
Fターム[5J070AK14]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833) | 特定物標の識別 (195)
Fターム[5J070AK14]に分類される特許
81 - 100 / 195
レーダー装置
【課題】後段に接続されるシステムにとって不要な対象物と必要な対象物とを確実に判断することのできるレーダー装置を提供する。
【解決手段】測定範囲内に存在する対象物毎の相対速度、相対距離及び上下角度を測定し、相対距離が予め定めた距離閾値以下、且つ、相対速度が予め定めた速度閾値以下である対象物の上下角度を目標上下角度として設定する。そして、設定した目標上下角度と測定範囲内に存在する対象物の上下角度との相関値が基準値以下である対象物を必要対象物と判断し、当該相関値が基準値を越える対象物を不要対象物として判断する。
(もっと読む)
路面下空洞の探査方法

【課題】反射信号を適切に処理することによって路面下の空洞の判別を容易にする。
【解決手段】反射信号を受信し、反射信号から空洞に基づく反射波以外の反射信号のうち、舗装構造や地下構造等による連続して共通的に受信される反射信号を除去して空洞に固有の信号を抽出し、所定区間(B)の反射信号をその区間における最大値に基づいて無次元化し、無次元化した信号からエネルギーが集中している所定規模以上の信号を抽出し、空洞上面からの反射信号に固有の極性を有することによって空洞として判別する。更に、当該反射信号、反射信号を所定区間(A)において平均化した信号が空洞特有の反射信号を呈している場合、または所定区間(A)での空洞特有の反射信号の連続性等が認められる場合に空洞と判定する。
(もっと読む)
画像処理装置及び画像処理システム及び画像処理方法及び画像処理プログラム
【課題】能動的に電波を放射するRFIDタグなどを利用して、合成開口レーダの再生画像から特定の位置を容易に検出し、その位置に合わせて再生画像を補正する装置を提供することを目的とする。
【解決手段】画像処理装置510は、合成開口レーダ200からのパルス波に応じてRFIDタグ300aから送信された電波と地表からの当該パルス波の反射波とを反射波データとして反射波データベース501から取得する。そして、RFIDタグ300aから電波により送信された識別子データを反射波データから取得する。また、RFIDタグ300aの識別子データに対応する設置データを位置データベース502から取得し、その設置データにより示された電子基準点400aから位置データを取得する。画像処理装置510は、反射波データに基づいて地表の画像を生成し、位置データに基づいて当該画像を補正する。
(もっと読む)
車両用走行安全装置
【課題】複数のレーダ装置を設けた場合に生じる不検知領域に物体が存在すると予測される場合に、接触回避効果を高める。
【解決手段】送受信手段が複数備えられており、回避支援手段は、自車前方の領域であって一の送受信部の検知領域および他の送受信部の検知領域間の不検知領域に外挿部により外挿された制御対象物体が存在する場合には(ステップS14:Yes)、不検知領域以外に外挿部により外挿された制御対象物体が存在する場合の作動内容(ステップS8)よりも、接触回避効果の高い作動内容(ステップS11)を設定する。
(もっと読む)
目標追尾誘導装置及び方法
【課題】レーザ照射機、目標、飛翔体のなす角に関係なく、シーカが安定した強度の反射光を検出することができ、これにより、レーザ出力調整装置等を付けることなくシステムが構成でき、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用上の制限を無くすことができる目標追尾誘導装置及び方法を提供する。
