
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
241 - 260 / 535
物体識別装置及び物体識別方法
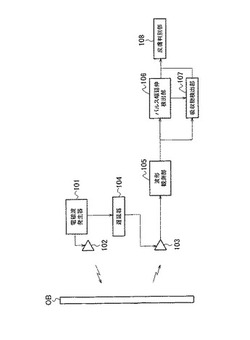
【課題】歩行者等の人物が計測対象物であっても確実に計測対象物を検出して識別することができる物体識別装置を提供する。
【解決手段】物体識別装置は、電磁波発生器101及び送信器102を用いて送信されて計測対象物OBによって反射した電磁波を受信器103によって受信すると、その受信信号の波形に基づいて、計測対象物OBに電磁波の吸収物が含まれている旨を吸収物検出部107によって検出し、吸収物検出部107によって検出された吸収物を含む計測対象物OBの種類を皮膚判別部108によって判別する。
(もっと読む)
信号処理装置、及びレーダ装置

【課題】周波数成分を平滑化してピーク周波数を求め、各ビート信号におけるピーク周波数のビート信号を用いて方位角を検出する場合に、誤検出を防止する。
【解決手段】 ピーク周波数検出手段が、ビート信号群の周波数成分を平滑化したときに極大値が形成されるピーク周波数を検出し、ビート信号抽出手段が、前記ビート信号群から、前記ピーク周波数を含むピーク周波数帯域における周波数成分の状態が所定の条件を満たすビート信号を抽出し、方位角検出手段が、前記抽出された抽出ビート信号のうち、第1の抽出ビート信号に含まれる前記ピーク周波数のビート信号と、第2の抽出ビート信号に含まれる前記ピーク周波数のビート信号との位相差に対応する方位角を検出するので、同一物体から得られたビート信号を用いて方位角検出ができる。よって、誤検出を防止できる。
(もっと読む)
無線自動識別タグの位置を推定及び追跡するシステム並びに方法
1又は複数の無線自動識別(RFID)タグの位置を特定するシステム及び方法が提供される。照射されたRFIDタグの受信情報信号の位相差は、RFIDタグの位置を特定するために使用される。1又は複数のエキサイタは、RFIDタグを照射するように呼出信号を送信し、このエキサイタは、複数のアンテナを有し、2又は複数のアンテナを介して選択的に送信するように構成され、かつ1つのアンテナで受信するように構成される。同一RFIDタグの複数読み取りはまた、RFIDタグの位置の確率モデルを作成するように行われてもよい。拡張粒子フィルタは、正確なRFIDタグの位置を求めるために確率モデルに適用される。 (もっと読む)
レーダ装置
【課題】3種類以上の周波数変調を用いることで、各周波数変調で検出されたピークビート周波数の順番や振幅、位相情報といったものを使用せずに、正しい組み合わせを求めることができるレーダ装置を得る。
【解決手段】4種類の周波数変調を重畳した送信周波数を持つ送信信号を生成する信号発生器1と、前記送信信号を分割する分配器2と、分割された送信信号を空間へ放射する送信アンテナ3と、目標で反射された受信波を取り込む受信アンテナ4と、分配器2からの送信信号と受信アンテナ4からの受信信号を混合してビート信号を生成するミキサ5と、前記ビート信号をアナログ信号からデジタル信号に変換するA/D変換部6と、A/D変換部6からのビート信号に基づいて前記目標までの距離及び前記目標の速度を求める信号処理部7とを設けた。
(もっと読む)
推定装置
【課題】前方車両の形状及び運動状態を正確に推定する。
【解決手段】推定装置は、レーダ波によって、前方車両表面の複数地点の位置座標を計測し(S110)、この複数地点を単一線分及び二線分で近似する(S120,S1300)。そして、各線分毎に、求めた線分長さ及び近似誤差に基づき、線分が車両前後面、側面を近似した線分である事前確率を算出する(S1400)。一方、過去において推定された前方車両の位置、向き、速さ、進行方向及び角速度の情報を基に、尤度を算出する(S1500)。そしてベイズ推定により、既に求めた事前確率と尤度とから、各線分毎に、線分が車両前後面、側面を近似した線分である事後確率を算出し(S1600)、前方車両のサイズ、位置及び向きを推定する(S1700)。また、これらの情報を基に、アンセンテッドカルマンフィルタにより、車両の速さ、進行方向及び角速度も合わせて推定する(S1800)。
(もっと読む)
車両傾斜検知装置
