
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
201 - 220 / 535
車載レーダ装置
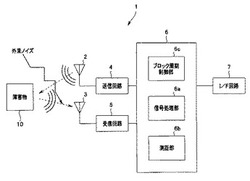
【課題】外来ノイズによる影響が変化する環境下においてもレーダ性能を低下させることなく外来ノイズを低減して誤動作を抑制し、十分な測距精度を確保する。
【解決手段】演算装置6の信号処理部6aで送信パルスと時間相関を持つフレームデータに対して車速信号に従ったノイズ低減の積算平均処理を実施して測距信号のノイズを低減し、測距部6bで測距信号に基づいて障害物10までの距離を演算する。積算平均処理の反復回数は、送信パルス発生周期と反復回数の乗算値が距離分解能と車速とに基づく条件を満足するようブロック周期制御部6cによって制限され、外来ノイズの多い環境下においても、レーダ性能を低下させることなくノイズを低減する。
(もっと読む)
車両周辺監視装置

【課題】レーダからの反射波を受信して物標を検出する場合に、物標の検出精度を向上させる。
【解決手段】車両周辺監視装置1のECU30に、レーダ10が取得した他車両からの反射波の反射ピークに基づいて物標を検出するとともに、所定のグルーピング条件を満たす複数の物標をグルーピングし、この物標が所定の確定条件を満たす場合に、この物標の検出を確定して追跡するトラッキング部31と、物標が確定条件を満たさない場合に、前回の予測値に基づいて物標の補間処理を行う補間処理部32と、警報を発生させる警報処理部33とを備える。そして、補間処理部32は、物標が確定条件を満たさない回数が所定回数を超えると、物標の予測周波数範囲f’における反射ピークの数が所定の閾値以上であって、予測周波数範囲f’における反射ピークのパワー平均値が所定の閾値以上であった場合に限り、補間処理を延長する。
(もっと読む)
レーダ装置
【課題】複数のパルスを送受信して、検出された信号の偏波特性の時間変化を観測し、その変化量に基づいてマルチパス波と直接波を判定する。
【解決手段】互いに直交する偏波特性を有する二つのアンテナ10、11と、二つのアンテナのうち、送信においてはいずれか一方を駆動させ、受信においては双方を駆動させて、観測対象の散乱ベクトルを収集する偏波切替器9と、複数のパルスの送受信によって得られた受信信号を一時的に蓄積するメモリ13と、メモリから読み出した受信信号に対して目標検出処理を適用して目標信号を検出する目標検出部14と、検出された目標信号の偏波度を算出する偏波度算出部15と、算出された偏波度の値を用いて検出された目標信号がマルチパス波によるものか直接波によるものかを判定する偏波度利用マルチパス判定部16とを備える。
(もっと読む)
画像レーダ装置
【課題】PRFの倍増を防ぎ、クロストラック方向の観測幅の減少を防ぐことのできる画像レーダ装置を得る。
【解決手段】送信方向を制御可能な互いに異なる第1および第2の偏波面を有する2つの送受信用のアンテナサブアレイ8a、9aと、送受信アンテナサブアレイに給電する送信手段1、3a、3bと、送受信アンテナサブアレイについて2本以上の受信ビームを形成しながら、送受信アンテナサブアレイで同時に受信する受信手段2、3a、3b、6a、7aと、受信手段で得られた受信信号に対してそれぞれ合成開口レーダ画像を再生する合成開口レーダ画像再生手段11a、11bとを備えている。送信手段は、送信開始から所定時間にわたって連続的に第1の偏波によるパルスを繰り返し送信し、所定時間を越えた後は、連続的に第2の偏波によるパルスを繰り返し送信し、受信手段は、常に第1および第2の両方の偏波でパルス信号を受信する。
(もっと読む)
人体検知装置及びそれを備えた小便器
【課題】少ない演算量で人の行動状態を的確に把握することができる人体検知装置を提供する。
