
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
261 - 280 / 535
レーダ装置、及び、車両制御システム
【課題】方位ばらつきが大きい場合であっても、コストの増大を招くことなく、物標の方位を精度良く算出できるレーダ装置を提供する。
【解決手段】互いに間隔が異なる三本以上の素子アンテナ15のうち、任意の二本の素子アンテナ対で受信された反射波の位相差から物標の方位候補を複数求める処理を各素子アンテナ対に対して行なう方位候補演算部と、前記方位候補演算部で算出された単一または複数の方位候補に対応するデジタル・ビーム・フォーミング演算を行なうDBF演算部と、前記DBF演算部で算出されたDBF値に基づいて前記物標の方位を確定して出力する方位演算部として機能するCPU11を備えているレーダ装置10。
(もっと読む)
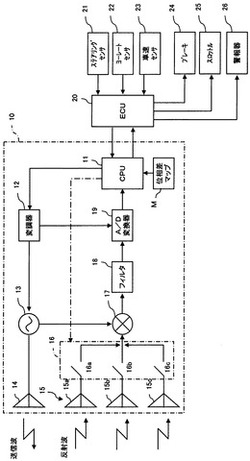
走査型測距測角センサ用データ処理装置

【課題】処理能力の制約や移動体の運動や動揺に関わらず移動体と対象物間の相対距離と相対姿勢を高速,高精度に取得する。
【解決手段】開示される走査型測距測角センサ用データ処理装置は、受信強度信号10と距離計測信号11とAZ角度計測信号12を生成する2軸駆動型測距/測角センサ1と、有効強度信号14と有効距離信号18と有効AZ角度信号19と有効EL角度信号20を生成するデータ切り出し処理器2と、データインデックス信号15を生成する有効データ2値化処理器3と、データ集中度インデックス信号16を生成するデータ集中度判定処理器4と、グループ化データインデックス信号17を生成するデータグルーピング処理器5と、ターゲット距離信号21とターゲットAZ角度信号22とターゲットEL角度信号23とグループデータ個数信号24を生成するターゲット抽出/距離・角度生成器6と、その各信号を格納する測距/測角データ格納メモリ7を備える。
(もっと読む)
レーダシステム
【課題】レーダシステム起動時でも早期に物体検出を行う。
【解決手段】。パルスレーダ1は、外部へ送信パルスを送信し、ターゲットで反射された送信パルスを受信波形として受信する。記憶部2は、レーダシステム10の近傍に物体が存在しないとみなせる状態において、パルスレーダ1が受信した基準波形を記憶する。入力部3は、レーダシステム10の起動時において、パルスレーダ1が受信した入力波形を取得する。比較部4は、記憶部2に記憶された基準波形と、入力部3で取得された入力波形との比較結果に応じて、レーダシステム10の起動時における物体の有無を検出する。
(もっと読む)
探知測距装置および探知測距方法
【課題】探知測距装置において、角度推定の前段に行われる目標数推定の計算負荷を軽減し、且つ、推定精度を向上させる。
【解決手段】擬似空間平均共分散行列生成部104b−6は、Rf1、Rf2、Rb1、Rb2から、適切な行列を一つ選択するか、適切な行列を2つ以上選択して組み合わせて、擬似空間平均共分散行列Rを生成する。擬似空間平均共分散行列エルミート共役積生成部104c−1は、目標数推定用行列RRHを生成する。目標数推定用行列分解部104c−2は、RRHにLU分解を施して下三角行列Lと、上三角行列Uとに分解する。指標生成部104d−1は、この上三角行列Uの要素を用いた指標を生成する。指標パラメータ走査処理部104d−2は、指標生成部104d−1によって生成された指標を用いて目標数mを推定する。
(もっと読む)
レーダ装置
【課題】物標が存在する可能性が高い場合に、物標が存在すると判定するタイミングを早めることができるレーダ装置の提供。
【解決手段】レーダ波を送信する送信部と、物標で反射されたレーダ波の反射波を受信して受信信号を発生する受信部と、受信信号と送信信号からビート信号を生成するビート信号生成部と、ビート信号のピーク周波数を抽出しビート信号のピーク周波数におけるピーク強度を求める周波数解析部と、ピーク周波数およびピーク強度に基づき、物標の存在確率を測定サイクル毎に求める存在確率算出部と、算出された存在確率が所定値に達したとき、物標が存在すると判定する存在判定部とを備え、存在確率算出部は、ビート信号のピーク強度が第1の閾値以上第2の閾値未満(第1の閾値<第2の閾値)であるとき存在確率を第1の値で増加させ、ビート信号のピーク強度が第2の閾値以上であるとき存在確率を第2の値(第1の値<第2の値)で増加させる。