【解決手段】目標1に対しレーザビーム3を照射するレーザビーム照射装置12と、目標によるレーザビームの反射光4を検出する赤外線シーカ16を搭載した飛翔体14とを備え、目標に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標を捕捉し、目標方向に向けて飛翔体を飛翔させる。レーザビーム照射装置12で発生するレーザビーム2の偏光を直線偏光から円偏光に変換する偏光変換素子18(4分の1波長遅相子)を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビーム3を目標に対し照射する。
(もっと読む)
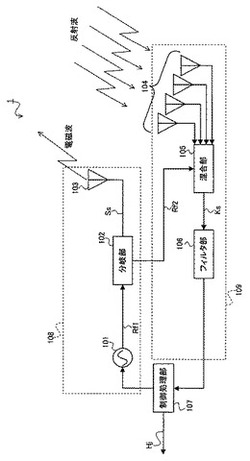
レーダ装置およびアクティブターゲット装置
【課題】レーダ波を送信して目標物からの折り返し信号を受信し、各目標物との詳細な距離/速度を検出するとともに、目標物における無駄な電力消費を削減する。
【解決手段】制御部101は、無線通信機能の動作時に、目標物のアクティブターゲット装置を指定する局ID情報を含むパケットデータPDを出力し、変調回路105は、そのデータを発振器104からのレーダ波に乗せて送信する。アクティブターゲット装置は、自局の局ID情報を受信した場合に折り返し送信を起動し、ミキサ108は、レーダ機能の動作時に、送信レーダ波の一部と折り返し送信されたレーダ波を混合することにより、ビート信号を検出する。
(もっと読む)
物体、特に危険物を検出する装置
本発明は、物体を検出する装置に関する。この装置は、少なくとも1つのマイクロ波周波数送信器(2)と、少なくとも1つのマイクロ波周波数受信器(1)とを備える。受信器(1)は、送信器(1)を中心として相対的な回転移動を行い、信号は、相対的な回転の円上の受信器のいくつかの位置で個人に向けて送信され、物体の点で反射され、位置において受信器(2)により受信される信号は、処理手段に供給されて、レーダ画像が形成される。受信器(1)および送信器(2)は、非常に低い慣性モーメントを有する円盤(5)上に設置することができる。本発明は特に、人が携帯する武器または爆発物の検出に適用される。 (もっと読む)
便器洗浄装置
【課題】ドップラーセンサを用いた便器洗浄装置において、外乱による便器洗浄バルブの誤作動を少なくし、特定動体に応じた便器洗浄バルブの制御精度の低下も回避する。
【解決手段】便器洗浄装置は、ドップラーセンサ2と、ドップラーセンサ2からのドップラー信号における第1の周波数帯域Bのレベルが第1のレベルTBであることにより特定動体10を判別し、該判別に応じて便器洗浄バルブ50を制御する制御手段3とを有する。制御手段は、ドップラー信号が第1の周波数帯域より低い第2の周波数帯域Aの成分を含み、かつ第1の周波数帯域における一部の周波数部分B1のレベルが第1のレベルである場合は、第1の周波数帯域における該一部の周波数部分を除く他の周波数部分B2を第1の周波数帯域に再設定し、再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別する。
(もっと読む)
移動支援システム
【課題】
従来のICタグを活用した自律移動支援は、目的地までの移動手段や経路を示すものであり、実際に歩行した際の軌道までは考慮されていない。
【解決手段】
移動体に設置された複数のICタグからのデータを受信し、受信した前記データを用いて前記移動体の移動を支援する移動支援システムにおいて、それぞれが、前記データの発信距離の異なる複数の前記ICタグから第1のデータおよび第2のデータを受信することが可能であって、前記移動体の移動経路に沿って設置された複数のデータ受信手段を用意し、前記複数のデータ受信手段のそれぞれにおいて、受信した前記複数のデータ受信のそれぞれにおける前記第1のデータおよび前記第2のデータの受信状況に応じて、前記移動体における移動状況を特定する。
(もっと読む)
物体検出装置
【課題】二つの検知手段の検知結果に基づいてゴースト判定を行うことにより、適切な物体検出が行える物体検出装置を提供すること。
