
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
221 - 240 / 535
到来方向推定装置
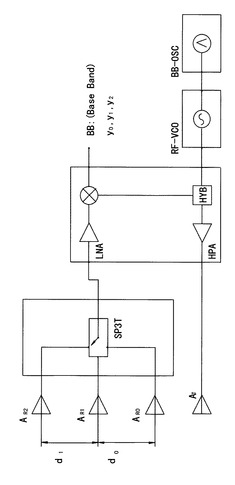
【課題】3つ以上のセンサあるいはアンテナを同時に使って、レーダ波等の到来方向を推定する。
【解決手段】レーダ波の到来方向を推定するための演算式は、sin-1(a×tan-1b)の形をしている。aは、アンテナ間隔dと使用するレーダ波のキャリア等の波長λで決まるd/λとなるが、3つ以上のアンテナを同時に使うことによって、aを第1のアンテナ間隔に基づく値d0/λと第2のアンテナ間隔に基づく値d1/λの差に依存する値にすることができる。したがって、到来方向の測定範囲を広く取ろうとする場合、アンテナの絶対間隔d/λを調整するのではなく、(d1−d0)/λを調整すればよいので、アンテナ設計上の制約が緩和され、到来方向の測定範囲を適切に設定する。
(もっと読む)
車両移動状況検出装置および車両移動状況検出方法

【課題】 自車両の進行に関する方位と対地車速を正確に検出し物体への接近を確実に回避する。
【解決手段】複数の側方監視用レーダ装置21,22を用いて、静止物体を識別する。静止物体RM1,RM2の方位および相対速度の検出値に基づいて空間的に密集して存在する物体を静止物体RM1,RM2と判定し、該判定された静止物体を成す物体(反射点)のうち自車両から最至近に位置する物体T11,T21に関する方位および相対速度の情報に基づいて物体との接近の蓋然性を判断し、車両制御装置50にこの蓋然性低減のための信号を供給する。
(もっと読む)
レーダ装置制御方法、レーダ装置、移動体および送受信装置
【課題】他の移動体の相対向きを算出することができるレーダ装置制御方法、レーダ装置、移動体および送受信装置を提供すること。
【解決手段】移動体の所定の位置に設置された複数の送受信部が、移動体番号と設置位置番号とを含む信号を送信し、他の移動体に設置された複数の送受信部から送信される信号を受信した場合に、信号を受信した受信部、信号を送信した他の移動体、信号を送信した送信部が設置されている位置を特定することにより、他の移動体の相対向きを算出する。
(もっと読む)
目標識別用レーダ装置
【課題】 観測された目標の識別を行う目標識別用レーダ装置において、クラッタ及び人工物の偏波特性を利用して、目標識別性能を向上する。
【解決手段】 広帯域パルスを発生して送信する送信機と、相互に偏波特性の異なる複数のアンテナを用いて複数の偏波信号を受信し、上記偏波信号の振幅と位相を示す散乱行列レンジプロフィールを出力する受信機と、上記散乱行列レンジプロフィールを用いて、目標の背景箇所の偏波特徴を算出する背景識別部と、上記偏波特徴に基づき最適なフィルタを選択する参照セル選択算定部と、上記フィルタによってクラッタを抑圧し、上記目標を検出する目標検出部と、検出された上記目標近傍の散乱行列レンジプロフィールを用いて複数の特徴量を算出する特徴量抽出部と、上記特徴量を用いて目標の識別を行う目標識別部とを備える。
(もっと読む)
レーダ装置とその受信ビーム形成方法
【課題】任意の設置場所にアクティブフェーズアレイアンテナを分割形成して大開口アンテナの特性を実現することで、レーダの高性能化を実現する。
【解決手段】レーダ制御装置21で発生される起動信号により、励振機22から励振信号が発生され、各アンテナサブモジュールL1〜Lnに分配供給されると、各アンテナサブモジュールL1〜Lnから合成受信信号が受信機23に送られる。この受信機23では、レーダ制御装置21からの指示に応じて、各サブモジュールL1〜Lnで得られた合成受信信号を取り込み、周波数変換器231で所定の周波数帯に変換し、分散開口合成回路232で分散開口合成アルゴリズムに従ってビーム合成を行う。このようにして、大開口のアクティブフェーズドアレイレーダと等価な高性能なレーダ装置が実現される。
(もっと読む)
レーダ装置
【課題】目標が複数存在し、目標の距離と角度のペアが不明な状況下でも、誤ったペアによる偽目標を排除し、正しいペアリング結果を出力可能なレーダ装置を得る。