(もっと読む)
暴風雨を動的及び適応的に追跡するレーダ
大気条件を予測する方法及びシステムが発明の実施形態にかかり開示される。1つの実施形態では、方法は大気により反射されたデータを受信する工程と、大気により反射されたデータを用いて、動き係数を求める運動方程式を解く工程と、を含む。さらに、動き係数及び大気により反射されたデータを用いて、今後の大気条件が予測される。発明の他の実施形態では、運動方程式は周波数領域で解かれる。様々な線形回帰手段が、係数を解くために用いられ得る。システムの他の実施形態では、レーダシステムは、スペクトル運動方程式を解くことにより今後の大気条件を予測することが開示される。 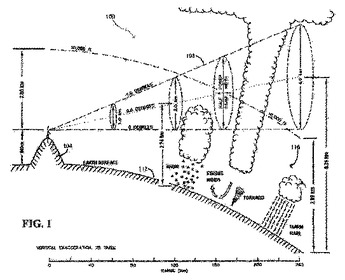 (もっと読む)
(もっと読む)
目標検出装置、目標検出方法及び目標検出プログラム
【課題】レーダセンサを用いて受信した信号から目標を検出する場合に、SN比が低い条件の下であっても、早期に目標を検出することを目的とする。
【解決手段】目標検出装置は、レーダセンサが行った複数回のスキャン処理の各スキャン処理で得た信号の積分路を探索して目標を検出する。特に、各スキャンで得た信号から生成されたディジタルビデオ信号を所定の数の分解能セルを有するブロックに分割して、ブロック間で積分路の探索を行うとともに、ブロックに目標が含まれる可能性を示す評価値に基づき目標を検出する。
(もっと読む)
追尾装置及びプログラム及び追尾方法
【課題】複数の異なるセンサ装置が目標を観測した結果に基づいて、目標を追尾する。
【解決手段】トラック記憶部181は、複数のセンサ装置それぞれが観測した目標に関する情報を表わす複数のトラックデータを記憶する。トラック記憶部181が記憶したトラックデータが更新された場合、優先度算出部141は、更新されたトラックデータの優先度を算出する。共通データ更新部144は、優先度算出部141が算出した優先度が高い場合に、更新されたトラックデータを、共通データ記憶部182に共通データとして記憶させる。
(もっと読む)
受信パルス無線信号内の狭帯域干渉をフィルタリングする装置及び方法
【課題】パルス広帯域無線信号及びパルス超広帯域(UWB)無線信号内の狭帯域干渉(NBI)を低減することができるティーガ−カイザエネルギー検出(TKED)受信機を得る。
【解決手段】受信パルス無線信号内の狭帯域干渉が、まず非線形フィルタを使用して当該狭帯域干渉をより低い周波数にシフトし、シフトされた信号を、パルス無線信号内のエネルギーを検出する前にハイパスフィルタを通過させることによって、除去される。パルス無線信号は超広帯域信号であることができ、非線形フィルタはティーガ−カイザエネルギー演算子を使用することができる。
(もっと読む)
運動クラス類別装置及び追尾処理装置
【課題】運動クラスの異なる複数の追尾フィルタのフィルタ処理結果に含まれる観測誤差の影響を低減して、目標の運動クラスに関する類別情報の確度を向上させた運動クラス類別装置、及びこの類別情報を用いて目標の追尾情報の確度を向上させた追尾処理装置を得る。
【解決手段】異なる運動クラス毎に設けられた複数のクラスフィルタにより観測ベクトルをフィルタ処理したクラス尤度を時系列に記憶しておき、最新の観測におけるクラス尤度を分析して分析尤度を導出する際は、この時系列の記憶内容を参照していずれかのクラス尤度が時間的に連続して所定のしきい値を超えた場合には各クラスフィルタで算出したクラス尤度を、またそれ以外の場合には所定の固定値を採用し出力することにより、時間的に連続しないような観測誤差等がクラス尤度に与える影響を低減するとともに、さらにその後段でのクラス確率算出時における誤差の累積を減らす。
(もっと読む)
変調後方散乱を用いてのタグ付き資産の所在地推定方法および所在地推定システム
資産タグと1または複数のマーカータグとから変調後方散乱を用いて、資産の所在地を決定する方法とシステム。システムは、読取機と、所在地決定モジュールと、1または複数のマーカータグとを有する。資産タグのための所在地推定は、マーカータグそれぞれの所在地の事前情報に部分的に基づき決定される。所在地決定モジュールは、1または複数のマーカータグと、資産タグとから受信した変調後方散乱信号の推定されたパラメータを用いて、資産タグの所在地推定を決定する。マーカータグの既知の所在地を用いて、資産タグの所在地推定は決定されうる。所在地推定は、相対的所在地や絶対的所在地でありえ、および/または資産タグの所在地推定は、マーカータグを有するゾーンでありうる。マーカータグを用いる可動式読取機は、広い範囲に亘って資産タグ所在地を決定でき、たとえば広い範囲に亘って資産を在庫調査しうる。 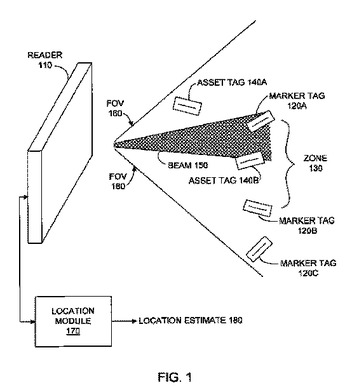 (もっと読む)