【解決手段】上述した課題を解決するために、本発明は、検知対象物によって反射された伝播波のドップラ信号を利用した人体検知装置(4)であって、検知対象物に向けて伝播波を放射する伝播波発信部(10)と、検知対象物によって反射された伝播波を受信する伝播波受信部(12)と、放射された伝播波及び受信された伝播波に基づいてドップラ信号を生成するドップラ信号生成部(14)と、このドップラ信号生成部により生成されたドップラ信号を自己回帰モデルを使用して解析し、ドップラ信号のピーク周波数及び振幅を算出するドップラ信号解析部(16)と、このドップラ信号解析部によって算出されたピーク周波数及び振幅に基づいて人の行動状態を判定する行動状態判定部(18)と、を有することを特徴としている。
(もっと読む)
レーダ装置
【課題】マルチパス等による影響が絶えず変化する中においても、目標の高度情報を安定して取得することができるレーダ装置を得る。
【解決手段】仰角方向に対して測角ビームとしての複数の受信ビームを同時に形成し、これら受信ビームのそれぞれで取得した目標に対する測角データの中から有効測角範囲のデータを用いて目標の高度情報を算出するとともに、二次レーダからの同一目標に対する高度情報を受けとってこの算出結果と比較する。そして、両者の差の標準偏差があらかじめ設定された所定のしきい値を越えた場合には、複数の受信ビームの指向方向を変化させるように制御する。
(もっと読む)
画像レーダ装置
【課題】1偏波送信・2偏波受信の信号から2偏波送信・2偏波受信の信号を推定する際の適切な反復処理を可能にした画像レーダ装置を提供する。
【解決手段】受信した1偏波送信・2偏波受信の信号の反復処理により2偏波送信・2偏波受信で得られる信号の共分散行列を推定する成立性・収束判定型偏波特性2次統計量推定手段が、1偏波送信・2偏波受信の信号の反復処理により非線形の方程式を解き共分散行列を推定する手段10,11,12,13,13a、反復処理される共分散行列の推定値から2偏波送信・2偏波受信の信号の共分散行列推定不可能領域を判定する手段16、共分散行列推定可能領域で共分散行列の連続する2回の反復推定結果を比較する共分散行列の同一性を検定する手段17、前記比較結果を受けて、反復処理される共分散行列推定値が収束していることに基づき反復処理の終了を判定する手段18を含む。
(もっと読む)
レーダ装置
【課題】物標情報を高精度に求めることが可能なレーダ装置を提供すること。
【解決手段】本発明が適用されたレーダ装置は、FMCW方式のレーダ装置であり、変調周期毎に、受信結果を表すビート信号からスナップショットデータを生成する。また、各変調周期のスナップショットデータから生成した変調周期毎の自己相関行列を、複数周期分平均化し、その平均化後の自己相関行列に基づき、MUSIC法により物標方位を求める。但し、平均化は、各変調周期のスナップショットデータに含まれる雑音成分の量(干渉量)に基づき、加重平均により行う。即ち、各変調周期の自己相関行列に作用させる重み付け係数を、その変調周期の干渉量に応じた値に設定する(S570)。干渉量が小さい場合には重み付け係数を大きく、干渉量が大きい場合には、干渉量を小さくといった具合である。
(もっと読む)
レーダ装置
【課題】物標に関する情報の算出を精度良く行う。
【解決手段】レーダ装置は、送受信手段と、物標検出手段とを備える。送受信手段は、レーダ波を送信するとともに、物標により反射されたレーダ波を逐次受信する。物標検出手段は、送受信手段が受信した受信信号のスペクトルにおけるピークに基づいて物標を検出し、当該ピークから物標を検出できない場合に物標を外挿状態と判断する。また、物標検出手段は、スペクトルにおけるピークの状態に基づいて外挿状態の種類を決定する。
(もっと読む)
レーダ装置、及びターゲットの速度進行方向推定方法
【課題】特に、ターゲットの速度が遅いときに、精度の高いターゲットの速度、及び進行方向を推定できるレーダ装置を提供する。
【解決手段】ターゲットの速度、及び進行方向を推定して衝突予測を行うレーダ装置であって、所定の時間一定の周期でターゲットを捕捉するターゲット捕捉部と、ターゲット捕捉部が捕捉した捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する衝突予測部と、衝突予測部の推定したターゲットの速度が所定速度以下である場合、推定したターゲットの速度に応じてターゲットを捕捉する時間を増加させて捕捉点の数を増加させるターゲット捕捉制御部とを備え、衝突予測部は、前記ターゲット捕捉制御部が捕捉点の数を増加させた後の全ての捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する。