【解決手段】距離・角度観測値を生成する距離・角度観測値検出部1と、複数の仮説を生成する仮設生成部4と、初期の距離・角度観測値を生成する初期状態量設定部5と、予測値と観測値との相関処理結果に基づいて、相関のとれた距離・角度観測値を選抜する相関処理部7と、観測値に基づいて予測値を算出する追尾フィルタ部8と、仮説の対数尤度を算出し、全サンプルの仮説の対数尤度の和およびサンプル数を算出する対数尤度算出部9と、サンプル数が所定の閾値以上である場合に仮説毎の対数尤度の和を出力するサンプル数判定部11と、信頼度が最大となる仮説に含まれる距離と角度のペアをペアリング結果として出力する最大信頼度仮説判定部12とを備える。
(もっと読む)
多目標追尾装置
【課題】追尾性能が高く、しかも操作性に優れた小型化可能な多目標追尾装置を提供する。
【解決手段】外部から入力される目標の観測値を用いて複数の目標を追尾する多目標追尾装置において、各目標の状態変数を表す値または相関ゲート内の観測値数の少なくとも1つに基づいて、目標毎に、複数種類の追尾フィルタのいずれを選択するかを判定し、該判定結果に応じた制御信号を生成する追尾フィルタ選択部5と、追尾フィルタ選択部で生成された制御信号によって示される追尾フィルタを実現するための処理を、目標毎に、実行する追尾フィルタ処理部1aおよび3aを備える。
(もっと読む)
測位システム及び処理装置
【課題】電波の見通し環境が得られない空間において、センサ、無線タグ、通信端末装置等が取り付けられていない移動物体の位置を測定する。
【解決手段】処理装置は、端末装置が取り付けられた第1の移動物体による受信波形の第1の解析結果と前記端末装置の位置とを対応付けてデータベース装置に記録し、端末装置等が取り付けられていない第2の移動物体による受信波形を得た場合は、該受信波形の第2の解析結果とデータベース装置に記録された第1の解析結果とを比較し、該当する結果を得た場合の端末装置の位置を第2の移動物体の位置として出力する。
(もっと読む)
レーダ装置
【課題】MUSIC法を用いた方位推定に際し、不等間隔アレーアンテナを採用することによって生じる非所望ピークの影響を抑え、高精度に物標方位を推定可能にすること。
【解決手段】レーダ装置は、受信信号に基づき自己相関行列を算出すると共に(S110)、当該行列の固有値を求め(S120)、閾値より大きい固有値の数から到来波数Mを推定する(S130)。また、各固有値に対応する固有ベクトルを用いて、MUSICスペクトルを算出し(S160)、MUSICスペクトルから、推定した到来波数Mより所定量α多い数のピークを抽出する。そして、各ピークに対応する方位を、検査対象方位に設定する(S170)。そして、検査対象方位のステアリングベクトル間の相関を、高低の二段階で判定し、相関が高い場合には、電力推定対象に設定する方位の数M’を、M+αに設定し、相関が低い場合には、数M’を、推定した到来波数Mに設定する。
(もっと読む)
先行車両の位置検出方法及び位置検出装置並びにデータフィルタリング方法
【課題】先行車両の位置データの算出精度を向上することができる位置検出方法及び位置検出装置を提供する。
【解決手段】自車両1に対する先行車両2の位置を検出する方法であって、車間距離情報riと横位置情報Li,Riからなる一次データセットを取得する工程と、一次データセットの車間距離情報riに対して線形回帰処理を行い、得られた線形回帰線との差が所定の閾値以下の車間距離情報riとこれに対応する横位置情報Li,Riとからなる二次データセットを取得する線形回帰処理工程と、この二次データセットの横位置情報Li,Riに対してクラスタリング処理を行い、最大のクラスタに含まれる横位置情報Li,Riとこれに対応する車間距離情報riとからなる三次データセットを取得するクラスタリング処理工程と、この三次データセットを用いて現在時刻t0における車間距離と横位置とを算出する位置情報算出工程とを備えた。
(もっと読む)
物標検出装置
【課題】アンテナ素子数を増加させることなく、静止した複数物標の検出性能を向上させる。
