
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
181 - 200 / 535
モノパルスシステムにおける互いに間隔が接近した複数の標的の検出および分解
【課題】間隔が接近した二標的を表す第一と第二の方位角値を決定する方法を提供すること。
【解決手段】この方法は、モノパルスシステムにおいて間隔が接近した二標的を含むモノパルス走査を行い、モノパルスレーダー走査データを生成することと、モノパルス走査データを処理し、直交角データと結合方位角データと直交角の最大絶対値とを提供することと、直交角の最大絶対値を閾値と比較することと、直交角の最大絶対値が閾値を超える場合、モノパルス走査内の角領域にわたる直交角データの積分から第一と第二の方位角値を導くことと、直交角の最大絶対値が閾値を超えない場合、結合方位角データをモノパルスレーダーのボアサイト角の関数として多項式にフィッティングし、第一と第二の方位角値を導くことと、第一と第二の方位角値を関連したディスプレイでユーザーに表示することとを含む。
(もっと読む)
降水分布の推定システムおよび降水分布の推定方法

【課題】降水分布を精度良く推定する構成とした降水分布の推定システムおよび降水分布の推定方法の提供。
【解決手段】降水分布の推定システム1は、MPレーダ雨量測定手段2、
MPレーダ雨量を在来型雨量格子1kmに変換する変換手段3、空間ローパスフィルタ4、補正係数付与手段(回帰分析・品質管理)5を有する。また、在来型レーダ雨量測定手段6、空間ローパスフィルタ7を有し、フィルタ処理後のデータは補正係数付与手段5に送信される。MPレーダ雨量と在来型レーダ雨量は、ダイナミック補正手段8で補正され、MP−在来型合成雨量作成手段9でMP−在来型合成雨量(MP−JMA合成雨量)を作
成する。
(もっと読む)
FMCWレーダ位置決め装置の拡散損失源による感度損失を検出する方法
本発明は、
FMCWレーダ位置決め装置の、拡散損失源(30)による感度損失を検出する方法であって、送信信号がレーダ位置決め装置により発せられ、送信信号の周波数は、連続する変調ランプにおいて周期的に変調され、レーダ位置決め装置により受信される信号の少なくとも1つの周波数部分の少なくとも1つの性能特性が評価される、上記方法において、送信信号の電力が周期的に、変調ランプの終了後ごとに変更され、感度損失が、同じ変調の連続する変調ランプにおいて受信される信号の性能特性の違いを用いて決定される方法に関する。
(もっと読む)
画像変化抽出装置
【課題】地表面に生じた物理的な変化をより高精度に抽出し、変化の空間的連続性を正しく表示する画像変化抽出装置を提供する。
【解決手段】コヒーレンスマップを対象に、ノイズ除去を行うノイズ除去部2と、ノイズ除去後の画像から特徴量抽出を行う特徴量抽出部6と、コヒーレンスマップを構成する画素のコヒーレンスの時間的、空間的平均値を算出するコヒーレンス平均算出部3と、コヒーレンスマップの時系列変化情報を用いて、変化抽出を行う変化抽出部4と、変化の発生時刻のずれを検出し、時刻調整を行う変化時刻調整部5と、変化選別を行い変化選別後の変化選別画像データを全体の出力とする変化選別部7とを備える。
(もっと読む)
車両のレーダー装置の制御方法および制御装置
本発明は、車両(F1)のレーダー装置(1)の制御方法に関するものであり、送/受信ユニット(1.1)によってレーダー信号(RS)が送信および/または受信され、車両(F1)と該車両の前方に存在する対象物との間隔(DIST)が検出され、検出された間隔(DIST)に依存して、および/または無線データ伝送システムの信号(S)が検出される際に送/受信ユニット(1.1)の送信出力(P)が調整される。ここでは、最小降雨レート(RLOW)を上回るときに送/受信ユニット(1.1)の送信出力(P)が低減される。本発明はさらに、車両(F1)のレーダー装置(1)の制御装置に関する。 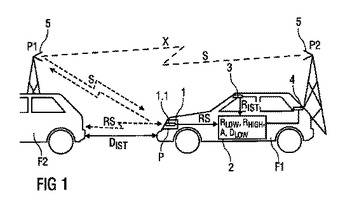 (もっと読む)