(もっと読む)
測距システム
【課題】極至近距離の測距を可能にする新規な測距手法を提供する。
【解決手段】判定部3は、パルスレーダ1によって生成された受信波形を時間軸上において複数の区間に分割し、分割された区間のそれぞれにおける受信波形の積分値の大小関係に基づいて、受信波形の位相パターンを判定する。測距部4は、ターゲットの既知の距離において出現する位相パターンを特定するとともに、この位相パターンの繰り返しに基づいて、既知の距離からの変化量を算出し、これによって、ターゲットの現在の距離を算出する。
(もっと読む)
高分解能信号処理装置および高分解能信号処理方法
【課題】高分解能処理に要する演算負荷を削減し、演算器およびメモリのリソースを有効に活用する。
【解決手段】受信信号をフーリエ変換し周波数次元で所望の信号成分を検出し、信号成分を用いて共分散行列を生成する共分散行列生成部20と、共分散行列から所望信号の到来角度を算出する高分解能測角処理部23とを備え、所定時刻後における到来角度を予測する角度予測部24と、所定時刻後の共分散行列を予測する共分散行列予測部26と、生成された共分散行列と予測された共分散行列との一致判定を行う共分散行列一致判定部21と、2つの共分散行列が一致すると判定された場合には、高分解能処理を行わずに角度予測部で予測された到来角度を出力し、2つの共分散行列が不一致と判定された場合には、高分解能測角処理部に高分解能処理を行わせることで到来角度を算出させて出力する処理選択部22とをさらに備える。
(もっと読む)
レーダ装置
【課題】クラッタのドップラー周波数折り返し発生時にこれを補正したクラッタ中心周波数推定処理を行うことでクラッタの消え残りを防止するレーダ装置を得る。
【解決手段】パルスレーダの受信信号からクラッタの数と中心周波数を推定するための信号を抽出するクラッタ推定用データ抽出手段1、抽出された信号から受信されたクラッタの数を推定するクラッタ数判定手段2、クラッタ数判定結果から実施するクラッタ抑圧処理の内容を切り替える切替器3、抽出された信号とクラッタ数判定結果を用いて、クラッタの周波数折り返しが発生する場合に生じる推定誤差を回避してクラッタ中心周波数推定を行う折り返し補正付クラッタ中心周波数推定手段4、切替器によりクラッタの数に従って処理内容が決定され、折り返し補正付クラッタ中心周波数推定手段から転送されるクラッタ中心周波数推定値を入力して、受信信号中のクラッタを抑圧するクラッタ抑圧処理部5を備える。
(もっと読む)
物体検出装置
【課題】処理負荷を抑えながら、高精度に線模様を検出する物体検出装置を提供する。
【解決手段】処理部12は、処理部22で白線を検出した場合に、当該白線の画像特徴量(彩度、色相)を算出する。さらに、処理部12は、画像全体において、算出した白線の画像特徴量に一致する画像特徴量を有する位置を検出する。そして、レーザレーダ装置2の処理部22で検出した白線の位置における画像とカメラで抽出した遠方の白線の画像とを合成する。
(もっと読む)
物体検出装置
【課題】処理負荷を抑えながら、高精度に線模様を検出する物体検出装置を提供する。
【解決手段】処理部22で車両判定を行った場合に、当該車両の周囲において、カメラ1の処理部12で白線認識を行い、認識した白線の画像特徴量(彩度、色相)を抽出する。さらに、処理部12は、画像全体において、車両周囲で抽出した白線の画像特徴量に一致する画像特徴量を有する位置を検出することにより、画像内のどの位置に白線が有るかを検出する。
(もっと読む)
レーダ装置
【課題】振幅及び位相情報を持つ連続するレンジビンの信号を加算し、目標の検出性能を改善できるレーダ装置を得る。
