
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
361 - 380 / 535
パッシブコヒーレント探索アプリケーションのための、狭帯域事前検出信号を処理するシステムおよび方法
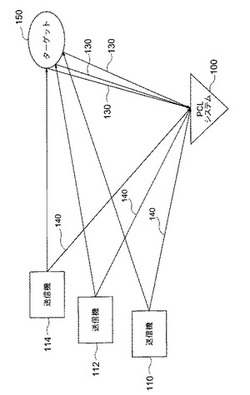
【課題】パッシブコヒーレント探索アプリケーション(PCL)において、狭帯域事前検出信号を処理するシステムおよび方法を提供する。
【解決手段】受信サブシステムは、基準信号およびターゲット信号を統制されていない送信機から受け取る。PCLシステムは、ゼロ−ドップラー消去、直交復調、基準ビーム再生、コヒーレント処理区間選択、パワースペクトル密度推定、クロスアンビギュイティ関数形成などを含み、基準信号はターゲット信号に関してフィルタリングされて、第1出力基準信号が形成される。第1出力基準信号は第1ターゲット信号と結合されて、第1出力ターゲット信号が形成される。次に、出力ターゲット信号は、後続のPCL探索処理オペレーションに用いられる。フィルタは、ターゲット信号と後続のターゲット信号の差に関して更新される。さらに、基準信号およびターゲット信号の相関処理のために2つの経路が用いられる。
(もっと読む)
電子走査型ミリ波レーダ装置およびコンピュータプログラム

【課題】到来波に不要な成分を含む場合においても、この不要成分を効果的に除去する電子走査型ミリ波レーダ装置を提供する。
【解決手段】デジタル化されたビート信号をフーリエ変換し、これに基づいて所定のピッチ角度でビーム信号を生成する。次に、生成されたビーム信号から対象物の方位、距離を検出する。一方、フーリエ変換された各ビート信号から不要な信号成分を除去し、この信号を逆フーリエ変換する。そして、逆フーリエ変換された各ビート信号から対象物の方位および距離に基づいて、ビート信号に対し分離処理を行う。
(もっと読む)
遅延時間推定装置
【課題】遅延時間の推定精度の劣化を招くことなく、相関行列の次元数Mdを小さくして、演算量の低減を図ることができるようにする。
【解決手段】ディジタルの受信信号s(1),s(2),・・・,s(Nd)を予め設定された複数の遅延時間推定区間#l(1≦l≦L)の部分信号に分割し、複数の遅延時間推定区間#lの部分信号にデシメーション処理を施すデシメーション処理部7を設け、遅延時間推定部8−1〜8−Lが複数のデシメーション処理信号xl(1),xl(2),・・・,xl(M)に超分解能遅延時間推定処理を施して、遅延時間推定区間#lに存在している目標信号の遅延時間を推定する。
(もっと読む)
物体探知装置
【課題】反射波成分の強度に基づいて対象物の状態を検出できる物体探知装置を提供する。
【解決手段】A/D変換部10は、各アンテナ位置で受信された受信信号の強度をサンプリングタイミングごとに強度データとし、強度データのアンテナ位置ごとの集合を位置毎データ列として記憶部5に記憶する。不要波算出手段12は、同一のサンプリングタイミングごとに、複数のアンテナ位置の強度データが分布している強度範囲を一定の強度幅の強度区間に分割し、強度データのデータ数が最多の強度区間について強度データの平均値を求め、当該平均値の集合を各アンテナ位置で共通の不要波成分として出力する。不要波除去手段13は、各位置毎データ列から不要波成分をそれぞれ減算することにより反射波成分を求め、検出手段14は、複数のアンテナ位置の反射波成分の強度および電磁波が送信されてから反射波成分が受信されるまでの経過時間に基づいて対象物の状態を検出する。
(もっと読む)
レーダ装置
【課題】電力の微弱な目標の探知性能を向上できるレーダ装置を得る。