(もっと読む)
波源探査装置、波源探査方法、及び波源推定方法
【課題】波源の有無を容易に探査する波源探査装置、波源探査方法、及び波源推定方法を提供することを課題とする。
【解決手段】電磁波の受信強度を測定する測定回数と、測定を行う測定間隔と、波源の存在を通報する通報条件とを夫々対応付けて蓄積しておき、少なくとも各周波数を含む周波数範囲の電磁波をアンテナで受信し、受信した周波数範囲の電磁波のうち任意の周波数に対応する測定回数及び測定間隔に基づいて電磁波の受信強度を測定し、受信強度を測定回数で平均化した平均受信強度を求めることを周波数範囲の各周波数に対して繰り返し、各周波数に夫々対応する各通報条件と、各周波数に対して夫々測定された各平均受信強度とを夫々比較し、平均受信強度が通報条件を満たす場合に波源の存在を通報する。
(もっと読む)
センサ情報融合装置
【課題】2D角度観測値を用いた距離推定値初期値と距離変化率推定値初期値の高精度化、2D角度観測値を用いたバッチ処理後の距離推定値と距離変化率推定値の高精度化を可能にする。
【解決手段】センサによる2D角度観測情報に基づいて2D角度航跡を算出する2D角度追尾手段と、2D角度観測情報と2D角度航跡について事前設定された圧縮間隔に基づいて最小2乗統合により圧縮処理して統合2D角度観測情報を算出する2D角度観測情報圧縮手段と、3点の統合2D角度観測情報に基づいて距離推定値初期値および距離変化率推定値初期値を算出する距離推定値初期値算出手段と、上記算出初期値を初期値として、2D角度観測情報を事前に設定したバッチデータ数分蓄積してバッチ処理して距離推定値および距離変化率推定値を算出する距離算出バッチ処理手段を備える。
(もっと読む)
コンピュータを援用してセンサデータから物体の運動を計算する方法
本発明は物体に取り付けられたセンサのセンサデータからコンピュータを援用して物体の運動を計算する方法に関する。前記センサデータは様々な時点に検出された、前記物体の周囲にある測定点から成る測定点集合を含んでおり、第1の時点に検出された第1の測定点集合と第2の時点に検出された第2の測定点集合の間での前記物体の運動が求められる。本方法はまず、前記第1および第2の測定点集合から、例えば直線分、円などのような構造要素の形態で構造情報を抽出し、いずれの構造タイプにも割り当てられない測定点とともに記憶する。続いて、同じ構造タイプを有する構造要素間の対応付けを求め、構造要素を互いに写像する変換を実行する。最後に、次のステップにおいて、割り当て不能な測定点と構造要素との対応付けと対応付けられた測定点と構造要素の相互の変換が行われる。本発明の方法により複合スキャンが形成され、この複合スキャンに基づいて物体の固有運動を求めることができる。構造要素および測定点の対応付けは有利には、センサの測定雑音を考慮した統計的手法によって行われる。本方法は例えばロボット、車両、クレーンなどのような自律移動システムの固有運動を算出に使用することが特に適している。 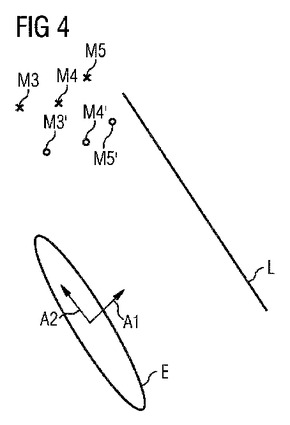 (もっと読む)
(もっと読む)
レーダ装置
【課題】アレーアンテナを用いた超分解能測距処理において、各素子受信信号より求めた相関行列を素子方向に平均化することで、目標信号間の相関を低減し測距精度等を改善したレーダ装置を提供する。
【解決手段】目標に向けて送信波を送信する送信手段1,2と、上記送信手段から送信された上記目標で反射した反射波を受信する複数の受信手段4,5と、上記複数の受信手段にそれぞれ設けられ、受信手段で得られた受信信号から測距処理を行うための相関信号の信号間の相関行列を算出する相関行列算出処理手段6〜10と、各上記相関行列算出処理手段から出力された相関行列を加算する加算手段11と、上記加算手段で得られた相関行列に基づき超分解能測距処理を行う超分解能測距処理手段12と、を備えた。
(もっと読む)
単回使用コンポーネントを含む製造システムへのRFIDセンサの組み込み