【解決手段】車両2の前方にある物体を検知するレーダ5、及び車両2の前側方にある物体を検知するレーダ3、4を備え、レーダ5により物体をトラッキングしている際にその物体より近距離の位置に他の物体が検知された場合、レーダ3、4の検知結果に基づいて他の物体をレーダ5トラッキングの対象とするか否かを判断して物体検出を行う。この場合、レーダ3、4の検知結果に基づいて他の物体をレーダ5のトラッキングの対象とするか否かを判断することにより、他の物体が大型車の反射などによるゴーストであるか否かを的確に判断することできる。
(もっと読む)
デュアルユースのRF指向性エネルギー兵器および撮像装置
デュアルユースのRF指向性エネルギー兵器および撮像装置を開示する。発電機が、ビームディレクターによって対象物に向けられる、RF電磁エネルギーの第1のビームを提供してもよい。撮像装置が対象物の画像を形成してもよい。撮像装置は、ビームディレクターによって規定される開口を共有してもよい。 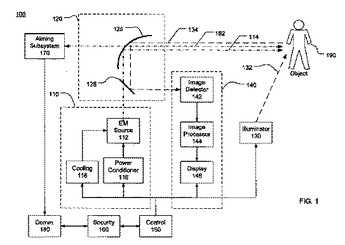 (もっと読む)
(もっと読む)
埋設物位置特定装置
【課題】 従来の地雷回収には、広域な地雷原に埋設された地雷を回収するのに時間を要するため、短時間で効率的に位置を特定できる装置が求められていた。
【解決手段】 電波を受信したら埋設物識別子を送信する無線部搭載埋設物と、自位置情報と電波送信時刻と埋設物識別子と埋設物識別子受信時刻を送信する主局装置と、主局装置と時刻同期であり自識別子と自位置情報と埋設物識別子と埋設物識別子受信時刻を送信する複数の従局装置と、複数の従局装置より受信した従局装置識別子と従局装置位置情報と埋設物識別子と従局装置の埋設物識別子受信時刻、及び主局装置より受信した主局装置位置情報と埋設物識別子と主局装置の埋設物識別子受信時刻と主局装置の電波発信時刻とに基づき、無線部搭載埋設物の位置を特定する位置特定装置とを備える。
(もっと読む)
位置情報通知装置
【課題】 使い勝手に優れ、しかもランニングコストの低減を図ることができる位置情報通知装置を提供する。
【解決手段】 装置本体1の電源として充電式電池2を使用し、また、装置本体1にACアダプタ8を接続可能とし、充電式電池2を満充電まで充電し、次の使用を可能にした。また、組み込まれる充電式電池2として、10C以上の電流で急速充電できるリチウムイオン二次電池が用いられことも特徴としている。
(もっと読む)
移動物体検出装置および自律移動物体
【課題】混雑環境下での移動物体の精度よいトラッキングが行える移動物体検出装置および移動ロボットを提供すること。
【解決手段】空間の混雑度を測定してトラッキングに利用するもので、方向成分では、混雑度が低ければレーザレンジセンサの計測値を重視し、混雑度が高くなると画像処理結果を重視したセンサフュージョンを行い、得られた移動物体推定方向に対してレーザレンジセンサの計測結果から距離を求める。
(もっと読む)
物体探索装置、物体探索システム及び無線通信端末
【課題】 予め探索対象物体(例えば、物品、生物、人間など)の位置情報を登録することなしに、その探索対象物体が現在何処にあるのかを明らかにする物体探索システムを提供する。
【解決手段】 本発明による物体探索システムは、探索対象物体を探索する物体探索装置と、探索対象物体に付けられている無線タグとを備える物体探索システムであって、物体探索装置は、無線タグと通信をする無線通信手段と、無線タグと電波を送受信する際の電波情報に基づいて無線タグとの間の距離を測定する手段と、距離を測定した測定位置の位置情報を取得する手段と、2以上の異なる測定位置において距離が測定されると、距離と測定位置の位置情報とに基づいて探索対象物体の位置を推定する手段と、推定された位置に関する情報を出力する出力手段とを有することを特徴とする。
(もっと読む)
物体検出装置
【課題】多様な霧や湯煙等の不規則形状物体を簡易かつ確実に判定することができる物体検出装置を提供する。
