
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
141 - 160 / 535
目標検出装置
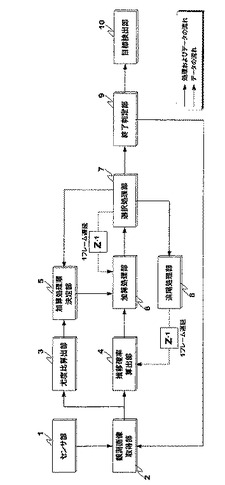
【課題】重複選択に起因する目標画素の広がりの発生を適切に抑制し低SNR環境下における目標検出精度を向上させる。
【解決手段】尤度比算出部3からの尤度比に基づき現フレームの観測画像の各画素に対する加算処理順を決定する加算処理順決定部5と、現フレームの観測画像の各画素に対し、加算処理部6からの加算処理結果に基づいた選択処理を行い、選択対象が他の現フレームの観測画像画素と競合し競合する画素と同じ対象を選択する重複選択が発生する場合は、重複選択を許容するか否かを判定して選択処理を行う選択処理部7とを有し、加算処理順決定部5は、尤度比が大きい画素に対する加算処理が優先的に行われるように加算処理順を決定し、選択処理部7は、対象画素の加算処理結果としてのトラックスコアが競合画素のトラックスコアの最小値よりも大きいか、または対象画素の推移確率が競合画素の推移確率の最小値よりも大きければ、重複選択を許容する。
(もっと読む)
同一領域上で取得されたSAR画像から得られるインターフェログラムのフィルタリング処理方法

【課題】合成開口レーダにより同一領域上に取得されたインターフェログラムについて、取得可能な全てのインターフェログラム及びその精度と関連してフィルターが施された位相値を考慮したベクトルを求めることができるフィルタリング処理方法を提供する。
【解決手段】合成開口レーダにより同一領域上に取得されたインターフェログラムに対するフィルタリング処理であって、a)共通格子上のデータの再サンプリングが可能となるような取得図形を有する同一領域上で、SARセンサにより一連のN個のレーダ画像(A1…AN)を取得し、b)共通格子上で再サンプリングした後、その共通格子から画素を選択し、c)取得可能な画像対のそれぞれに対して複素コヒーレンス値を推定するために、選択された画素のコヒーレンス行列を算出し、d)この時点では未知数であるソースベクトルθに関して、Rは複素数の実部を抽出する演算子、γnmはコヒーレンス行列の要素(n、m)の係数、kは正の実数、φnmはコヒーレンス行列の要素(n、m)の位相、θn及びθmは未知ベクトルθの要素n及びmである下記の式を最大化するステップを備えている。位相差のみが関数Tに与えられた場合には、未知ベクトルの値は、θ1=0とすることで決定できる付加定数より小さい値として推定され、このようにして得られた位相値θnは、フィルターの施された位相値のベクトルの構成要素となる。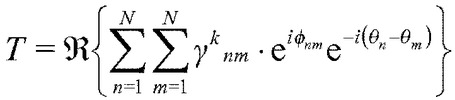 (もっと読む)
(もっと読む)
レーダ装置
【課題】陸や物標からのエコーを残し、雨雪反射のみを良好に抑圧することができるレーダ装置を提供する。
【解決手段】レーダ装置は、区間判定部11を備える。区間判定部11は、受信信号をサンプリングした受信データ系列の中から、所定の距離範囲内の受信データを抽出し、当該抽出された受信データに基づいて、当該距離範囲が「陸/物標区間」であるか「雨雪/ノイズ区間」であるかを判定する。このレーダ装置は、受信データに含まれる雨雪反射を、雨雪反射除去閾値に基づいて抑圧するように構成される。内部データ根拠閾値算出部14は、「雨雪/ノイズ区間」であると判定された距離範囲についてのみ、当該距離範囲内の受信データに基づいて、当該距離範囲に対する雨雪反射除去閾値としての内部データ根拠閾値を求める。
(もっと読む)
レーダ装置、信号処理装置
【課題】
指向角度を間引いてレーダ信号を送出しても物標の角度検出精度の低下を防止する。
【解決手段】
アンテナが第1の方向に回動するときには、前記アンテナにより間欠的な第1の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第1のビート信号群を生成し、前記第1の方向と反対の第2の方向に回動するときには、前記アンテナにより前記第1の指向角度群とは異なる間欠的な第2の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第2のビート信号群を生成する。そして、前記第1のビート信号群の第1のピークと、前記第2のビート信号群の第2のピークとを検出し、前記第1のピーク形状における極大値と前記第2のピーク形状における極大値とに基づき、物標の角度を検出するので、物標の角度検出精度の低下を防止することができる。