製造システムの物理的、化学的、および生物学的特性を測定するためのシステムおよび方法を提供する。方法は、複数のRFIDセンサを複数の対応する単回使用コンポーネント内に埋め込む。複数のRFIDセンサの各々は、複数の単回使用コンポーネントのうちの少なくとも1つのコンポーネントの多重パラメータ測定値を出力し、単回使用コンポーネントおよびその個々のRFIDセンサの同時点デジタル識別情報を出力する。本方法は、少なくとも1つのRFIDライタ/リーダを使用して、複数の単回使用コンポーネントの多重パラメータ測定値およびデジタル識別情報を読み取り、プロセッサを使用して、測定値を処理し、少なくとも1つのパラメータの測定値を所定の値と比較することによって、後続プロセス工程を制御する。 (もっと読む)
レーダ装置
【課題】処理負荷を低減できるレーダ装置を得る。
【解決手段】周波数の異なる複数のパルスを送信する多周波発信型送信機1及び送信アンテナ2と、受信アンテナ4からの受信パルスに帯域制限等を施して受信信号を出力する受信機5と、A/D変換器6からのディジタル信号から目標のドップラー周波数を推定し目標信号成分を検出する目標検出処理部7と、ドップラー効果により回転した目標信号成分の位相を補正するドップラー補正処理部8と、ドップラー補正処理部8からの受信信号を蓄えるメモリ回路9と、メモリ回路9からの受信信号に基づき送信周波数方向における受信信号間の相関行列を生成する相関行列生成処理部12と、相関行列に基づきMUSIC法により目標の測距値を求めるMUSIC処理部13と、測距値に基づき目標信号成分を信号再構成し目標の測角値を求める信号再構成併用型高精度測角処理部11を設けた。
(もっと読む)
物体速度検出装置
【課題】 対象物の移動速度を高精度に求めることができる物体速度検出装置を提供する。
【解決手段】 物体速度検出装置は、まずミリ波レーダの計測データから得られた相手車の位置情報について、αβフィルタを用いた位置微分を行って、相手車の車速を算出し(手順S104)、更にその車速に対して相手車予測軌道による速度上下限カットフィルタをかけることで、相手車の速度下限値及び速度上限値を決定する(手順S105)。また、物体速度検出装置は、相手車の位置情報に基づいた相手車の車速とは別に、ミリ波レーダの計測データから得られた自車と相手車との相対速度情報に基づいた相手車の速度を算出する(手順S106)。そして、物体速度検出装置は、位置情報から得られた相手車の車速と相対速度情報から得られた相手車の車速とを組み合わせて、最終的な相手車の車速を求める(手順S107)。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】MUSIC法や最小ノルム法などの固有展開を用いて到来波方向検出を行う際、可変ステップを小さくし、かつ角度検出の演算量を低減することが可能な電子走査型ミリ波レーダ装置及び受信波方向推定プログラムを提供する。
【解決手段】本発明の電子走査型レーダ装置は、移動体に搭載されるレーダ装置であり、送信波を送信する送信部と、送信波のターゲットからの反射波である到来波を受信する複数のアンテナから構成される受信部と、送信波及び反射波の差分の周波数を有するビート信号を生成するビート信号生成部と、時系列にビート信号を予め設定した分解数のビート周波数に周波数分解して複素数データを算出する周波数分解処理部と、複素数データからターゲットの存在する角度範囲を算出する角度範囲設定部と、角度範囲内における角度スペクトラムを算出する方位検出部とを有することを特徴とする。
(もっと読む)
航跡割当装置
【課題】組合せ最適化問題を解くメタヒューリスティックス手法を用いて航跡割当問題の一つであるMFA問題の解を高速に求める航跡割当装置を提供する。
【解決手段】測定して蓄積された移動体の航跡に関する観測データに基づき、予め定められた制約条件に違反しない複数の航跡候補を割当パターン群として生成し、この生成された割当パターン群を構成する各割当パターンに対し、航跡の始点に基づくグループに分類し、各グループの各割当パターンに対して一意の番号を付与する航跡候補群生成手段3,4と、各割当パターンに付与された番号に基づき、組合せ最適化を図るメタヒューリスティックス手法によって観測値を航跡に割り当てる航跡割当処理を行う航跡割当処理手段5〜10とを有することを特徴とする航跡割当装置にある。
(もっと読む)
261 - 280 / 535
[ Back to top ]