【課題】温度変化や風や騒音があっても傾斜角度を精度よく検知することができる車両傾斜検知装置を得ることを目的とする。また、受信信号レベルの偏位があっても傾斜角度を精度よく検知することができる車両傾斜検知装置を得ることを目的とする。
【解決手段】車両に設置され、所定の周波数、振幅、位相を持つ送信信号を送信アンテナから電波にして放射する送信手段と、地面で反射した電波を2つの受信アンテナで受信し第1の受信信号と第2の受信信号として取り出し送信手段からの送信信号と第1の受信信号で直交検波して得た信号から第1の振幅値と第1の位相値を算出し送信手段からの送信信号と第2の受信信号で直交検波して得た信号から第2の振幅値と第2の位相値を算出する受信手段と、算出された振幅値と位相値に基づいて車両の地面に対する傾斜角度を算出する傾斜角度演算手段を備えたことを特徴とする車両傾斜検知装置。
(もっと読む)
多目標追尾装置
【課題】追尾の難易度に応じてアルゴリズムの切り換えを行うことができる多目標追尾装置を得る。
【解決手段】前観測時刻でMHT追尾処理を実行する第1の条件、及び前観測時刻で追尾が困難であると判定する第2の条件を満たす場合は、センサ1からの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、MFA処理で相関解を生成するMFA追尾処理部4と、前記第1及び第2の条件の何れかの条件を満たさない場合は、センサ1からの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部2と、MHT追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部3と、MFA追尾処理部4で生成された相関解をMHT追尾処理部2の仮説として置き換えるMHT仮説設定部5とを設けた。
(もっと読む)
レーダークロスセクション測定システム
【課題】航空機等のレーダークロスセクションの測定を対象物からの近傍界で行え、かつ小さなアンテナで行えるようにする。
【解決手段】複数の小さなアンテナの集合によって、大きなアンテナを形成し、コンパクトレンジ法を実現する。そして、小さなアンテナ間の補正のために対象物またはアンテナを移動させて、小さなアンテナ間のデータを補正する。
(もっと読む)
信号レベル判定装置及び信号レベル判定方法
インパルス性雑音を含む背景雑音が存在する中で信号をロバストに検出するための装置及び方法が開示される。信号の各値は、2次元空間内の直交軸上の2つの座標によって定義される半円上の点にそれぞれマッピングされる。変換された各点の2つの座標からそれぞれの平均が計算され、それぞれの2つの平均を用いて半円上の点の平均方向が計算される。平均方向は信号領域内に逆マッピングされ、検出閾値と比較される。検出閾値は、半円上の点の密度に基づいて設定されてもよい。 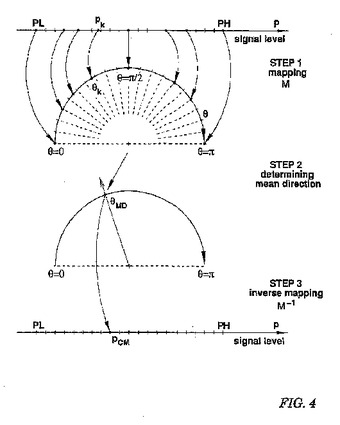 (もっと読む)
(もっと読む)
路面下空洞の探査方法
【課題】反射信号を適切に処理することによって路面下の空洞の判別を容易にする。
【解決手段】反射信号を受信し、反射信号から空洞に基づく反射波以外の反射信号のうち、舗装構造や地下構造等による連続して共通的に受信される反射信号を除去して空洞に固有の信号を抽出し、所定区間(B)の反射信号をその区間における最大値に基づいて無次元化し、無次元化した信号からエネルギーが集中している所定規模以上の信号を抽出し、空洞上面からの反射信号に固有の極性を有することによって空洞として判別する。更に、当該反射信号、反射信号を所定区間(A)において平均化した信号が空洞特有の反射信号を呈している場合、または所定区間(A)での空洞特有の反射信号の連続性等が認められる場合に空洞と判定する。
(もっと読む)
レーダ装置、レーダ装置の信号処理方法及び、車両制御システム
【課題】方位ばらつきが大きい場合であっても、物標のトラッキングを精度良く行なうことができるレーダ装置を提供する。
【解決手段】互いに間隔が異なる三本以上の素子アンテナ15のうち、任意の二本の素子アンテナ対で受信された反射波の位相差から物標の方位候補を二つ算出する方位算出部と、方位算出部で算出された二つの方位候補の夫々についてトラキング処理を行なうトラッキング処理部と、誤差が小さい方の方位候補によるトラッキング処理の結果に基づいて物標情報を出力する物標情報出力部として機能するCPU11を備えているレーダ装置10。