(もっと読む)
信号処理装置、この信号処理装置を備えるレーダ装置及びその信号処理装置の画素抜け検出方法
【課題】方位を異ならせて探知信号を送信するとともに、画素がマトリクス状に配列されて構成される画像に、エコー信号に基づく情報を描画して表示器に表示する信号処理装置において、様々な位置及び大きさで発生する画素抜けを確実に検出できる構成を提供する。
【解決手段】レーダ装置が備える画素抜け検出部は、今回描画するスイープラインである今回スイープラインの画素の位置と、前回処理したスイープラインである前回スイープラインの画素の位置と、に基づいて画素抜け検出を行う。より具体的には、前記画素抜け検出部は、今回スイープライン上の画素である注目画素と、この注目画素にX軸方向又はY軸方向で対応する前回スイープライン上の画素である対応画素と、に挟まれる1以上の中間画素が存在するときに、当該中間画素を画素抜け部分と判定する。
(もっと読む)
目標追尾装置
【課題】本発明は、正解航跡候補を含めた航跡候補をその状況に適切に生成保持することができ、探知状況によらず高い追尾精度を維持することができる目標追尾装置を提供する。
【解決手段】多次元相関行列生成部121は、センサ200の観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択する。多次元相関行列生成部121は、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する。多次元相関行列生成部121は、多次元相関行列の生成に際して、全航跡候補と相関する観測値が存在しない観測フレームである探知抜けフレームを多次元相関行列の観測フレームから除外し、探知抜けフレームよりも前の観測フレームを選択する。
(もっと読む)
目標追尾装置
【課題】必要最小限のネットワーク通信容量で、各センサにおける送信制御または各センサを管理する管理サーバによる送信要求制御を行うことを可能にし、ネットワーク通信容量の低減を図った目標追尾装置を提供する。
【解決手段】センサ側からセンサ観測情報を集約した再追尾センサ航跡をネットワークに流すことにより、センサ観測情報を全て出力する従来方式に比べネットワークに流すデータ量を低減させる。センサ側において、送信判定処理部1107により、自律的に自センサの再追尾センサ航跡が融合航跡の航跡精度に寄与するか否かによりネットワークに送信するか否かの送信判定を行い、寄与する場合のみ、再追尾センサ航跡を伝送することにより、必要最小限のネットワーク通信容量で、融合航跡の追尾精度を確保する。
(もっと読む)
道路曲率見積もりシステムおよび自動車目標状態見積もりシステム
【課題】道路の曲率を見積もる。
【解決手段】第一のカルマンフィルター(52)は、ヨーレートおよび速さの測定値をホスト車両内のそれぞれのセンサー(16、18)の測定値から見積もり、第二のカルマンフィルター(54)はそれらから道路曲率のクロソイドモデルのパラメータを見積もる。レーダーシステム(14)からのレンジ、レンジレートおよびアジマス角の測定値は、目標車両36の状態の非束縛の見積もりを提供するために拡張されたカルマンフィルター(56)によって処理される。関連する道路に束縛された目標の状態の見積もりは一または二以上の道路のレーンについて発生され、独立でまたは組み合わせで非束縛の見積もりと比較される。もし束縛された目標の状態の見積もりが非束縛の見積もりに対応しているなら、目標車両の状態は非束縛及び束縛の見積もりの統合で発生され、そうでないならば、非束縛の見積もりのみで与えられる。
(もっと読む)
センサ配置評価装置
【課題】少ない計算量で、監視対象領域を目標が移動する過程でセンサ群によって高確率で探知可能か否かを評価可能なセンサ配置評価装置を得る。