(もっと読む)
レーダ装置
【課題】ドップラー周波数の変化を考慮してドップラー補正を行い、超分解能測距精度の改善を図る。
【解決手段】送信周波数をステップ状に変化させた電波を生成して送信するとともに、当該電波が目標(4)で反射した反射波を受信する送受信手段(1,2,3,5,6)と、送受信手段による受信信号に基づいて、目標(4)の検出情報を目標信号として出力する目標検出処理手段(7,8,9)と、目標検出処理手段からの目標信号が入力されて、送信周波数の違いによるドップラー周波数の変化に基づいて、目標信号の位相を補正したドップラー補正信号を出力するドップラー補正処理手段(10)と、ドップラー補正処理手段からのドップラー補正信号に基づいて、目標(4)までの距離を超分解能測距する超分解能処理手段(11)とを備えている。
(もっと読む)
レーダ装置
【課題】距離アンビギュィティを解消し高距離分解能化する測距性能を向上できるレーダ装置を得る。
【解決手段】FMレンジング後の距離分解能と、PRI内の距離分解能が高精度になるようなパラメータに基づき複数のPRIに渡って周波数変調されたキャリア信号に対してPRIでパルス変調された送信信号を放射する送信機3と、目標で反射して戻った受信信号に対して、キャリア信号を用いてダウンコンバートし受信ビート信号に変換する受信機8と、受信ビート信号に対しFMレンジングを行い、PRI内の距離−FMレンジング後の距離マップを作成する距離マップ作成手段201と、PRI内の距離−FMレンジング後の距離マップに対し、信号の強度に基づき目標候補を検出する目標候補検出手段220と、目標候補のFMレンジング後の距離を用いて目標との相対距離を算出する目標相対距離算出手段221とを設けた。
(もっと読む)
姿勢計算装置及び誘導装置及び姿勢計算装置の姿勢計算方法及び姿勢計算装置の姿勢計算プログラム
【課題】目標物周辺の地面の傾斜を正確に検出することができ、斜面に設定された目標物に対して予め想定された姿勢角で正確に到達することのできるように計算する姿勢計算装置を提供する。
【解決手段】目標座標取得部121が目標の2次元の位置座標である目標座標20を取得し、DEMデータベース122が所定の領域内における複数の点の標高情報を含む3次元位置座標を記憶し、傾斜算出部123がDEMデータベース122に記憶された3次元位置座標の中から、目標座標取得部121により取得された目標座標近傍の複数の3次元位置座標を目標周辺DEMデータ21として取得し、傾斜算出部123が複数の目標周辺DEMデータ21に基づいて、目標の周囲の領域の傾斜角22を処理装置により算出し、姿勢角計算部124が傾斜算出部123により算出された傾斜角22に基づいて、飛翔体の目標に対する姿勢を制御するための飛翔体の姿勢角23を計算する。
(もっと読む)
ネットワークレーダシステム
【課題】 より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ること。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
(もっと読む)
分散アンテナレーダーにより放射される周波数と砲口照準合わせを管理する方法
【課題】実行される砲口照準合わせのスケジューリングを最適な手法で管理することを可能にする方法を提供する。
【解決手段】候補砲口照準合わせはレーダーにより考慮される砲口照準合わせ要求に対応する。各砲口照準合わせは、各組が特に候補砲口照準合わせ毎に定義される認可周波数の組の中から選択される一組の候補周波数である。候補周波数はレーダーにより放射される周波数のダイバーシティを保証する。砲口照準合わせはアンテナの回転速度の変動を動的な手法による。他の方法は表から選択された砲口照準合わせに対して関連する候補周波数の1つを選択する。この選択された(砲口照準合わせと周波数の)対は、対応する波形の放射を担う手段に送信される。具体的には分散スロットアンテナを有する監視レーダーによる砲口照準合わせの管理に適用する。
(もっと読む)
目標追尾装置