【解決手段】目標からの反射パルスを受信してA/D変換する受信手段1と、パルスヒット毎の受信、送信信号の相関をとるパルス圧縮手段2と、目標からの直接波とリピータを介した目標からの間接波とが存在するレンジビンを推定し、間接波が存在するレンジビンから直接波が存在するレンジビンへの積分路を決定する積分路探索手段3と、前記積分路に従って、レンジ方向にノンコヒーレント積分を実施するレンジ方向ノンコヒーレント積分手段4と、パルスヒット毎に得たレンジ方向ノンコヒーレント積分手段4の出力をヒット方向にノンコヒーレント積分を実施するヒット方向ノンコヒーレント積分手段5と、ヒット方向ノンコヒーレント積分手段5の積分結果を閾値処理し、閾値を越えたレンジビンに対して目標の検出とみなす閾値手段6とを設けた。
(もっと読む)
車両の障害物検知装置及びその検知方法
【課題】アップビート周波数とダウンビート周波数のペアリングを、短時間で正確に行うことができる車両の障害物検知装置及び方法の提供。
【解決手段】周波数変調持続波(FM−CW)を送信し、アップビート周波数とダウンビート周波数とを出力するレーダー装置1と、所定のサンプリング時間間隔で、アップビート周波数とダウンビート周波数とのペアリングを行うペアリング処理部2と、組み合わせたアップビート周波数及びダウンビート周波数に基づいて、自車両から物標までの距離と、自車両と物標との相対速度とを求め、自車両の周囲の物標を検知する物標検知部3と、物標ごとに、次回のサンプリング時の予測データを求める予測処理部4と、を備え、ペアリング処理部2は、予測処理部4による予測データの確度の高い物標について優先的にペアリングを行う。
(もっと読む)
車両の障害物検知装置
【課題】物標の位置をより正確に予測することができる障害物検知装置の提供。
【解決手段】自車両前方の物標を検知する障害物検知手段11と、検知物標の情報を受け、自車両の作動機器を制御する作動機器制御手段12とを備え、障害物検知手段11は、所定のサンプリング時間ごとに、物標のまでの距離と、物標との相対速度と、物標の方角とを含む物標データを抽出する物標データ抽出部111と、物標データに基づいて、次回のサンプリング時の物標位置を予測する物標位置予測部112と、検知物標の位置と予測物標の位置とを照合し、同一物標を識別する物標識別部113とを有し、物標データ抽出部111は、物標の横方向の速度成分を更に求め、物標位置予測部112は、相対速度とともに横方向の速度成分を使用して、物標の位置を予測する。
(もっと読む)
レーダ追跡装置及びその方法
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有するレーダ追跡装置である。 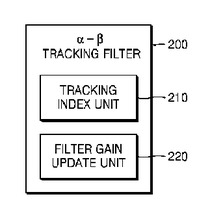 (もっと読む)
(もっと読む)
不均一にサンプリングされる正弦波信号の検出、及びそれを利用するドップラセンサ
不均一なインターバルでパルスを送信することによってドップラセンサが動作する。物体から反射したサンプルは、各サンプルを第1の係数cxk及び第2の係数sxkで乗算することによって処理され、それらの積を個別に合算して2つの指標が形成され、その指標が、特定のドップラ周波数fxを示す物体が検出されているか否かを判定するために調べられる。そのサンプルは、不均一な間隔の時刻txkにおいて生じ、時刻txkにおいてサンプリングされる周波数fxの余弦波の平均が実質的に0になるように、且つその時刻txkにおいてサンプリングされる周波数fxの正弦波の平均が実質的に0になるように生じる。 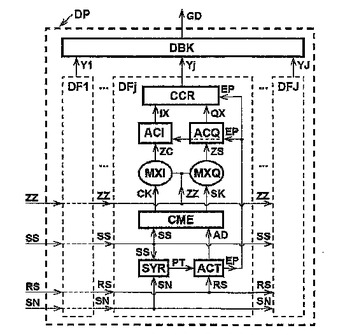 (もっと読む)
(もっと読む)
レーダ装置および距離測定方法
【課題】高速の回路を使用することなく、目標物までの距離を高精度に測定する。
【解決手段】送信信号生成部1は、略非周期性の疑似ランダム信号である送信信号を生成する。電磁波を送信信号で変調した送信波を送信部2から放射し、受信部3で反射波を受信する。位相限定相関演算部5は、送信信号と受信信号に1次元離散的フーリエ変換を施す第1のフーリエ変換部と、フーリエ送信信号とフーリエ受信信号を合成する合成処理部と、合成フーリエ信号の振幅を抑制する振幅抑制処理部と、振幅抑制処理後の合成フーリエ信号に1次元離散的フーリエ変換又は1次元離散的逆フーリエ変換を施す第2のフーリエ変換部と、相関信号のピーク位置に基づいて遅延時間を求める遅延時間検出部と、遅延時間を基に物体までの距離を算出する距離算出部とを備える。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、座標系制御部6は、観測値用座標変換部に入力される観測値に応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する。