【解決手段】車両の周辺に電磁波を送信して、その反射波から車両周辺の物体を検出する物体検出装置は、電磁波の送信タイミングと受信タイミングから反射点までの距離を算出し、電磁波の照射方向から電磁波が物体上で反射点の実空間ベクトルを算出する(STEP40)。また、複数の反射点を距離が所定範囲内となる反射点を1つの反射点群として分類し、該反射点群の存在する実空間上の範囲を1つのセグメントとする(STEP50)。そして、第1反射点群としてセグメント化された第1セグメントにおいて、第1セグメントを通る前記電磁波の走査線上で第1反射点以外の第2反射点をも生じている第1反射点が所定の比率以上存在する場合に、該第1セグメントから構成される物体を霧や湯煙等の不規則形状物体であると判定する(STEP60)。
(もっと読む)
前方障害物検出装置
【課題】前方障害物と同等なレベルの反射波を返す路上静止物を前方障害物として誤検出することを防止する。
【解決手段】本発明の前方障害物検出装置(レーダセンサ部50)は、先行車両が前方物体の上方を通過すると該前方物体を路上静止物とする第1の路上静止物認識部13bと、先行車両が前方物体の前方に存在すると該前方物体を路上静止物とする第2の路上静止物認識部13cと、自車両の車速が所定車速以上かつ前方物体が継続的に検知される2つの他の前方物体の間に存在すると該前方物体を路上静止物とする第3の路上静止物認識部13dと、前方物体が至近距離ではじめて検知されると該前方物体を路上静止物とする第4の路上静止物認識部13eと、前方物体の反射波出力が自車両との距離が所定値に至るまで単調増加し、該距離が該所定値以下になると単調減少する特性を有すると該前方物体を路上静止物とする第5の路上静止物認識部13fとを有する。
(もっと読む)
レーダー装置
本発明は、高周波回路とアンテナを備え、地面に対する速度を測定するためのレーダー装置(1)に関する。高周波回路は高周波チップ(7)として構成されており、該高周波チップは複数のアンテナ出力端(42)を有し、該アンテナ出力端はアンテナ線路(13)を介してホーン形アンテナ(28)と接続されている。 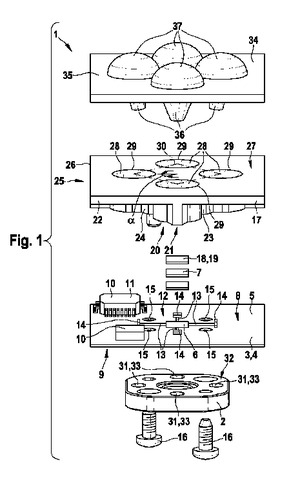 (もっと読む)
(もっと読む)
屋内迷子捜索システム
【課題】引率者からはぐれてしまった人の現在位置を精度良く特定する屋内迷子捜索システムを提供する。
【解決手段】屋内迷子捜索システムは、登録した人が履く靴の靴底に付けら且つ個体識別番号が記憶されたRFIDカードと、床面に設置され且つ上記登録した人が履く靴の靴底が接近したときに上記RFIDカードから個体識別番号を読み取るリーダと、屋内を見渡せる箇所に設置され且つ捕捉した人の位置を検出するレーダと、上記リーダの設置位置と上記レーダが捕捉した人の位置との相関を求めるとともに相関が認められるときには上記レーダが捕捉した人が上記RFIDカードを付帯していると判定し上記個体識別情報および位置情報を含むリーダ・レーダ情報を送出し、且つ相関が認められた位置に居る人を以後上記レーダおよび上記リーダにより追尾し上記リーダ・レーダ情報を送出する検索者検出装置と、を有する。
(もっと読む)
車両用警報装置
【課題】 速度検出装置が設置されている位置を通過してもすぐに運転が漫然となって事故につながることを防止する車両用警報装置を提供する。
【解決手段】 S12では、速度検出装置が車両の速度を検出する検出位置を通過する手前側に第1警報エリア、車両が検出位置を通過側に第2警報エリアが設定される。S14では、車両の現在位置が第1あるいは第2警報エリア内か否かを判定する処理が実行される。S16において、車両の速度が走行路の制限速度以上であると判定されると(S16:YES)、警報音がスピーカ29から出力される(S18)。この車両用警報装置1では、速度検出装置の手前でも警報がなされるが、運転者が速度検出装置を目で確認し、速度検出装置を通過した後も警報が発せられるので、速度検出装置が設置されている位置を通過してもすぐに運転が漫然となって事故につながることを防止することができる
(もっと読む)
81 - 100 / 195
[ Back to top ]