【解決手段】受信信号の周波数変換とI、Q位相検波を行い、I、Q成分の複素ビデオ信号を生成し、距離分解能で高距離分解能化を図った高距離分解能信号を出力する受信部4と、高距離分解能信号に対して、連続するレンジビンの信号に重み付けする為の荷重値を算出する荷重計算部6と、荷重値を用いて連続するレンジビンの信号に重み付けをする重み付け部7と、連続するレンジビンの信号を加算するレンジビン間積分部8と、目標寸法データと距離分解能の比からレンジビン数を設定し、レンジビン数だけ連続するレンジビンを距離方向へ移動するように各6、7及び8を制御する計算制御部5と、レンジビン間積分部8から出力される信号の検波を行う検波部9と、検波部9から出力される信号を用いて目標を検出する目標検出部10とを設けた。
(もっと読む)
モノパルスレーダ装置
【課題】マルチパス干渉状態で適切な信号処理を実行できるように、マルチパス干渉が起こっているか否かを精度良く判定することが可能なモノパルスレーダ装置を提供する。
【解決手段】モノパルスレーダ装置101は、送信部104から電波を放射し、その反射波を複数の受信部105(a)、105(b)で受信して、自車両201の前方に存在するターゲット車両301〜306を検知するものであって、予め設定された時間間隔を空けて検知した複数回の検知結果に基づいて、マルチパス干渉が起きているか否かを判定するマルチパス干渉判定手段を備える。かかる構成により、1回の信号強度比較結果に基づいてマルチパス干渉が起こっているか否かを判定する場合と比較して、精度良く判定することができ、マルチパス干渉が起こっている場合に、干渉時の特性に応じた信号処理を用いて、より適切な処置を行うことができる。
(もっと読む)
複合センサ装置
【課題】被探知性を低下させつつ追尾性能を向上させた、小型かつ低消費電力の複合センサ装置を得る。
【解決手段】パッシブセンサ及びアクティブセンサによる目標の観測値を融合し、これを等速直線運動等の所定の運動モデルに基づき構成された追尾フィルタによりフィルタリング処理を行って、その処理結果と観測値との残差、すなわち、所定の運動モデルと異なる目標の運動を、目標のマニューバとして検出し、マニューバ段階値として定量化する。そして、このマニューバ段階値が変化した場合、及びフィルタリング処理による目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を越えた場合の少なくとも1つの場合に、継続して観測を行っているパッシブセンサに加え、アクティブセンサによる観測を行うように観測スケジューリングを制御する。
(もっと読む)
追尾装置
【課題】角度バイアス及び距離バイアス推定精度の高精度化と、バイアス推定の演算時間の高速化を図ることができる追尾装置を得る。
【解決手段】センサ群10、観測値が同一目標から得られた観測値であるかを判定し、同一目標からの観測値の集合を蓄積する観測値データベース30、データベースから同一目標からの観測値を抽出する観測値出力制御処理部40、推定すべき全バイアス成分を、複数組割り当てるバイアス成分組割当処理部50、割り当てられたバイアス成分組毎に設けられた、バイアス成分組初期値設定処理部、バイアス成分組推定処理部及びバイアス成分組収束判定部、バイアス成分組毎のバイアスベクトル推定値とその誤差共分散行列を時系列に蓄積するバイアスデータベース90を備える。
(もっと読む)
人分布計測システム及び人分布計測方法
【課題】平面上の人の分布を計測可能な人分布計測システムを提供する。
【解決手段】それぞれ識別可能な電波を送受信する複数の送受信機5A-5L、送受信機5A-5Lの複数の対のそれぞれについて、受信電波の変動をモニタする変動モニタ301、送受信機5A-5Lの複数の対のそれぞれについて、人の存在が電波に与える影響度の平面分布を保存する影響度記憶部402、送受信機5A-5Lの複数の対のそれぞれについて、影響度に電波変動の大きさを乗じて算出される、人の存在可能性の平面分布を算出する存在可能性算出モジュール302、及び送受信機5A-5Lの複数の対のそれぞれについて算出された存在可能性の分布を足し合わせる足し合わせモジュール303を備える。
(もっと読む)
201 - 220 / 535
[ Back to top ]