(もっと読む)
目標検出装置
【課題】高速目標が小目標であっても目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路1と、CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路2と、CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路3とを備え、2次元DWT回路の出力に基づき目標を検出する。
(もっと読む)
時間領域法を用いた二重偏波レーダ処理システム
本発明の実施形態では、二重偏波レーダシステムにおける環境パラメータの改良された推定を提供する。いくつかの実施形態では、環境パラメータは、2つの直交する偏波状態において受信されたデータの線形結合を用いて推定されうる。特に、発明の実施形態は、二重偏波レーダシステムにおける地上反射波及びノイズの低減を改良する。さらに、発明の実施形態はまた、二重偏波レーダシステムにおける、反射率の差及び/または同極の相関係数の大きさの少なくともいずれか、及び位相差を決定するためのシステムを提供する。 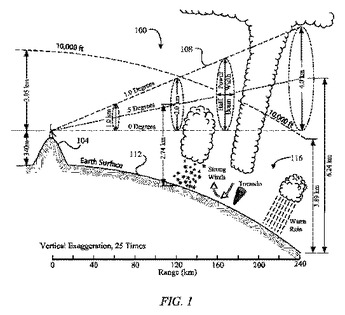 (もっと読む)
(もっと読む)
存在・動き検出用受動レーダー
受動検出器(10)は、環境中の受動的放射(12)を収集するよう構成された受信機(11)を含む。ここで、前記受動的放射の一部についての詳細な情報が受動的エネルギーのベースラインとして推定される。受動的エネルギーは、当該検出器と無関係の受動的源によって生成される。モニタ(24)が、ベースラインにおけるゆらぎを測定するよう構成される。ゆらぎが環境における存在または動きを表すかどうかを判定するために、モニタに判断モジュールが結合されている。検出方法も開示される。 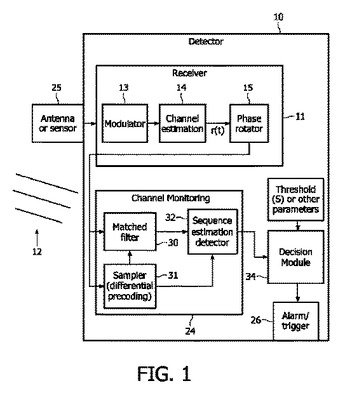 (もっと読む)
(もっと読む)
受信装置及び信号処理システム
【課題】スパイク電圧の発生を防止し、応答速度の低下を防止することができる受信装置を提供することを課題とする。
【解決手段】電波を受信するアンテナ(101)と、前記アンテナを介して受信した信号を検波して出力信号を出力する検波器(111)と、制御信号に応じて、前記アンテナから受信した信号を前記検波器に入力可能な第1の状態と第2の状態とを制御する状態制御部(102)と、前記制御信号のエッジ部を検出した時には、前記制御信号のエッジ部に対応する前記検波器の出力信号を破棄し、前記制御信号のエッジ部を検出しない時には、前記制御信号のエッジ部でない部分に対応する前記検波器の出力信号を残すエッジ部処理部(112)とを有する受信装置が提供される。
(もっと読む)
同一航跡判定装置
【課題】仮説生成前に同一性を判定できる見込みを推定し、見込みのあるものに対してのみ計算を実行することにより、計算機資源を有効利用し、単位時間に多くの相関結果を出力することができる同一航跡判定装置を得る。
【解決手段】従来の同一航跡判定装置の尤度算出部9に仮説生成判定部10を取りつけ、仮説生成判定部10が、仮説生成を行う前に信頼度の大きな仮説を2つ事前に抽出し、仮説が絞り込めないときに抽出した仮説の比が一定値以上となることを利用して仮説生成の有無を判定し、仮説が絞り込める可能性のある場合には、仮説生成部11に仮説の生成を行わせ、仮説が絞り込める可能性がない場合には、仮説生成部11に仮説の生成を行わせない。
(もっと読む)
自動車レーダ・センサ閉塞検出装置および方法
自動車レーダ・システムにおける側方物体検出(SOD)センサのようなセンサにおいて用いる閉塞検出システムおよび方法について記載する。このセンサは、信号を放出し、通過する物体からの戻り信号(即ち、反射信号)を受信する。通過する物体が仮想検出ゾーンの中にある場合、センサは通過する物体からの情報を用いて、閉塞状態がセンサ内に存在するか否か判定する。この技法は、通過する物体に関係する統計を利用して、センサ内に閉塞状態が存在するか否か判定する。一実施形態では、第1車両内に装備されたSODセンサが、第2の通過する車両からの情報(例えば、レーダ戻り情報)を用いて、SODセンサ自体の中に閉塞状態が存在するか否か判定する。 (もっと読む)