(もっと読む)
高速フーリエ変換と加算平均による速度の測定方法
【課題】 ランダム雑音を減らすことができ、移動体の速度を高い精度で確実に決定できる高速フーリエ変換と加算平均による速度の測定方法を提供すること
【解決手段】 移動体からの散乱波は所定時間毎のサンプリングにより数値列d1へ変換し、数値列d1には所定サンプル数について高速フーリエ変換を行って周波数スペクトルを求め(s1)、次に周波数スペクトルから最大ピークおよび候補となる複数の周波数を選出し(s2)、選出した周波数についてそれぞれの該当周期により数値列d1を分割して(s3)、当該分割単位で加算した後に平均値を求める同期加算平均の処理を行い(s4)、当該同期加算平均による第2数値列d2にはそれぞれ所定サンプル数について高速フーリエ変換を行って第2周波数スペクトルを求め(s5)、それら第2周波数スペクトルから最大ピークを選出し、この最大ピークの周波数が速度の真値であると決定する。
(もっと読む)
レーダ画像処理装置及びレーダ画像処理方法
【課題】地表面の変化を正確に抽出することができるレーダ画像処理装置及びレーダ画像処理方法を提供する。
【解決手段】通信インターフェース部10が、異なる時刻に取得された同一観測対象の複数のレーダ画像データを取得してレーダ画像保持部12に格納し、位置合わせ処理部14が、上記複数のレーダ画像データをレーダ画像保持部12から読み出し、各レーダ画像データを相互に位置合わせする。次に、特性値算出部18が位置合わせ後のレーダ画像データから観測対象である地表の状態を表す複数の特性値を算出する。変化候補域抽出部34は、上記特性値毎に変化候補域を抽出し、判別法決定部24が決定した閾値、抽出条件及び判別関数を使用して、判別部36が上記変化候補域から観測対象の変化域を抽出する。
(もっと読む)
電磁波による鉄筋コンクリート構造物の非破壊検査装置及び方法
【課題】 内部に鉄筋が埋め込まれた鉄筋コンクリート構造物のクラック、空洞等からの反射波信号をより確実に検出する。
【解決手段】 内部に鉄筋9が埋め込まれた鉄筋コンクリート構造物6の表面上の複数位置に移動可能な検査装置本体1と、検査装置本体に搭載され、鉄筋コンクリート構造物に向けて電磁波を照射する電磁波照射手段2と、検査装置本体に搭載され、前記電磁波照射装置から照射された電磁波の反射波信号を取得する受波手段3と、受波手段によって取得された反射波信号を信号処理することによって鉄筋コンクリート構造物の欠陥を検出する信号処理手段4とを有し、受波手段は、検査装置本体の移動にともなって、位置の異なる複数の反射波信号を取得し、信号処理手段は、前記受波手段によって取得された位置の異なる複数の反射波信号を加算又は平均することによって前記鉄筋からの反射波信号成分を低減し、鉄筋コンクリート構造物の欠陥を検出する。
(もっと読む)
電磁妨害波測定システムと、それを用いた選別システム
【課題】広帯域にわたる妨害波の振幅確率分布の測定を複数の周波数帯に分割して一括で行い、測定結果をわかり易く表示するデータを出力する電磁妨害波測定システムと、それを用いた電子・電気機器の選別システムを実現する。
【解決手段】電磁妨害波測定システムは、電波信号を入力し、入力信号から測定しようとする周波数帯域の信号を選択し、その出力信号を周波数変換してデジタル信号に変換し、複数の周波数の信号を選択し、信号処理を行なってそれぞれの振幅確率分布を得て、出力するデータを選択して出力する。ここで、振幅確率分布の作成には、選択された複数の周波数の信号を量子化してその統計分布を求め、指定された周波数ごとの信号強度と強度頻度との組を出力する。上記の量子化の開始時間と終了時間は、それぞれの振幅確率分布作成手段について共通として、同一時間の測定データを得る。