【課題】多次元相関決定時の演算負荷の減少を実現しかつ許容可能な解を導出する目標追尾装置を得る。
【解決手段】センサ観測値を入力情報とする航跡候補コスト行列生成手段110Aと、航跡分離状況判定手段130と、多次元相関決定手段120とを備えている。航跡候補コスト行列生成手段110Aは、航跡候補行列と、航跡候補の各々に対応するコストからなるコスト配列とを生成する。航跡分離状況判定手段130は、航跡が分離していると判定された場合には、航跡候補コスト行列生成手段110Aに対し、航跡候補行列と航跡候補の各々とに対応するコストからなるコスト配列を再生成するように指示する。多次元相関決定手段120は、航跡候補行列とコスト配列とからLagrange緩和法を用いて、N+1次元割当問題を2次元割当問題の繰り返しとして解くことにより、最適航跡組み合わせを抽出する。
(もっと読む)
気象予測装置、気象予測方法および気象予測プログラム
【課題】2次元の気象画像を用いて気象予測を行うとともに、気象状態を推定する。
【解決手段】気象予測装置であって、時系列に連続した複数の2次元の気象画像を入力する入力手段と、気象画像の画像濃淡値のもとづいて雨雲または雷雲のパターンが存在する2次元のパターン領域を検出する画像特徴量解析手段と、パターン領域の3次元モデルを生成する3次元モデル化手段と、連続する気象画像から前記パターン領域の動きベクトルを算出し、当該動きベクトルに基づいて前記パターン領域を変化させて予測される気象画像を生成する予測手段と、3次元モデルの高さの変化に基づいてパターン領域の気象状態が発達、衰退、停滞のいずれであるかを推定する状態推定手段と、を有する。
(もっと読む)
物体検知システム、物体検知方法、タグ通信装置
【課題】不特定多数の人や物等の物体にRFIDタグを持たせることなく、安価にその物体の位置を確実に検出できるようにした物体検知システム、物体検知方法、タグ通信装置を提供する。
【解決手段】タグ通信装置1Aを用いて物体Dの位置を検出する場合は、タグ通信装置1Aの交信可能エリアAにRFIDタグ2を複数設置し、各RFIDタグ2のIDとその位置情報とを対応付けてテーブルに記憶する。そして、タグ通信装置1Aから各RFIDタグ2に対して交信を試みた結果より、交信不可のRFIDタグを検出し、検出したRFIDタグのIDに対応する位置情報を前記テーブルから取得する。
(もっと読む)
自動車において観測対象物体を検出する方法
【課題】 観測対象物体とノイズ、固定観測対象物体と移動観測対象物体、および互いに近接し合った観測対象物体同士を容易に区別することができる、自動車における観測対象物体を検出する方法を提供する。
【解決手段】 この方法は、与えられたサイクル数にわたって、自動車の移動量に基づいて、自動車と相対的な、少なくとも1つの観測対象点の位置を補正するステップと、少なくとも1つの観測対象点から開始して、第1の与えられた特性を満たす、隣接する観測対象点とともに一次グループを形成するステップと、第2の与えられた特性に基づいて、一次グループが同質的であるか否かを検証するステップと、与えられたサイクル数にわたって、自動車と相対的に、単一の観測対象物体に対応して構成されていると判断されるグループの位置を計算するステップとを含んでいる。
(もっと読む)
位置推定装置及び位置推定方法
【課題】移動物体の位置推定精度の向上を図る位置推定装置及び位置推定方法を提供する。
【解決手段】運動パラメータ選択部202が移動物体のID情報に対応する移動物体の属性情報と、位置情報に対応するフロアの属性情報とをデータベース部112から取得し、取得した属性情報に基づいて、最適な運動パラメータを選択する。分布更新部203は、分布パラメータ保持部204に保持された一つ前の時刻における移動物体の位置の分布パラメータ、位置情報、選択された運動パラメータを用いて、現在の時刻における移動物体の位置の分布パラメータを算出し、最尤位置算出部205は、算出された移動物体の位置の分布パラメータから移動物体の位置として最も確率が高い位置を算出する。
(もっと読む)