ウェイト算出方法、ウェイト算出装置、アダプティブアレーアンテナ、及びレーダ装置
【課題】 パルスレーダ装置において、受信信号の位相及び振幅に対するウェイトをスライディングウィンドウ方式によって計算するための共分散行列データの導出に要する計算量を軽減する。
【解決手段】 受信データ蓄積状況を監視し(ステップS1)、iが1からLになるまで、第i番目のレンジセルの共分散行列Ri を算出して一時保存する(ステップS2〜S5)。次に、iが1からTになるまで、該当トレーニングサンプル数分の共分散行列データRi を呼び出し、足し込んで平均をとり、その平均共分散行列データR[1]rrを一時保存する(ステップS6〜S10)。続いて、iが2からLになるまで、平均化された共分散行列データR[i-1]rrを呼び出し、R[i-1]rrにRi ,Ri-4を足し込み、R[i-1]rrからRi+3 ,Ri-1を差し引いて、その結果のR[i]rrデータを一時保存し(ステップS11〜S16)、一連の処理を終了する。
(もっと読む)
物体認識装置及びレーダ装置
【課題】レーダ装置外部から電磁波が作用することに起因するノイズがレーダ信号等に混入した場合に、物体の誤認識を防止する。
【解決手段】所定角度範囲に対し送信されたレーダ信号と物体により反射された前記レーダ信号との周波数差信号に基づき前記物体を認識する物体認識装置は、単位角ごとに前記周波数差信号のレベルのピークを検出するピーク検出処理と、複数の前記ピークから相互に所定の周波数範囲内にあるピーク群を検出し、前記ピーク群のうちピークのレベルが極大値を形成するピーク群を前記物体として認識する物体認識処理とを行い、前記物体認識処理では、前記ピーク群に含まれるピークの数が基準ピーク数以下であり、且つ当該ピークのレベルが基準レベル以上であるという条件が満たされ、当該ピークがノイズによる蓋然性が大きいときには、当該ピーク群を前記物体として認識しないので、誤認識を防止できる。
(もっと読む)
電磁波及び/又は弾性波にさらされたオブジェクトの三次元合成再構成の方法
電磁波及び/又は弾性波にさらされたオブジェクトを、感知信号(特にノイズの多い弱信号)に基づく有用な三次元情報の識別によって、合成的に再構成する方法である。この方法は、判定基準(2)、(3)、(4)、(6)、(7)、及びグリッド(5)を、知識ベース(1)から抽出するステップ(A11)、(A12)、(A2)、(A31)、(A32)、(A4)と、判定基準(2)によってフィルタリングされた感知信号(8)から、弱信号(9)を抽出するステップ(B1)と、判定基準(3)によってフィルタリングされた弱信号(9)から、問題の弱信号(10)を抽出するステップ(B2)と、問題の弱信号(10)からノイズを除去して増幅し(B3)、有用な弱信号(11)を取得するステップと、判定基準(4)によってフィルタリングされた有用な弱信号(11)から、有用な直接情報(12)を識別し(C)、最適な判定基準(2’)及び(3’)を与えるステップと、グリッド(5)によってフィルタリングされた有用な直接情報(12)を使用して、問題の情報(13)を再構成し(D1)、最適なグリッド(5’)を与えるステップと、判定基準(6)によってフィルタリングされた問題の情報(13)を使用して、有用な情報(14)を再構成し(D2)、最適な判定基準(6’)を与えるステップと、判定基準(7)によってフィルタリングされた有用な情報(14)に基づいて、オブジェクトに関する三次元情報(15)を再構成し、認識状態ファイル(16)を与え、最適な判定基準(7’)を与えるステップと、知識ベース(1)において、判定基準(2)、(3)、(6)、(7)、及びグリッド(5)を、最適な判定基準(2’)、(3’)、(6’)、(7’)、及び最適なグリッド(5’)で更新する(E1)、(E2)、(E31)、(E32)、(E4)か、又は判定基準(2)、(3)、(6)、(7)、及びグリッド(5)を変更するステップと、を含む。この方法は、工業、医療、保安、及び防衛におけるリスク管理及びパフォーマンス管理用に問題のオブジェクトを識別する目的で設計されたものである。 (もっと読む)
241 - 260 / 535
[ Back to top ]