【解決手段】FMCW波の送受信動作を必要なスナップショットの必要数だけ繰り返すと共に、送受信動作毎に、FMCW波の中心周波数を変化させる(S110〜S130)。送受信動作(スナップショットSSi,i=1〜4)毎に、ビート信号データをFFT処理することで周波数スペクトラムを求め、その周波数スペクトラム上でピークとなる対象周波数kのデータx1(k)〜xN(k)を、全受信チャンネルCH1〜CHNから抽出し,配列した受信ベクトルXi(k)を生成し、受信ベクトルXi(k)のそれぞれについて相関行列Rxx_ssi(k)を求める。更に、相関行列Rxx_ssi(k)を、対象周波数k毎に平均(時間平均)した平均相関行列HRxx(k)を算出し、平均相関行列HRxx(k)から求めたMUSICスペクトラムにより、物標が存在する方位を求める(S140〜S180)。
(もっと読む)
レーダ装置
【課題】目標を検出しその位置情報を取得する際に、取得する目標位置情報の精度を向上させたレーダ装置を得る。
【解決手段】レーダ覆域を角度方向及び距離方向に所定の幅を単位としてメッシュ状のセルに分割し、各セル毎にレーダ反射波の受信レベルを取得してこれらを記憶しながら目標を検出する。そして、目標を検出した場合には、目標の位置情報としての角度情報を算出するにあたって、検出データに加え、角度方向に隣接しかつ目標が検出されなかったセルの受信レベルを微弱データとして抽出し、検出データとともに角度情報算出の演算に用いる。
(もっと読む)
信号処理装置
【課題】 レーダと、ESMによる目標探知・識別を同時に行なうシステムにおいて、レーダ送信中は、ESMによる受信が行なえないため、ESMにて受信したパルスに不可視領域が生じる。このような状況下でも、目標を正しく探知することを目的とする。
【解決手段】 信号同期手段13からレーダ送信時に発生するESMでの不可視領域の時刻を知らせる同期信号を作成し、ESM用A/D変換同期手段4にて、信号同期手段13からの同期信号に基づいてESMからの受信信号に不可視領域を示すフラグを付加する。ESM用信号処理判定手段5にて、ESM受信信号からパルス諸元を算出する際に、不可視領域を示すフラグに基づいてパルスが有効か否かを判定する。目標追尾識別手段12にて、有効と判定されたパルス情報に基づいて、目標識別や目標追尾を行なう。
(もっと読む)
レーダ装置
【課題】従来のビート周波数の対応付け方法では、目標の探知状況がアップチャープ時とダウンチャープ時で異なりビート周波数のピーク数が合わない場合においては、ビート周波数の対応付けが正確に行えない状況が発生する。
【解決手段】FMCW信号を送信する送信手段1と、受信信号と送信信号とからビート信号を生成する受信手段2と、ビート信号のビート周波数分布を求めるビート周波数生成手段3と、ビート周波数の追尾処理を行うアップチャープ用ビート周波数追尾手段4とダウンチャープ用ビート周波数追尾手段5と、ビート周波数時系列データから目標の距離及び距離変化率を算出するアップチャープ用目標検出手段6とダウンチャープ用目標検出手段7とを設けた。
(もっと読む)
レーダ断面積の測定装置及び方法並びにレーダ断面積の測定プログラム
【課題】近傍領域で測定した散乱電界の振幅情報のみから遠方領域のRCSを推定できるレーダ断面積の測定装置を得る。
【解決手段】水平方向において大きく、かつ垂直方向において水平方向に比べて小さい被測定物1を水平面で回転走査させる回転機構2と、被測定物1に電波を送信する送信アンテナ4と、被測定物1からの電波を受信する受信アンテナ5と、被測定物1から近傍領域内において被測定物1と送受信アンテナ4、5の間の距離が異なる3つの距離に送受信アンテナ4、5を水平方向に移動させる送受信アンテナ移動機構部7及び送受信アンテナ移動用レール8と、回転機構2、送受信アンテナ4、5、送受信アンテナ移動機構部7及び移動用レール8を駆動制御して遠方領域のRCSを求める制御ユニット100とを設け、制御ユニット100は、3つの異なる距離の近傍領域で測定した散乱電界の振幅情報のみから遠方領域のRCSを推定する手段を有する。
(もっと読む)
信号処理回路