電波測角アンテナ、これを備えた電波測角装置、及び飛しょう体
【課題】従来のレドーム内に設置される電波測角アンテナでは、レドームの影響を受けるため正確な入射角が計測できないという問題がある。
【解決手段】そのために、本発明の電波測角アンテナは、同一の面に配設された複数の計測アンテナと、前記計測アンテナに対して交差する方向に配設された複数の補助アンテナとを備えたことを特徴とする。これにより、補助アンテナにより入射方向を算出し、その情報を用いて、計測アンテナの誤測角を低減するものである。
(もっと読む)
物体検知装置
【課題】 FM・CW型の物体検知装置でターゲットを一旦ミスペアリングした場合に、正しいペアリングのデータを遅滞なく出力して制御の応答性を高める。
【解決手段】 今回ペアリング候補選定手段S9は、今回相対関係および前回相対関係が同一の物体に基づくものか否かを判定し、同一の物体に基づくものと判定された場合に、今回相対関係の算出および前回相対関係の算出に用いられたペアリング候補を正しいペアリング組み合わせとして確定する。ペアリングフィードバック処理手段S10は、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、組み合わせが確定していないペアリング候補に基づいて前回相対関係を更新する。このように、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、前回相対関係に遡って今回相対関係の正誤を検証するので、正しい今回相対関係を速やかに確定させて制御の応答性を高めることができる。
(もっと読む)
電波源識別装置
【課題】振幅対位相特性を過不足なく抽出して電波源の識別をする。
【解決手段】信号検出部12は未知電波源からの受信信号BSの信号諸元を検出し、記録保存装置16は受信機雑音の分散σn2及び既知の送信装置名と関連付けられた複数の振幅対位相特性APCrefを記録する。平均電力出力部13aは移動窓を用いて受信信号BSを部分的に抽出し、部分信号の平均電力PSを算出する。検定部13bは平均電力PSが受信機雑音の分布と合致するか否かの棄却検定を行い、受信信号の立ち上がり始点kus及び立下り終点kdeを抽出し、端点抽出部13cは受信信号の立ち上がり及び立下りの区間Γu,Γdを決定する。波形抽出部13dは区間Γu及びΓdに対応する振幅変化部分AF及び位相変化部分θFを抽出し、特徴量抽出部14は線形変換により振幅対位相特性APCを抽出し、照合部15は振幅対位相特性APC,APCrefを照合する。
(もっと読む)
信号処理装置
【課題】センサでの観測データにより未知パラメータを推定する方法に用いる信号数の推定には、従来、経験則による閾値を用いるため、高精度な未知パラメータの推定ができない。
【解決手段】キュムラント行列演算手段で求めた、センサでの観測データの高次統計量に基づくキュムラント行列から、固有値固有ベクトル演算手段が固有値と固有値に対応する固有ベクトルに分解し、符号判定手段が分解された固有値の符号が反転するときまでの固有値数を検出して信号数を推定し、パラメータ推定手段で、符号が反転するときまでの固有値に対応する固有ベクトルを用いて、未知パラメータを推定する。
(もっと読む)
車載レーダ装置
【課題】外来ノイズによる影響が変化する環境下においてもレーダ性能を低下させることなく外来ノイズを低減して誤動作を抑制し、十分な測距精度を確保する。
【解決手段】演算装置6の信号処理部6aで送信パルスと時間相関を持つフレームデータに対して車速信号に従ったノイズ低減の積算平均処理を実施して測距信号のノイズを低減し、測距部6bで測距信号に基づいて障害物10までの距離を演算する。積算平均処理の反復回数は、送信パルス発生周期と反復回数の乗算値が距離分解能と車速とに基づく条件を満足するようブロック周期制御部6cによって制限され、外来ノイズの多い環境下においても、レーダ性能を低下させることなくノイズを低減する。
(もっと読む)
181 - 200 / 535
[ Back to top ]