【解決手段】目標状態ツリーを保持する目標状態探索状況保持手段109と、目標状態選択手段110と、目標状態生成手段115と、見逃し確率算出手段107と、累積見逃し確率算出手段108と、終了判定手段121とを備えている。目標状態ツリーは、目標の位置または向きに関する情報を含む目標状態と、目標の累積見逃し確率との対をノードとするツリー構造からなり、ツリー構造のルートノードは、初期目標状態に対応する。目標状態選択手段110は、目標状態ツリーにおいて、累積見逃し確率があらかじめ定めた閾値以上であるノードから、1つの目標状態を選択する。目標状態生成手段115は、選択した目標状態に基づき、その一定時間後の目標状態を新たに生成する。
(もっと読む)
レーダー画像処理装置
【課題】レーダー画像の相関値を利用して変化検出を行なう場合、有意な地上変化以外の要因によって相関値が低下することを抑え、有意な地上変化による相関値低下との区別を可能にする。
【解決手段】相関値算出部12で算出した相関値を、観測幾何補正部16で観測条件の相違による影響を補正し、データベース部17において、上記補正を行なった相関値と地理情報等の環境情報とを関連付けたデータベースを作成する。変化検出を行う際には、観測領域相関値推定部23において上記変化検出処理範囲の環境情報を元にデータベース用いて相関値を推定し、これを用いて変化域判定部24において、変化検出処理範囲内における変化域を検出する。
(もっと読む)
レーダの軸ずれを判定する装置
【課題】車両に搭載され、前記車両の側方に向けて電磁波を放射すると共に、反射した該電磁波を受信して物体の距離および方位を検出するレーダを提供する。
【解決手段】車両の車速を検出し、該車速が所定値以上の時、少なくとも検出した距離に基づいて、多重反射が生じているかどうかを判定する。多重反射が生じていると判定されたならば、該多重反射の反射波について検出された方位と、所定の基準方位との差に基づいて、レーダの軸ずれを判定する。
(もっと読む)
レーダ装置
【課題】近距離から遠距離までの広範囲で複数目標が存在する場合であっても、高い検知性能で、高精度に目標を観測できるレーダ装置を提供する。
【解決手段】FMCW変調されたスイープ信号を少なくとも2回送信する送受信器20と、送受信器からの送信に応答して受信されたスイープ信号を高速フーリエ変換するFFT部32と、FFT部でフーリエ変換することにより得られた信号に基づき、送受信器による2回のスイープの各々に対応するビート周波数を算出し、算出したビート周波数差と時間差とから速度を算出し、算出した速度とビート周波数とから距離を算出することにより、複数の目標の距離と速度を算出するMRAV処理部35を備える。
(もっと読む)
物体検出装置
【課題】本発明は、時系列でのレーダの反射データが不安定な場合でも物体を高精度に検出することができる物体検出装置を提供することを課題とする。
【解決手段】レーダ検出手段10で検出された反射データをセグメントにグルーピングし、セグメント毎の反射データに基づいて物体を検出する物体検出装置1であって、所定の条件に基づいて反射データをセグメントにグルーピングするグルーピング手段22と、各反射データについて過去に属したセグメントの識別情報を特定するセグメント履歴特定手段23と、今回グルーピングされたセグメントに属する反射データの過去のセグメントの識別情報に基づいて、今回グルーピングされたセグメントと過去にグルーピングされたセグメントとの同一性を判別するセグメント識別手段23とを備えることを特徴とする。
(もっと読む)
受信波の相関行列算出装置及び受信波の相関行列算出方法、並びに波源方向推定装置及び波源位置推定装置
【課題】波源の帯域幅が狭い場合にも波源相互相関値を低減することができる受信波の相関行列算出装置を提供する。
【解決手段】受信波の相関行列算出装置は、アレーアンテナ24aにより電波を受信して相関行列を算出する。受信波の相関行列算出装置は、受信波の各周波数における方向行列を所定の周波数における方向行列へ変換し、所定の周波数における方向行列の位相を回転し、位相回転された方向行列を周波数平均して平均化された相関行列を算出する。
(もっと読む)