【課題】不要波を送信する目標の距離を追跡する際、不要波の受信を高精度で検出でき、目標距離の追跡を行える信号処理回路を提供する。
【解決手段】反射波を含む電波を受信検波する送受信部と、レンジゲート、進みゲート、遅れゲート、2個の前段追加ゲート及び2個の後段追加ゲートを発生させるゲート発生部2と、これらのゲートを用いて抽出された受信信号を周波数解析して得たゲート情報に基づき目標距離の距離誤差を計算し、ゲート情報を記憶部に記憶する距離誤差計算部18と、前段追加ゲート及び後段追加ゲートの各信号レベルと閾値とを比較して不要波の受信を検出する不要波検出部17と、受信検出後不要波が消失するまでの時間を予測する時間予測部20とを備え、距離誤差計算部18は不要波の受信が検出される以前に計算したゲート情報を用いて距離誤差を計算する。
(もっと読む)
サブジェクトの位置を決定する方法およびシステム
本発明の一形態によれば、サブジェクトの位置決定方法が提供される。方法は、複数の受信機のうち第1のセットの受信機でサブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信し、無線周波数識別タグには無線周波数識別タグIDが割り当てられており、複数の受信機のうち第2のセットの受信機で無線周波数識別タグから第2の信号を受信し、第2の信号は第1の信号とは異なり、第2のセットの受信機は第1のセットの受信機とは異なっており、第1の信号についての情報および第2の信号についての情報に基づいて位置スコアを演算し、第1の信号についての情報には第1の信号であることおよび第1のセットの受信機であることが含まれ、第2の信号についての情報には第2の信号であることおよび第2のセットの受信機であることが含まれており、位置スコアに基づいてサブジェクトの位置を決定する。 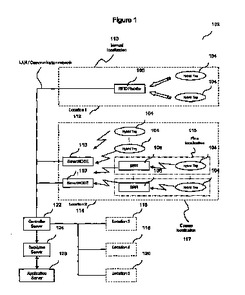 (もっと読む)
(もっと読む)
FMCWレーダ装置用信号処理装置、FMCWレーダ装置用信号処理方法、FMCWレーダ装置
【課題】受信波から干渉を検出するFMCWレーダ装置、FMCWレーダ信号解析方法を提供する。
【解決手段】FMCWレーダ装置における送信波と受信波とのビート信号の信号処理を行うFMCWレーダ装置用信号処理装置であって、1つのアップビート区間又は1つのダウンビート区間であるサンプリング期間内にサンプリングされたビート信号である長さMサンプルの第1データを、該サンプリング期間内にK個連続して取得する取得部と、取得部により取得された第1データの周波数領域への変換を行い、該変換の結果を第2データとする第1変換部と、第1変換部により変換されたK個の第2データの中に、異常な第2データである異常データが存在する否かの判定を行う判定部とを備えた。
(もっと読む)
画像レーダ装置
【課題】目標の相対運動と3次元形状を推定することのできる画像レーダ装置を得る。
【解決手段】目標に対して送信電波を照射するための送信機1及び送受信アンテナ3と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用補助アンテナ4,5および受信機6〜8と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部9と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段11とを備える。
(もっと読む)
物体識別装置及び物体識別方法
【課題】歩行者等の人物が計測対象物であっても確実に計測対象物を検出して識別することができる物体識別装置を提供する。
【解決手段】物体識別装置は、電磁波発生器101及び送信器102を用いて送信されて計測対象物OBによって反射した電磁波を受信器103によって受信すると、その受信信号の波形に基づいて、計測対象物OBに電磁波の吸収物が含まれている旨を吸収物検出部107によって検出し、吸収物検出部107によって検出された吸収物を含む計測対象物OBの種類を皮膚判別部108によって判別する。
(もっと読む)
221 - 240 / 535
[ Back to top ]