(もっと読む)
状態変化検出装置および状態変化検出プログラム
【課題】監視対象の状態ベクトルを用い、F検定で状態変化を検出する方法では、観測対象が状態を変えてから観測者がその変化を検出するまでに多くの時間を要した。
【解決手段】監視対象の観測値と推定観測値との残差を計算し、監視対象が状態を変えていないモデルと、監視対象が状態を変えているモデルを定式化し、両者のAIC(赤池情報量規準)を演算して、AICが小さい側のモデルを、より尤もらしいと判断することで、短時間でも監視対象の状態変化を検出する事が可能となる。
(もっと読む)
目標表示装置及び目標表示方法
【課題】目標対象を効率良く探知することを可能とする。
【解決手段】目標情報データベース12aには、探知目標入力装置により探知された目標対象の目標情報が記憶される。CPU11は探知する目標対象の種類と探知期間とを指定する探知条件にしたがって目標情報データベース12aから目標情報を抽出する。この抽出された目標情報に基づいて、CPU11は目標対象の探知頻度を表す重複度を算出して重複情報データベース12bに記憶する。そして、CPU11は、重複情報データベース12bに記憶された重複度をもとに目標分布を作成し、目標分布を包含する地図情報を地図データ12cから読み出し、目標分布を地図上に重畳したデータを表示出力I/F16から出力する。
(もっと読む)
レーダ
【課題】高い検知確率と低い誤検知確率を併せ持ち、距離に応じた検出精度と応答性が確保できるようにしたレーダを構成する。
【解決手段】複数の計測タイミングで取得された探知情報のうち同一反射体に起因して生じたものと予測した探知情報を基にして反射体に相当する物標の追尾を行うとともに、追尾中の物標が同一反射体に起因して生じたものと見なされる度合いを表す追尾信頼度(計測タイミングの回数MとそのM回の計測タイミングで取得された探知情報のうち同一反射体に起因して生じたものと見なされる回数N)の条件を複数組設定し、いずれか1つが満足されるとき、その反射体を真物標として検知する。
(もっと読む)
車両用障害物検出装置及び車両制御システム
【課題】検出対象とする障害物が低速で移動する場合であれ、その移動態様を的確に判定する車両用障害物検出装置及び車両制御システムを提供する。
【解決手段】レーザレーダ装置により検出される自車両から障害物までの距離及び自車両を基準とした障害物が位置する方位に基づき、自車両を基準とした障害物の相対位置を所定の周期で検出する。また、車速センサにより検出される自車速、ステアリングセンサにより検出される操舵角、及びヨーレートセンサにより検出されるヨーレートに基づき自車両の移動量を算出し、先に求めた相対位置にこの移動量を加味することで障害物の絶対位置を算出する。そして、障害物の絶対位置のばらつきの広がりに応じた大きさの値を返す評価関数を通じてばらつき度合Pdを算出し、このばらつき度合Pdに基づき障害物の移動態様を判定する。
(もっと読む)
レーダ装置および類似装置
【課題】物標とレーダ干渉やホワイトノイズ等の不要波とを識別して、異なる表示形態で表示するレーダ装置を実現する。
【解決手段】減算フラグ発生部6は、対象とするエコーデータの時間的継続性と平面的連続性とを判定する。時間的継続性は、同じ位置にどれだけ有意なエコーデータが存在し続けたかを示す量であり、過去所定スイープ回転回数分のエコーデータから得られる。平面的連続性は、対象とするエコーデータの周りにどれだけ有意なエコーデータが存在するかを示す量であり、対象エコーデータを中心に距離方向および方位方向に所定量ずつのエコーデータを平面的に取得することで得られる。減算フラグ発生部6は、時間的継続性と平面的連続性のいずれかがあると検出すると減算フラグ「1」を添付する。減算処理部9は、減算フラグが「1」ならばデータレベルの減衰量を低くし、「0」ならば速くする。
(もっと読む)
361 - 380 / 535
[ Back to top ]