段】 対象となる目標11に追随しながら指向性をもつ追随ビームを送信し、目標からの反射波を受信して目標の検出、追随、情報管理、類識別及び表示を行うレーダ装置2において、目標を検出するためのレンジビン401内における第1の目標の機数を検出するとともに、追随フィルタの相関ゲート402内でかつレンジビン401外における第2の目標の機数を検出する。前記の第1の目標の機数及び第2の目標の機数を加算して総合機数を判定する。
(もっと読む)
レーダーセンサ
本発明によれば、送受信装置(10、12)と、受信信号(A)をデジタルデータに変換するアナログ/デジタル変換器(14)と、記録期間のデジタルデータを時間の関数として表す有効データ群(D1)として記憶する記憶装置(18)と、有効データ群のスペクトル(S)を計算する変換装置(16)と、スペクトルを評価する評価装置(24)と、を備える、レーダーセンサであって、スペクトル(S)をデジタルの比較データ群(D2)に逆変換する逆変換装置(22)と、有効データ群(D1)と比較データ群(D2)との間の適合を評価し、適合している場合にはスペクトル(S)を評価装置(24)に伝達し、適合していない場合にはエラー処理を行うように構成される、比較装置(20)と、を備えるレーダーセンサが提供される。 (もっと読む)
レーダ装置
【課題】 MUSIC法やEsprit法などによって到来波数の推定を行うレーダ装置において、精度良く到来波数の推定が行えるようにする。
【解決手段】 到来波数推定処理の際に、信号処理部8に記憶しておいたビート周波数ごとのスレッショルドλTH1〜λTH256に基づいて雑音を考慮したスレッショルドλTHを設定し、このスレッショルドλTHに基づいて到来波の固有値λが信号空間の固有値λ1〜λLか雑音空間の固有値λL+1〜λKかを分別する。これにより、雑音を考慮に入れた上で、信号空間の固有値の数から到来波の数を正確に推定することができる。
(もっと読む)
レーダ装置
【課題】 位相モノパルス方式でターゲットの方位を決定するFM−CWレーダ装置において、マルチターゲットによる異常値を検出する。
【解決手段】 3本の受信アンテナを5λ/4および6λ/4の間隔で配置し、間隔5λ/4の受信アンテナの組み合わせから得られる方位と間隔6λ/4の受信アンテナの組み合わせから得られる方位との差が所定値未満であるかを判定し(ステップ1000)、それがn回連続するとき正常と判定する(ステップ1004)。n回連続していない時または方位の差が所定値以上であるときマルチターゲットによる異常値と判定する(ステップ1006)。
(もっと読む)
車両周囲物体検出装置
【課題】グルーピングされた検出点のいずれかの相対位置に誤差が含まれている場合であっても、物体の相対位置を求めるときにその誤差の影響を取り除くことができる車両周囲の物体を検出する装置を提供する。
【解決手段】自車両前方の物体について、各検出点において位置座標を検出し(ステップS1)、所定の条件を満たす検出点同士をまとめて物体ごとに検出点のグループを作成し、グルーピングを行う(ステップS6、S10)。このグルーピングされた検出点のそれぞれについて、信頼性判断値R1(t)またはR2(t)を算出し(ステップS7、S11)、その値に基づいて、同一グループにグルーピングされた検出点から代表検出点を選択する(ステップS8、S12)。選択された代表検出点の相対位置に基づいて、物体の相対位置を決定する(ステップS9、S13)。
(もっと読む)
501 - 520 / 535
[ Back to top ]