受信波の相関行列算出装置及び受信波の相関行列算出方法、並びに波源方向推定装置及び波源位置推定装置
【課題】波源の帯域幅が狭い場合にも波源相互相関値を低減することができる受信波の相関行列算出装置を提供する。
【解決手段】受信波の相関行列算出装置は、アレーアンテナ24aにより電波を受信して相関行列を算出する。受信波の相関行列算出装置は、受信波の方向行列の位相を回転し、位相回転された方向行列を含む相関行列を周波数平均して平均化された相関行列を算出する。
(もっと読む)
目標検出装置
【課題】レーダセンサを用いて受信信号から目標を検出する目標検出装置において、SN比が低い条件で目標を検出するため、動的計画法を用いて目標信号の積分路を探索する際の積分路の重複と、それによる誤警報発生の防止または抑制、及び動的計画法を用いて目標信号の積分路を探索する際の積分路探索処理の効率化を目的とする。
【解決手段】レーダセンサを用いて受信した信号に対する信号処理結果であるビデオ信号の各検出セルの状態推定を行うセル状態推定部を設け、セル状態推定部による状態推定結果および動的計画法における積分路探索時の評価値であるtrack scoreの分布状況に基づいて次スキャンにおける探索条件を設定する探索条件設定部を設ける。
(もっと読む)
レーダ装置
【課題】目標の検出性能および干渉抑圧性能を向上させたレーダ装置を提供する。
【解決手段】サブキャリア配置が既知のマルチキャリア送信波の受信した反射波から伝搬路特性を解析した結果又は所定のサブキャリア配置よりマルチキャリア送信波の観測帯域内のサブキャリア配置を設定する手段10,20,70〜90、設定されたサブキャリア配置に従ったサブキャリアを配置したマルチキャリア送信波形を生成し送信する手段70,80、送信した送信波の反射波の受信信号をサブキャリア帯域毎に分波しさらに前記設定に従いサブキャリアを配置した帯域の信号と無い帯域の信号とに弁別する手段20、サブキャリアのない帯域の信号に基づき干渉波検出を行う手段60、干渉波の検出結果に従いサブキャリアを配置した帯域の信号に干渉波抑圧を行う手段30、干渉波抑圧を行った信号から目標検出する手段50を有す。
(もっと読む)
レーダ装置
【課題】 正確に目標を類別できるレーダ装置を得る。
【解決手段】 マッチング処理部6において、受信信号に基づき作成したレンジプロファイルおよびドップラプロファイルと候補目標毎に予め保持する参照情報とを照合してレンジプロファイル相関値およびドップラプロファイル相関値を算出し、類別処理部3において、目標の位置情報や速度情報などを含む追尾情報に基づき各々重み付けされたレンジプロファイル相関値とドップラプロファイル相関値とを用いて目標を類別する。
(もっと読む)
障害物認識装置及び車両制御装置
【課題】車載カメラとミリ波レーダとのセンサ情報から取得するセンサ情報の組み合わせ精度を向上させて、より正確に障害物の認識をする障害物認識装置を提供する。
【解決手段】複数のセンサ情報を組み合わせて障害物の認識を行う障害物認識装置であって、障害物に関する第一パラメータ情報を取得する前方カメラ201と、障害物に関する第二パラメータ情報を取得するミリ波レーダ202と、前方カメラ201で取得した第一パラメータ情報とミリ波レーダ202で取得した第二パラメータ情報とに基づき、前方カメラ201又はミリ波レーダ202の方位角の軸ずれ量を算出し、算出された軸ずれ量に基づいて前方カメラ201又はミリ波レーダ202の軸ずれを補正する補正部203aと、軸ずれ量を記憶する記憶部203cとを備える。
(もっと読む)
気象レーダーを用いた突風探知システム
【課題】 小型で、空間分解能が高く、高速走査によって地表面付近に発生する突風をピンポイントで探知することができる地上交通機関安全運行のための気象レーダーを用いた突風探知システムを提供する。
【解決手段】 気象レーダーを用いた地上交通機関用突風探知システムにおいて、1つの低い仰角のみでレーダーアンテナを短い時間間隔で走査し、地面付近領域をレーダーで監視し、高い空間分解能を有する小型ドップラー気象レーダー4により、地上交通機関の安全運行のための突風の探知を行う。
(もっと読む)
141 - 160 / 535
[ Back to top ]